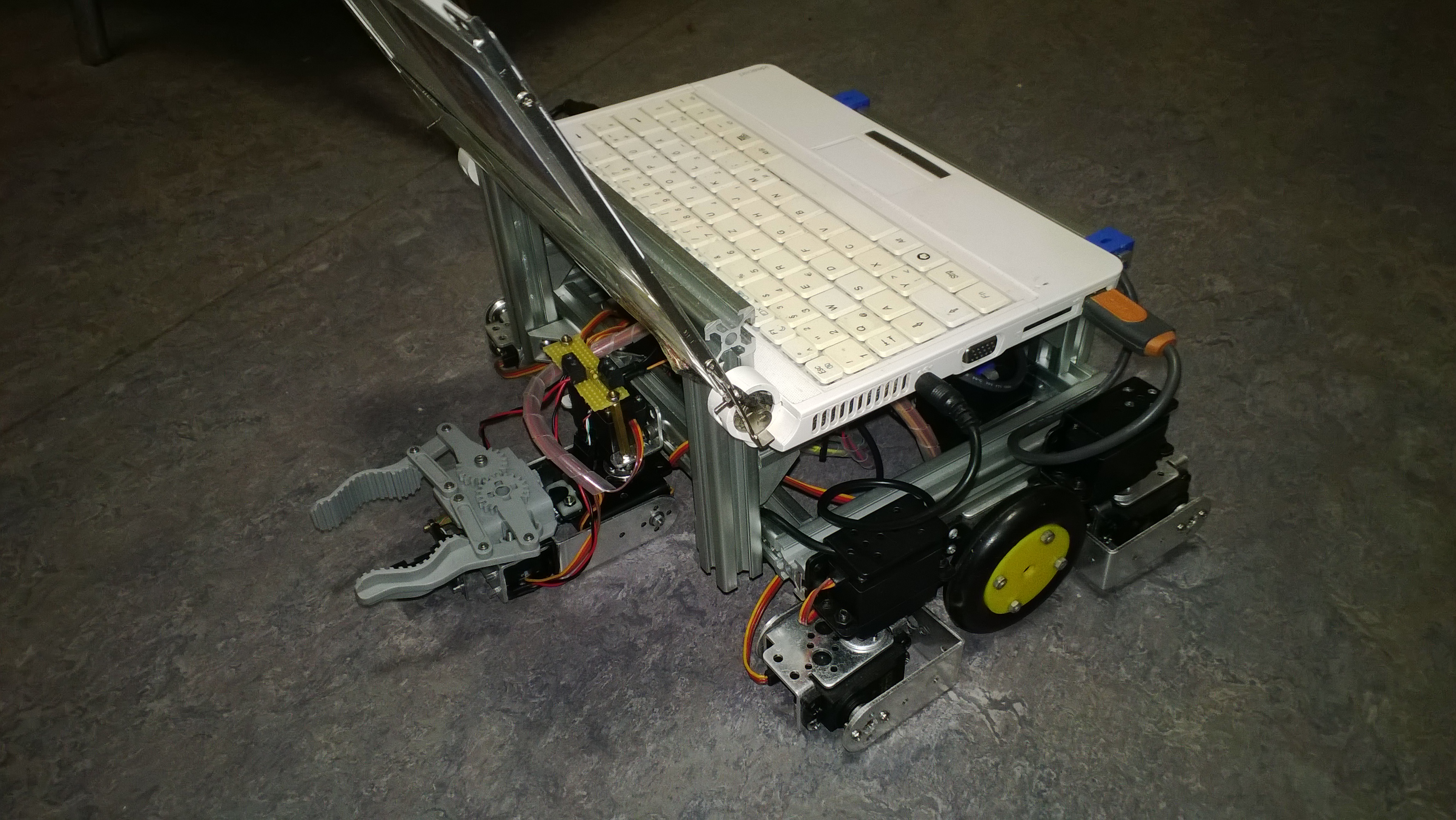
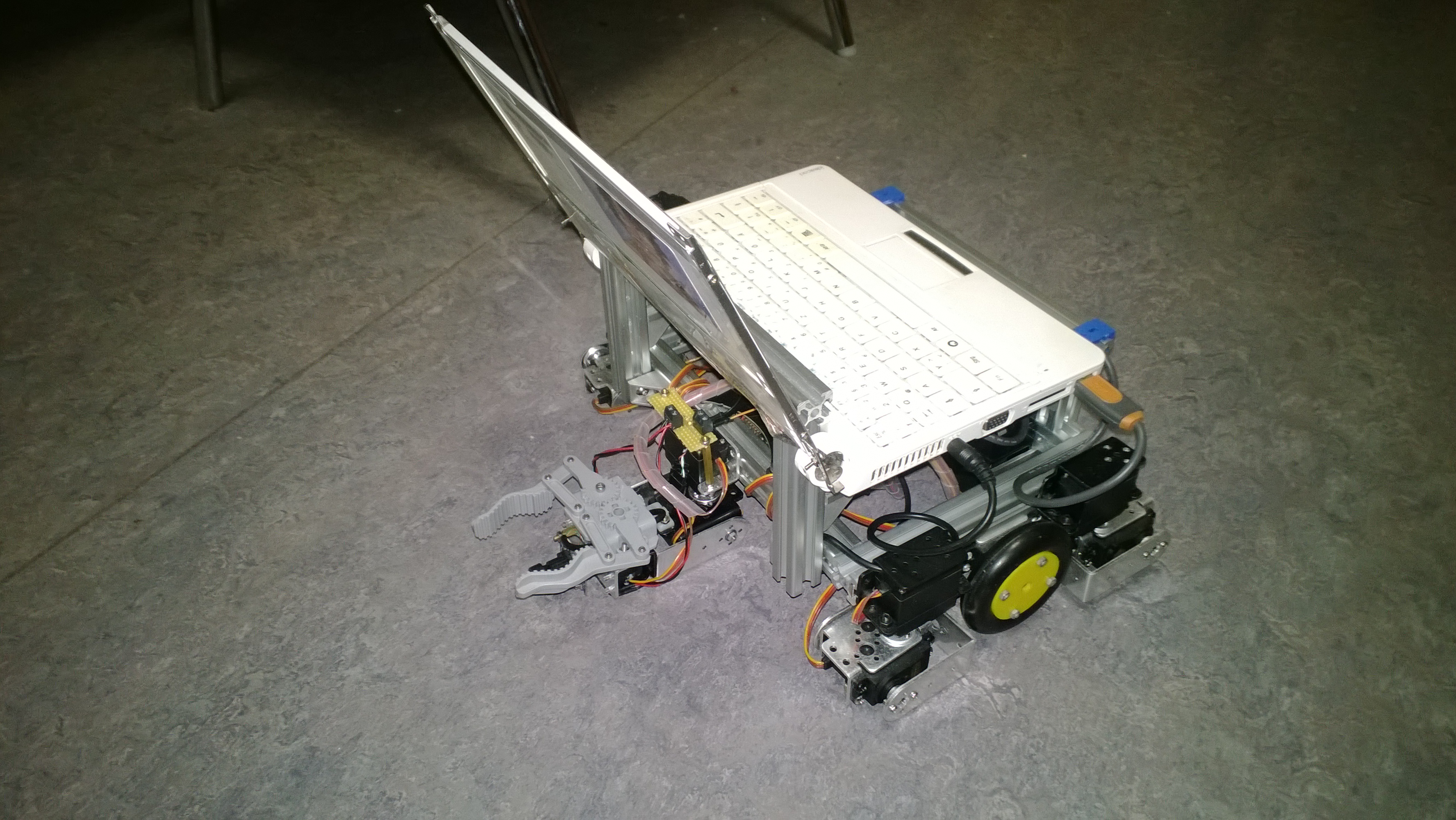
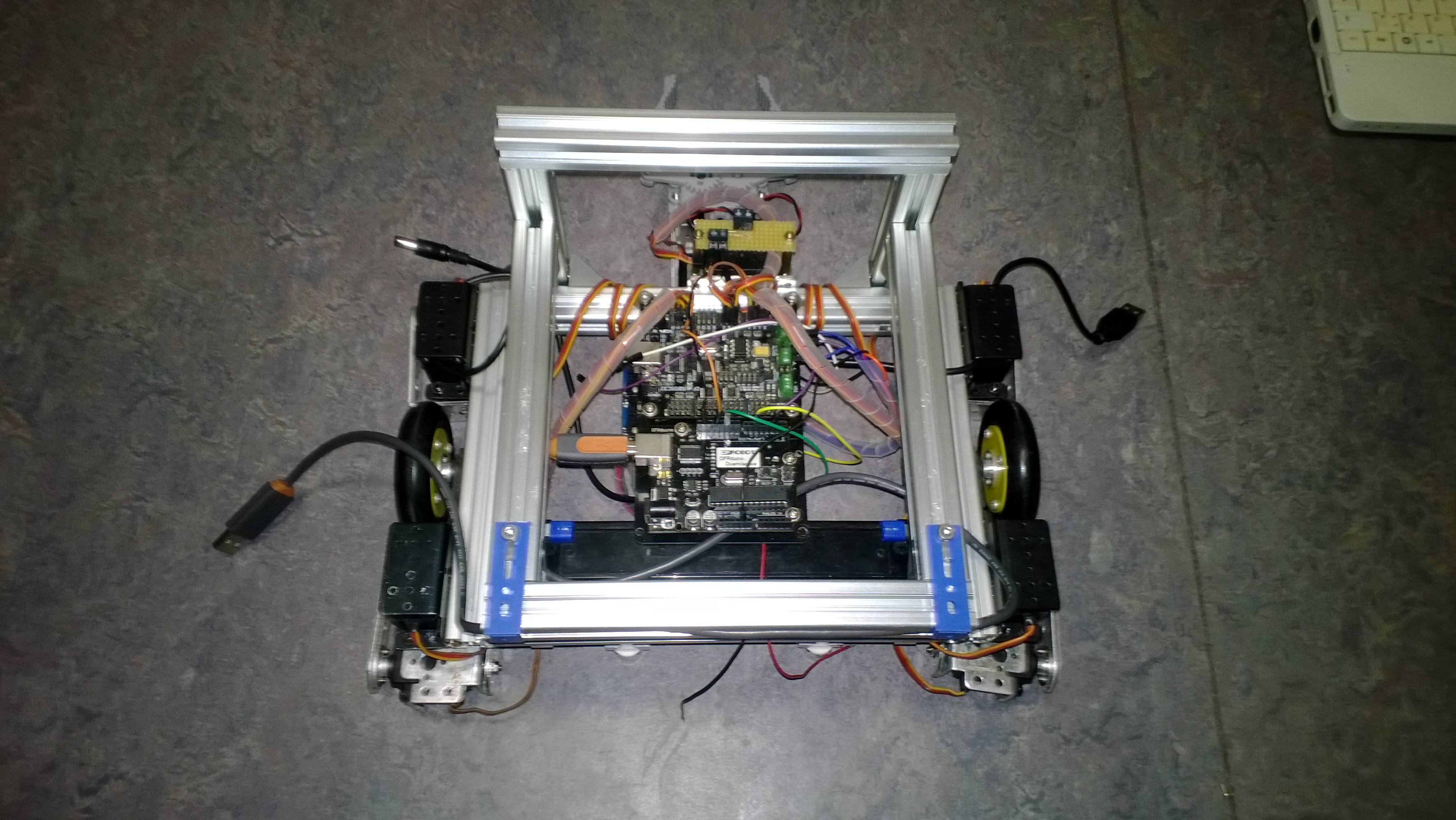
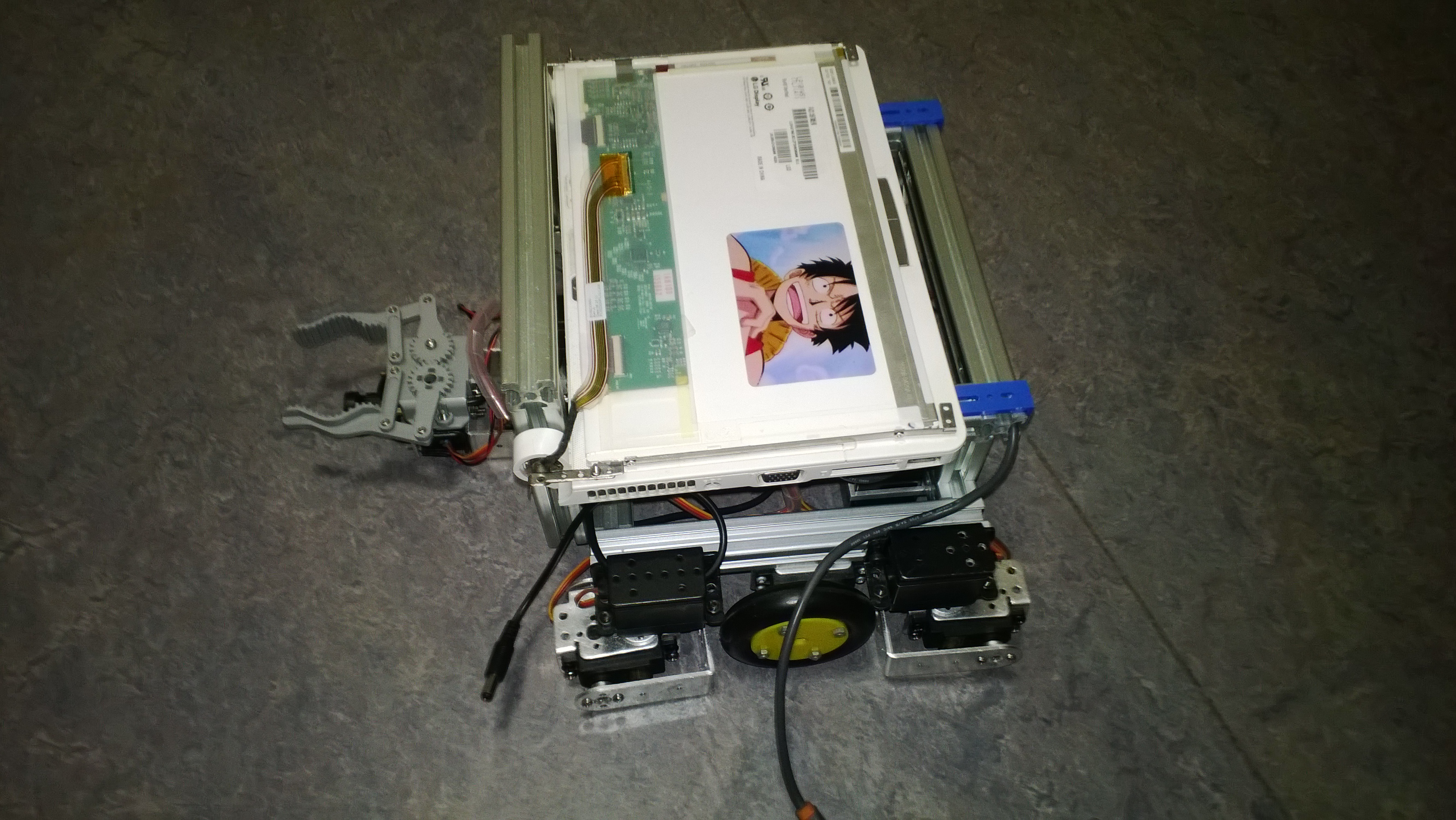
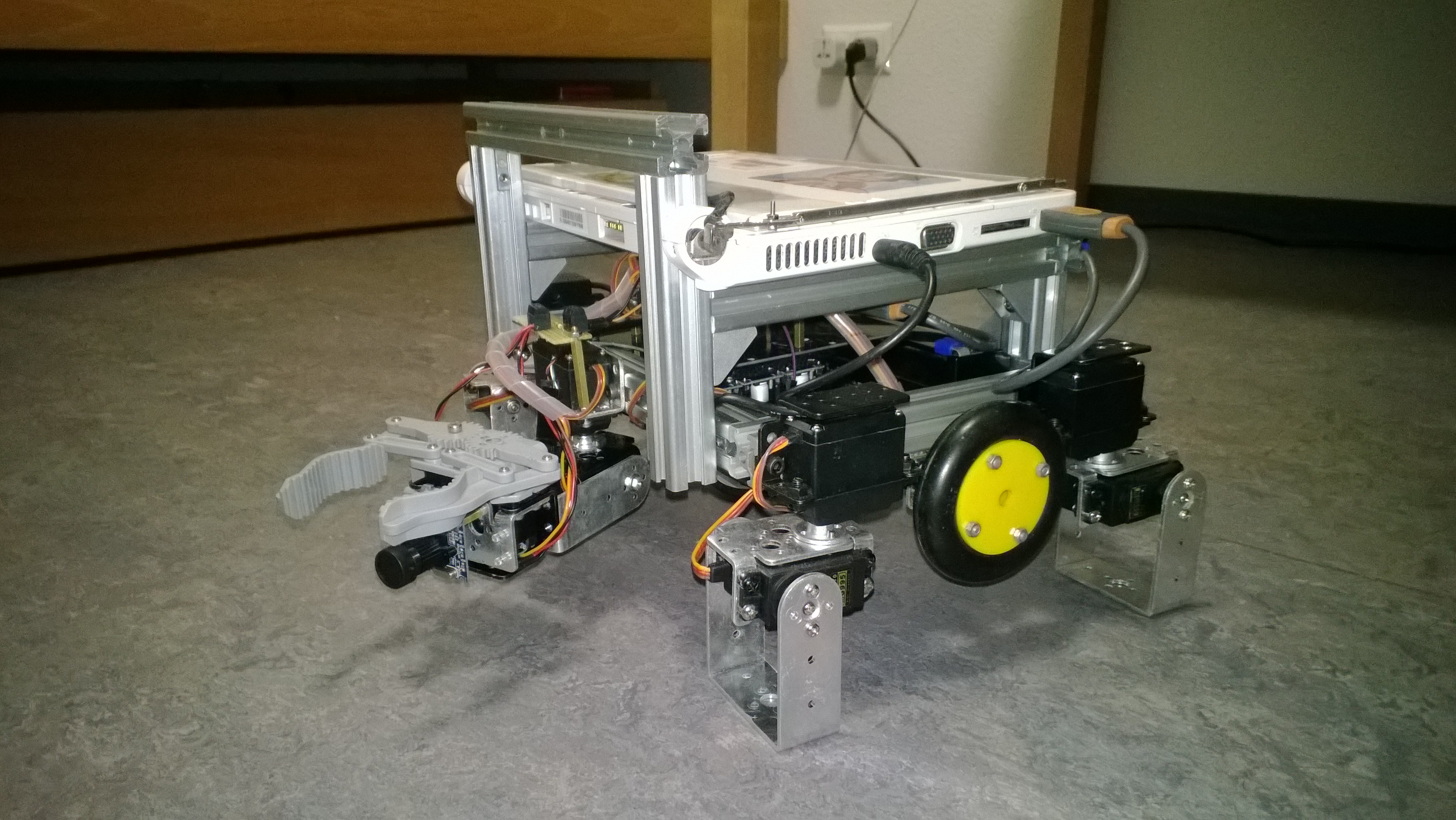
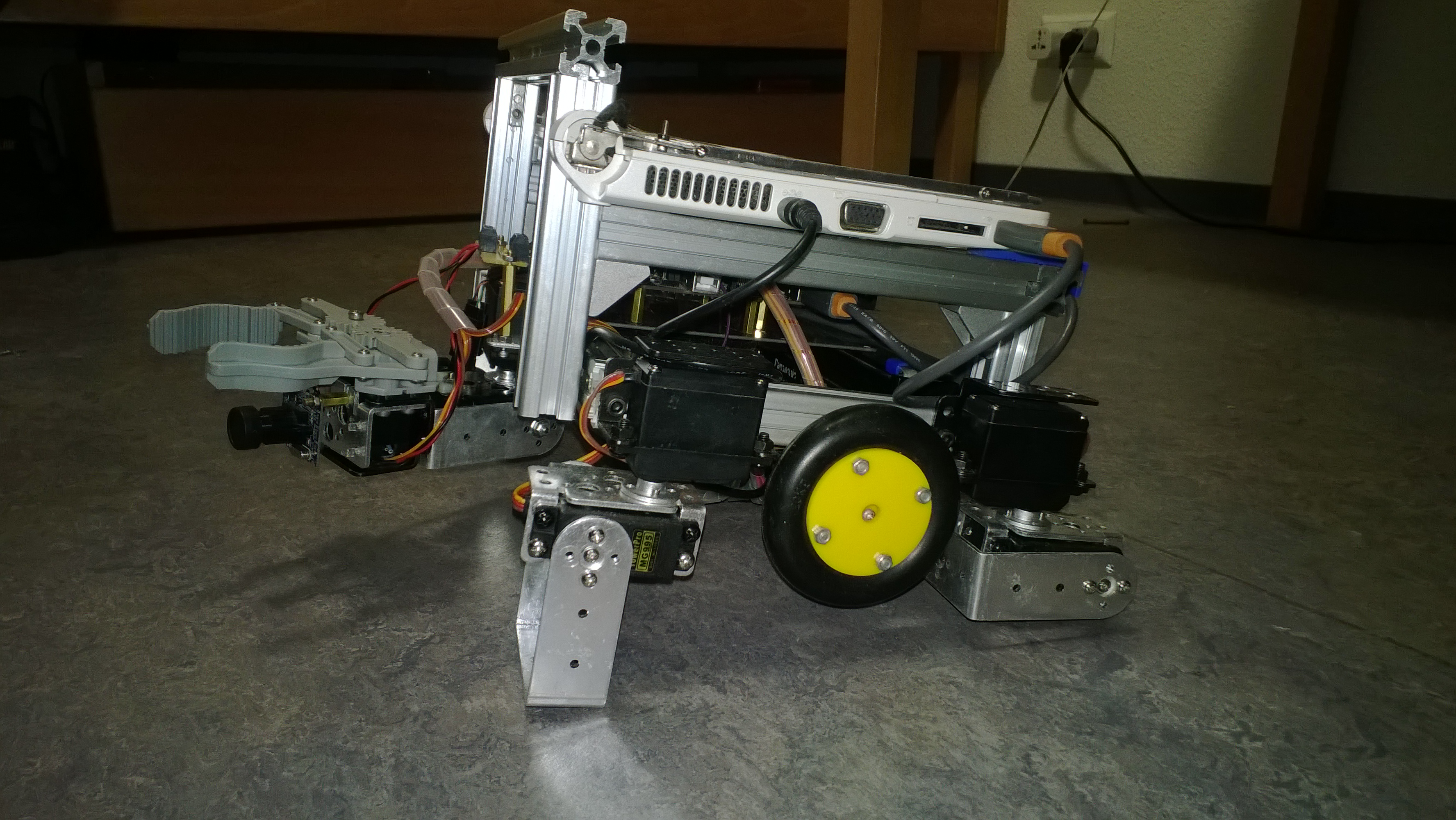
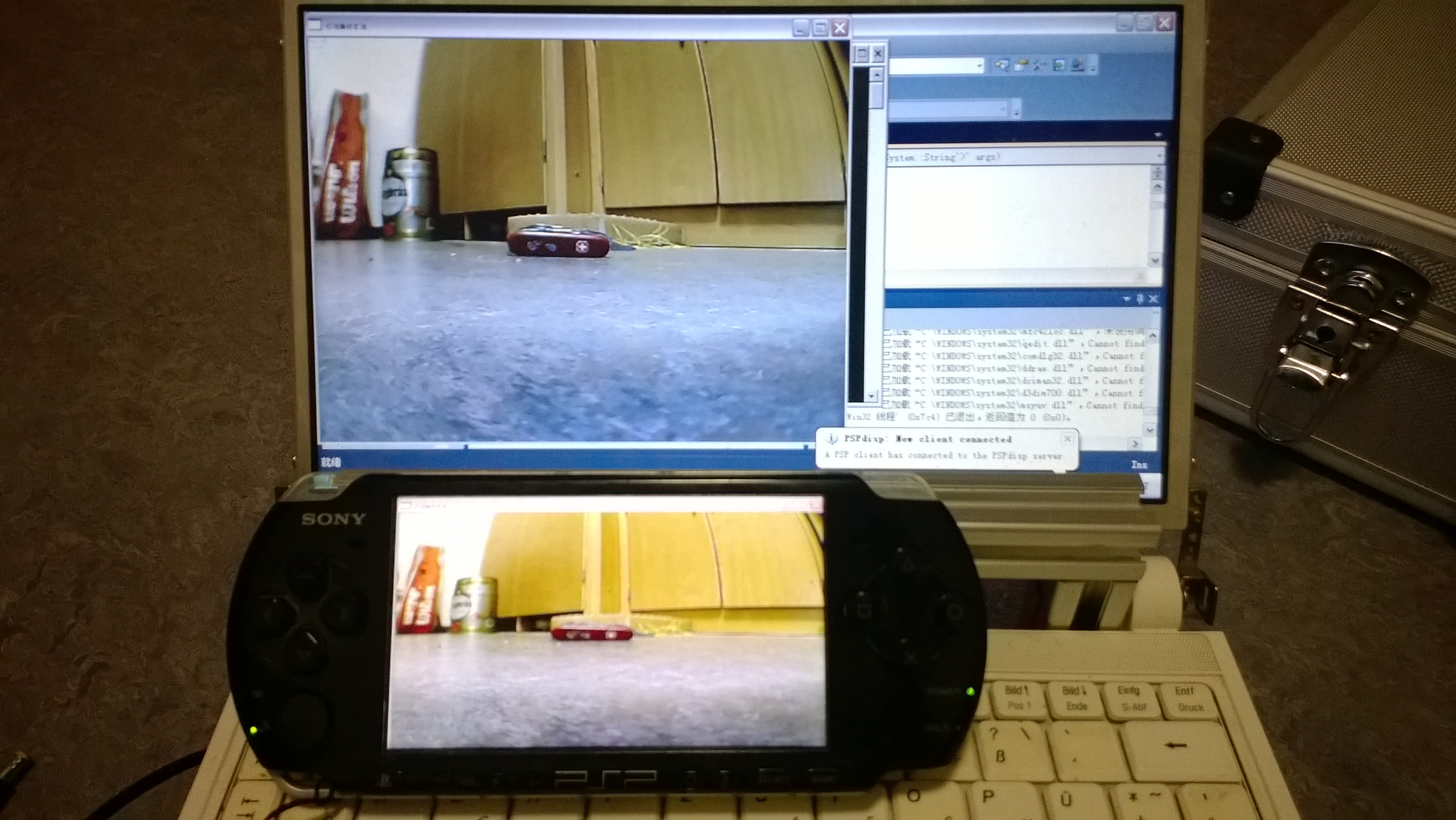
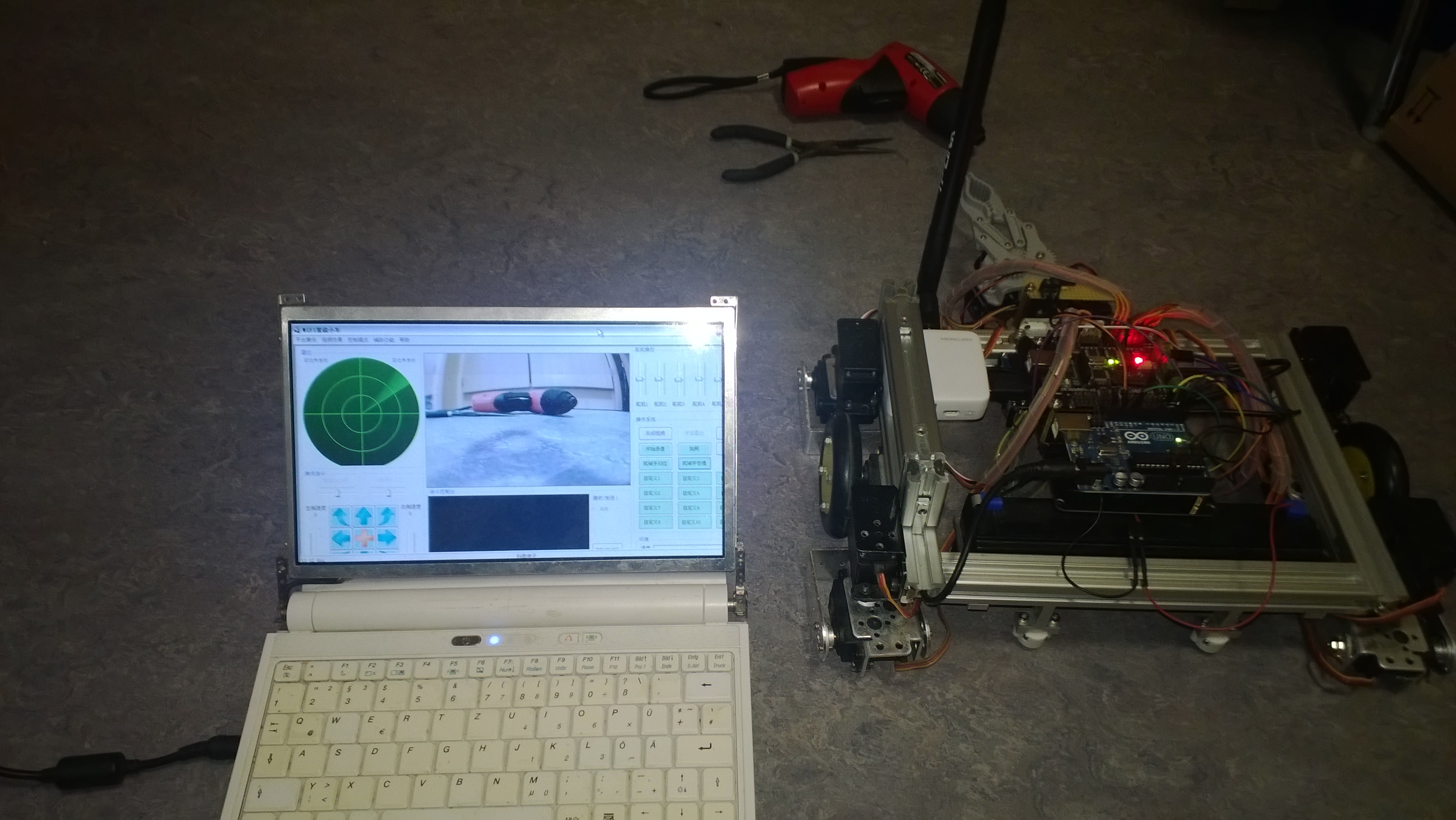
第一个版本,用了上网本做机器人 主机,通过其它终端遥控。实现其它确实很简单,还能独立完成一些复杂任务。但是遥控的角度上还是有些很多弊端,比如视频和控制都有明显延时,psp容易,上网本耗电过多,如果选择从机器人的电池获得供电,一次充满玩不了多久就没电了。基于上述情况,决定把遥控改了。喜欢该贴的、下载代码的顺手点个支持吧 第一版: Arduino uno控制板一块#include "stdafx.h"
#include "windows.h"
using namespace System;
using namespace System::IO::Ports;
int main(array<System::String ^> ^args)
{
Console::WriteLine(L"Serial test");
SerialPort^ arduino;
arduino = gcnew SerialPort("COM3",9600);
arduino->Open();
int i=1;
while(1){
if(i%2==1)
arduino->WriteLine("H");
else
arduino->WriteLine("L");
Sleep(1000); //延时1秒,其头文件为window.h
i=i+1;
}
return 0;
}
前面提到过opencv。为了以后的任务,如视频识别等,决定直接使用opencv。对于这里的遥控任务而言,可以直接打开usb摄像头,而且自带了键盘事件函数。示例代码如下
#include "stdafx.h"
#include <opencv2/opencv.hpp> // opencv库函数
using namespace System;
using namespace System::IO::Ports;
using namespace cv;
int main(array<System::String ^> ^args)
{
Console::WriteLine(L"Serial test");
cvNamedWindow( "window1", CV_WINDOW_AUTOSIZE);
SerialPort^ arduino;
arduino = gcnew SerialPort("COM3",9600);
arduino->Open();
int i=1;
while(1)
{
char c = waitKey(1000); //延时1秒,等待键盘事件,返回键值
switch(c)
{
case 'h':
arduino->WriteLine("H");
break;
case 'l':
arduino->WriteLine("L");
}
}
cvDestroyWindow("window1"); // 销毁窗口
return 0;
} 复制代码 第二版: C++和opencv方案 前面说了,之后图像处理的任务会交给上位机。第一版中,控制端的计算机就是用的C++搭opencv的方案。所以继续沿用该方案设计pc端程序。 建立一个C++ console项目,添加相关opencv库的添加和路劲配置,可以参考网上的资料。 http://192.168.1.1:8080/?action=stream 路由器成功烧写openwrt的话,可以用firefox浏览器在改地址下成功打开摄像头。opencv里的VideoCapture是可以利用ip地址打开网络摄像头的 如果直接使用视频流的地址是打不开的,因为VideoCapture的参数需要一个文件拓展名,所以在使用的时候给它加上一个虚拟变量。烧写了openwrt的路由器传输的视频流是mjpg。我们新的视频流地址就是 http://192.168.1.1:8080/?action=stream&type=.mjpg 现在来看这部分的完整代码,轻松打开摄像头。 #include "stdafx.h"
#include "opencv2/opencv.hpp"
#include "highgui.h"
#include "iostream"
using namespace System;
using namespace cv;
using namespace std;
int main(array<System::String ^> ^args)
{
Console::WriteLine(L"Hello World");
cvNamedWindow( "camera", CV_WINDOW_AUTOSIZE);
cvMoveWindow("camera",0,0);
const string cameraAddress = "http://192.168.1.1:8080/?action=stream&type=.mjpg"; //带虚拟参数的视频流ip地址
VideoCapture vcap;
Mat frame;
if(! vcap.open(cameraAddress))
{
Console::WriteLine(L"ERROR");
return -1;
}
while(1)
{
char c = cvWaitKey(10);
vcap.read(frame);
imshow("camera",frame);
if(c==27)
break;
}
cvDestroyWindow("camera");
return 0;
} 复制代码 控制部分。 按照网上的资料给路由器烧写openwrt后,控制地址为 http:\\192.168.1.1 端口号为:2001 路由默认的通信波特率为9600 using namespace System;
using namespace Sytem::Net;
using namespace Sytem::Net::Sockets; 复制代码 System::String^ controlip = "192.168.1.1"; // 不能包含 http:\\ 复制代码 System::String^ port = "2001"; 复制代码 Socket^ c = gcnew Socket(ipe->AddressFamily,SocketType::Stream,ProtocolType::Tcp); 复制代码 array<Byte>^ scode = Encoding::UTF8->GetBytes("arduino"); //arduino是要发送的数据,转换为Byte数组,保存到scod 复制代码 int led = 13;
void setup(){
pinMode(led,OUTPUT);
Serial.begin(9600);
}
void loop(){
char c;
if(Serial.available())
c = Serial.read();
if(c == 49)
digitalWrite(led,HIGH);
else
digitalWrite(le,LOW);
} 复制代码 下面是包含摄像头打开和发送测试数据的代码。 #include "stdafx.h"
#include "opencv2/opencv.hpp"
#include "highgui.h"
#include "iostream"
#using <System.dll>
using namespace System;
using namespace System::Net;
using namespace System::Net::Sockets;
using namespace System::Text;
using namespace cv;
using namespace std;
int main(array<System::String ^> ^args)
{
Console::WriteLine(L"Hello World");
cvNamedWindow( "camera", CV_WINDOW_AUTOSIZE);
cvMoveWindow("camera",0,0);
const string cameraAddress = "http://192.168.1.1:8080/?action=stream&type=.mjpg";
System::String^ controlip = "192.168.1.1";
System::String^ port = "2001";
VideoCapture vcap;
Mat frame;
if(! vcap.open(cameraAddress))
{
Console::WriteLine(L"ERROR");
return -1;
}
IPAddress^ ips = IPAddress::Parse(controlip);
IPEndPoint^ ipe = gcnew IPEndPoint(ips,Convert::ToInt32(port));
Socket^ c= gcnew Socket(ipe->AddressFamily,SocketType::Stream,ProtocolType::Tcp);
c->Connect(ipe);
array<Byte>^ scode = Encoding::UTF8->GetBytes("1");
array<Byte>^ rcode = gcnew array<Byte>(256);
while(c->Connected)
{
scode = Encoding::UTF8->GetBytes("0");
c->Send(scode,scode->Length,SocketFlags::None);
//c->Receive(rcode,c->Available,SocketFlags::None);
char k = cvWaitKey(10);
vcap.read(frame);
imshow("camera",frame);
scode = Encoding::UTF8->GetBytes("1");
c->Send(scode,scode->Length,SocketFlags::None);
