|
17453| 16
|
[项目] “变脸娃娃”诞生记 |

|
本帖最后由 怀若谷 于 2018-10-29 20:12 编辑 大家好,我是一个喜怒无常的“娃娃”!  半个月前的那个大PARTY,相信创客圈的朋友还记忆犹新。本人日常与外界创客朋友交流的重要渠道——“中小学micro:bit课堂教学群”,在吕启刚老师的组织下,申请了一个展位;不自量力的我,也报名提供作品参展。后来,因为琐事缠身,没有成行,但是——我家“娃”还是执意前往,在大上海露了下脸。感谢群里的朋友们!  共同的爱好让我们走到了一起,天下创客为一家!  幸福的“娃”,刚出生就去了上海创客嘉年华,我出生30多年了还没去过......  更幸福的是,我家“娃”还和这么多创客界大咖合影了呢!  在作品介绍的资料上,贴上了微信二维码,我想通过这种方式认识更多的创客教育者和创客爱好者。加上后来,吕老师的介绍,我的作品得到了一些朋友的关注。于是,想到把作品的制作过程写出来,和大家交流。但起初是没有这个想法的,所以很多环节都没有拍照留存,实属遗憾!
说起制作过程,也是一波三折,个中滋味,无法言表!仅看下面的文件数,便知程序和3D图纸是一改再改......本来想做一个川剧变脸的样子,但造型制作方面对于我来说困难太大,只好作罢,后来才有了“变脸娃娃”的诞生。  》》》准备 物料:  micro:bit 1块
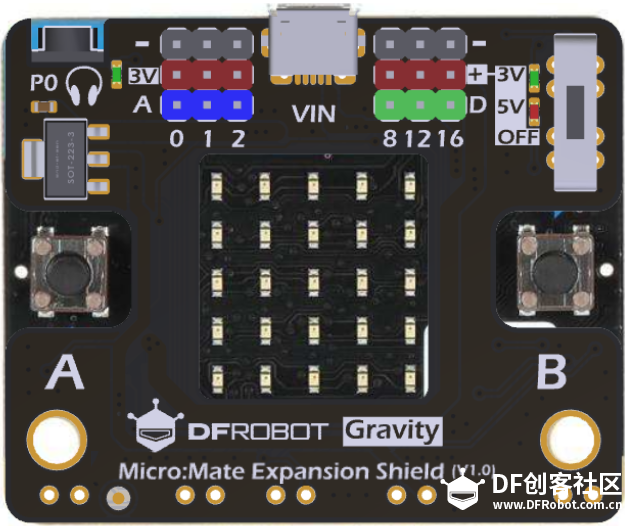 DF扩展板 1块 这块扩展板小巧,还支持5V输出,让micro:bit的扩展性增强了很多,必须赞一个!
 舵机 2个  红外循迹模块 1个  粘土 若干  自喷漆 (白色、黑色、金色各一瓶) 工具: 热熔枪 3D打印机 编程软件:  makecode离线版(小喵家的V2.3) 》》》硬件搭建  (因没有拍照,使用了装配后的照片;加上叙述,希望能说清楚) 1.将2个舵机堆叠起来,注意轴心和轴心必须在同一条直线上,下面一个舵机装一个单边的舵盘,方便固定;使用热熔胶固定。下面的舵机接在扩展板的12引脚上,上面的舵机接在16引脚上。扩展板电压调到5V档。为什么要用2个舵机?我的想法是“娃娃”最少有四个脸,显然一个180度舵机是不够的,至少需要270度才能实现;而问过很多朋友,360度的舵机,无法控制角度,显然不能满足我的需求;所以想到了这个办法,事实上还真不错。 2.红外循迹模块接在引脚1上。为什么选红外循迹模块?考虑到展会人多,用人体红外释热运动传感器,切不可行;超声波,太大,造型上不好处理;用个开关什么的,那就太LOW了.......经过反复测试,红外循迹模块能满足要求,但在寄出去之前的最后测试中,发现在光线比较强的环境中,极易容易自动触发,后来加了个遮光罩,但好不了多少。避开强光,才是正常运行的保障。 》》》编程  四张脸的位置 为四张脸各写了一个函数,通过两个舵机的角度组合达到每个脸之间相隔90度。由于4张脸实际只需要270度的角度就够了,所以在参数的设置上余地很大;为了防抖,不要使用0度和180度两个极点的位置,尽量远离。  初始化 启动后,将第1张脸转到起始位置;定义一个变量“num”,值设为0用来记录红外循迹传感器被触发的次数,以便控制脸的转换。 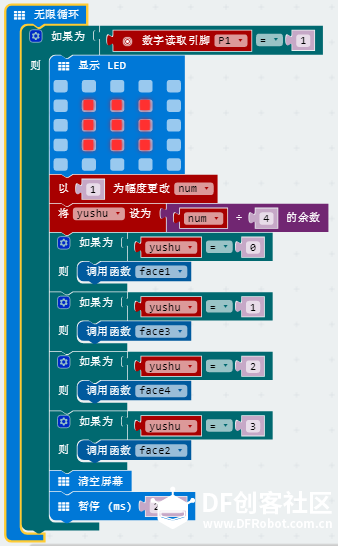 主程序 当红外循迹模块被触发时(P1的数字输入值为1),进行换脸工作。 1.LED点阵显示图案,作为工作状态标记,这个主要是调试时使用的。 2.