|
7781| 4
|
[入门教程] 【掌控】mpython-14…带上handpy走四方 |
|
走四方 路迢迢水长长 迷迷茫茫一村又一庄 看斜阳 落下去又回来 地不老天不荒 岁月长又长 走四方 路迢迢水长长 迷迷茫茫一村又一庄 看斜阳 落下去又回来 地不老天不荒 岁月长又长 做个简易计步器,带上handpy走四方。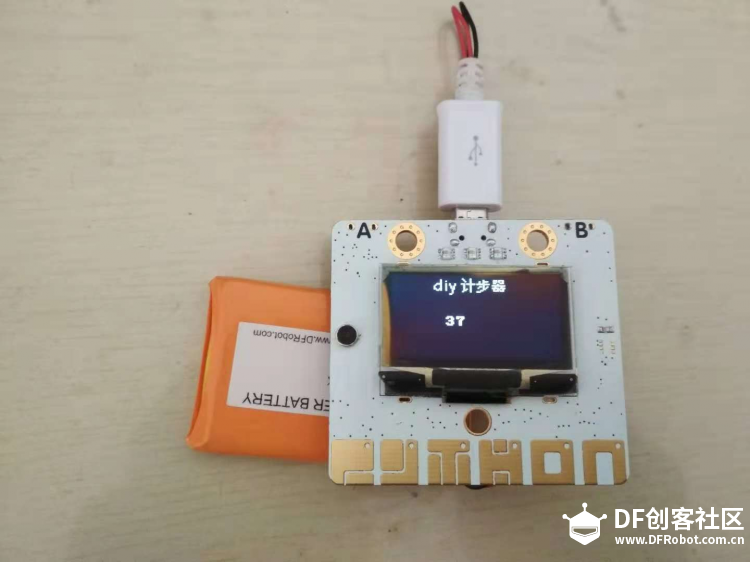 其实ESP32可以实现很强大的功能的,可是我还在低水平上徘徊。 入门课程,入门哈。 希望我能够把掌控的神力打开。 【程序】 功能,走路计步。 按A键清0。 [mw_shl_code=python,true]from machine import Pin #导入引脚库 from mpython import * #此库为掌控板内置传感器驱动 import time #导入时间库 #定义按钮引脚 BTNA = Pin(0, mode=Pin.OPEN_DRAIN, pull=Pin.PULL_UP, value=1) BTNB = Pin(2, mode=Pin.OPEN_DRAIN, pull=Pin.PULL_UP, value=1) #初始化读数变量 step = 0 #定义计步函数 def jibu(): display.fill(0)#清屏,以清掉以前显示数据 display.DispChar('diy 计步器', 32, 0) display.text("%d" % (step), 40, 32) display.show() #刷新显示屏 #x1 = accelerometer.get_x() #获取初始加速度数据 y1 = accelerometer.get_y() #z1 = accelerometer.get_z() jibu() while True: if BTNA.value() == 0 and BTNB.value() == 1 :#按下按钮A数据回0 step = 0 jibu() #x2 = accelerometer.get_x() #获取第2个加速度值 y2 = accelerometer.get_y() #z2 = accelerometer.get_z() if abs(y1 - y2) > 0.5: #abs(x1 - x2) > 0.5 or abs(y1 - y2) > 0.5 or abs(z1 - z2) > 0.5: #y轴的分时差值超过0.5,则认为检测到走动 step = step + 1 #步数加1 jibu() y1 = y2 #将y2数据存入y1 time.sleep_ms(400) #延时和个人行走步速有关,请根据个人情况调整[/mw_shl_code] 后面将尝试掌控的蓝牙及物联网功能。  虽是入门,也要有进阶不是吗。 |
|
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