if(k==27)
break;
}
cvDestroyWindow("camera");
c->Close();
return 0;
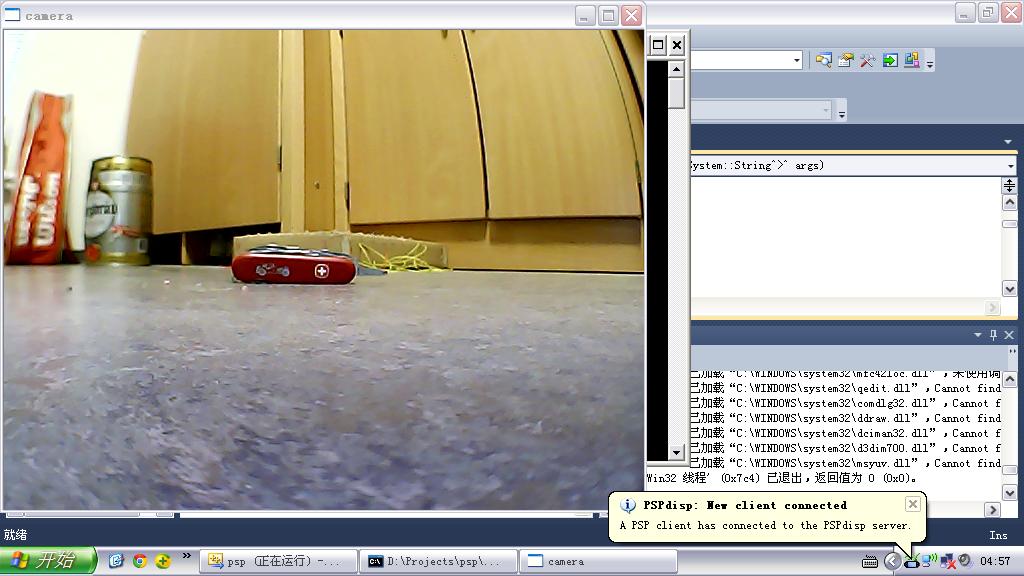
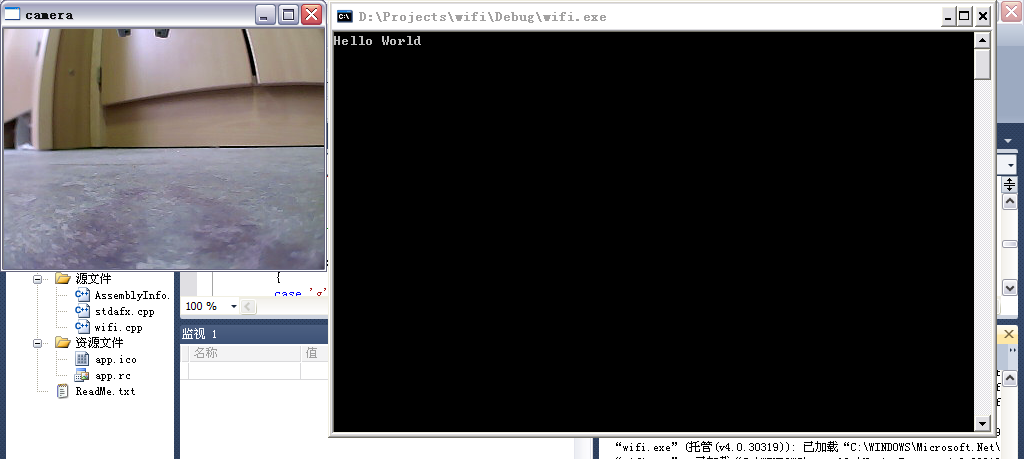
} 复制代码 最后可以看到Arduino控制板上的led等L在闪烁。 现在来控制机器人。Arduino的代码完全不需要改动。把第一版的c++代码移植到上面的代码里就完成了。完整的代码可以从下面附件下。C++程序运行截图 <uses-permission android:name="android.permission.INTERNET" >
</uses-permission>
<uses-permission android:name="android.permission.ACCESS_NETWORK_STATE" >
</uses-permission>
<uses-permission android:name="android.permission.CHANGE_NETWORK_STATE" >
</uses-permission> 复制代码 喜欢该贴的、下载代码的顺手点个支持吧  推荐
精华
推荐
精华

 [复制链接]
[复制链接]




 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