将变量“num”的值加1。 3.定义一个变量“yushu”,将其值设为:“num”÷4的余数。因为有4张脸,所以需要一个转换机制,那就是用这个余数值来对应其中1张脸。 4.对应关系是: 余数=0 换成第1张脸 余数=1 换成第3张脸 余数=2 换成第4张脸 余数=3 换成第2张脸 为什么不按顺序对应?我的想法是,如果按顺序去对应,当转换成第4张脸后,那下一次就要换为第1张脸,中间需要经过270度,效率就会低,可能造成人手已经拿走了,脸还正在转动,那效果就大打折扣了。 5.清空屏幕,否则下一次是否被触发就看不出来了。 6.暂停2秒。目的是,一为了防止重复触发;二为了保护舵机,降低工作频率。 》》》制作3D造型 在放弃了川剧变脸的想法后,我对“变脸娃娃”又寄予了很高的期望。本来身体部分和外面的裙子是一体的。  然而,悲惨的是,我的那台3D打印机根本打印不了这么大的,后来就变成了下图的样子,还是分割成两部分打印的。最后,只能加上粘土做造型了。 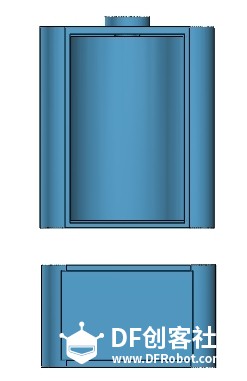 整个的外壳部件有:头冠、头部、身体、转轴和紧固件。  头冠 这个部分不仅要掩护里面的内部零件,而且要用来固定红外循迹模块,想来想去,最后设计成了一个头冠。  头部 这个头部是一体设计的,里面的椭圆形脸部是拿不出来的。 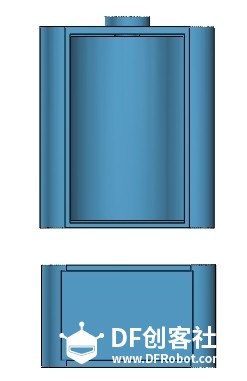 身体 这是身体的背部,分两层,用来分别安装舵机和micro:bit。考虑到,参加嘉年华就是为了和大家交流、分享,后来也没有加后盖。运行时,大家是可以看到里面是怎么工作的。  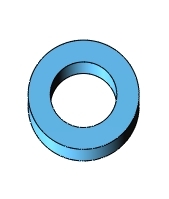 转轴和紧固件 转轴连接到舵机的舵盘上,用热熔胶固定;然后穿过身体部分的预留孔与脸部连接,使用热熔胶固定。 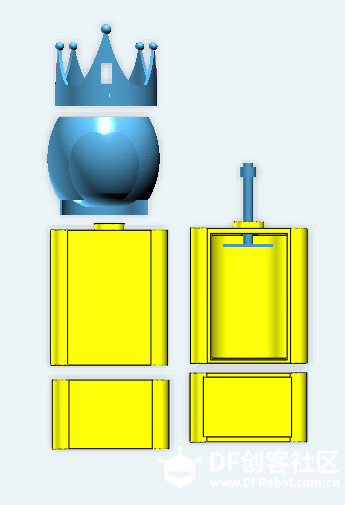 装配图 全套图纸下载: 提取码:uhff 》》》组装   利用热熔胶和502胶将各部件连接固定。组装后,一定要进行多次调试,确保不会产生摩擦、卡顿现象。 》》》喷漆  先用白色油漆将头部喷涂两遍做底漆,然后对里面的脸部再喷一到两遍白色油漆。待漆干后(最好不少于12小时),用东西包裹里面的脸部,对外部喷涂两到三遍黑色油漆。头冠部分,用东西包裹上面的球体,让其保持原色;其他部分用金色漆喷涂多遍,以达到期望的效果。 》》》画脸 将“娃娃”通电运行,启动后,不要触碰红外循迹传感器,关闭电源,画上第一张脸。然后,重新通电运行,让红外循迹传感器触发1次,转到第3张脸位置,画上第3张脸。然后同样的方法,依次画上第4张和第2张脸。反复测试,确保能稳定运行,而且达到比较满意的效果。  》》》造型完善 用粘土(我女儿建议我用布料,我没采纳)制作“娃娃”的裙子和手臂。     这是最早的版本,后来由于一些原因进行了重装,整个脸部进行了重新喷漆,也重画了4张脸,感觉比这个版本要稍好看些。当时没有拍照,现在“娃娃”到浙江做客了,还没回家,下次补上吧。 》》》调试、加固 尽管前面已多次调试,但全部工序完成后还是需要再多次调试。我最后就发现在强光环境中会自动触发的问题。确定没问题后,可以用热熔枪对一些连接部分进行加固。 |
怀若谷 发表于 2018-10-28 20:08 太厉害了! |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶










