|
9151| 7
|
[项目] 致敬经典 | 吞币存钱罐 |

本帖最后由 怀若谷 于 2025-8-22 20:33 编辑  【前言】  吞币机器人是一个有趣的电子制作项目,通过动手制作可以让孩子从中学习到一些科学知识,如控制马达运转的电路、连杆结构、重力作用等。它还是一个很实用的存钱罐。今天,我们用创客器材和技术也制作一个吞币存钱罐,由于有可编程主控板的加入,它的功能和可扩展性将大大增强。 【功能介绍】 当前版本设置了两个功能:(1)存钱,当人将硬币放在机器人的手掌上后,手臂会抬起,同时嘴会张开,硬币滑入口中,完成存钱操作。(2)取钱,如果需要将钱取出,可通过旋转耳朵,输入两个数字,与预设密码相同时,嘴会长时间张开,这时可倒出硬币。 演示视频 【实现原理】 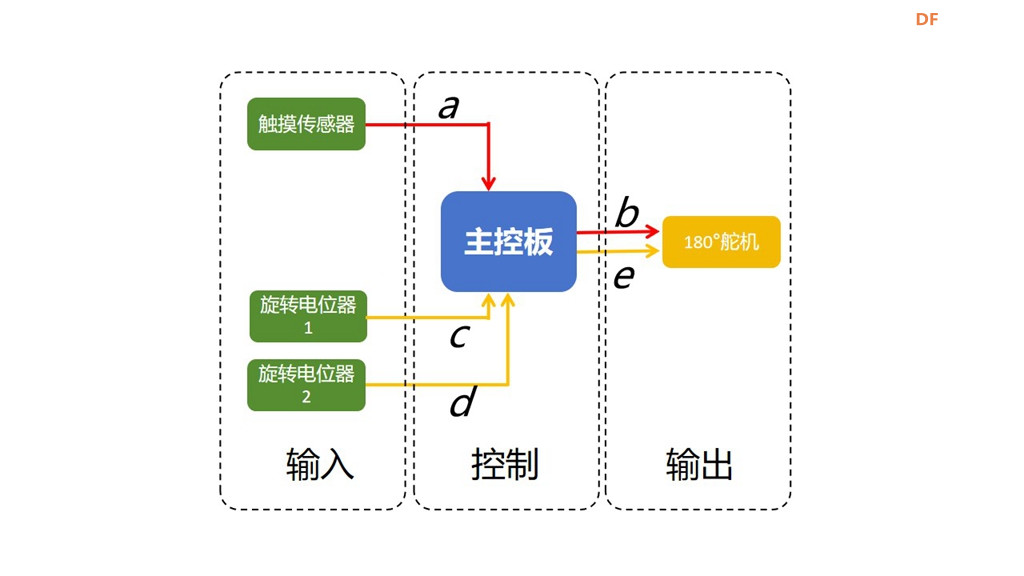 从系统构成来看,这是一个较简单的系统。当触摸传感器向主控板输入一个触发信号a后,主控板向舵机发出指令b ,使舵机旋转带动机器人手臂抬起、嘴张开,等待一定的时长后再复位,完成吞币动作。当两个旋转电位器输入的数据c和d与程序预设的密码一致时,主控板向舵机发出指令e ,使舵机旋转带动机器人手臂抬起、嘴张开,并持续等待,直到数据c和d与程序预设的密码不一致时,控制舵机复位,以带动手臂和嘴复位。 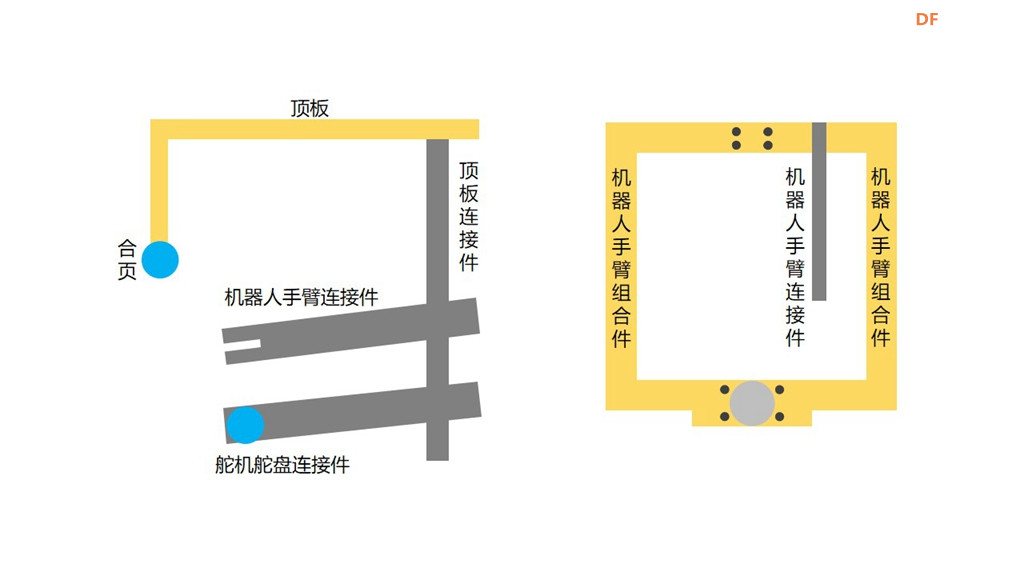 机器人手臂和嘴的运动机构采用了如上图所示的连杆结构,利用了平行四边形的可变形特性。当舵机转动时,带动舵机舵盘连接件旋转,作为平行四边形另两条边的机器人手臂连接件和顶板连接件会同步做平移或旋转运动,从而驱动手臂件和顶板件实现手臂抬放、嘴巴张合的动作。 【硬件清单】 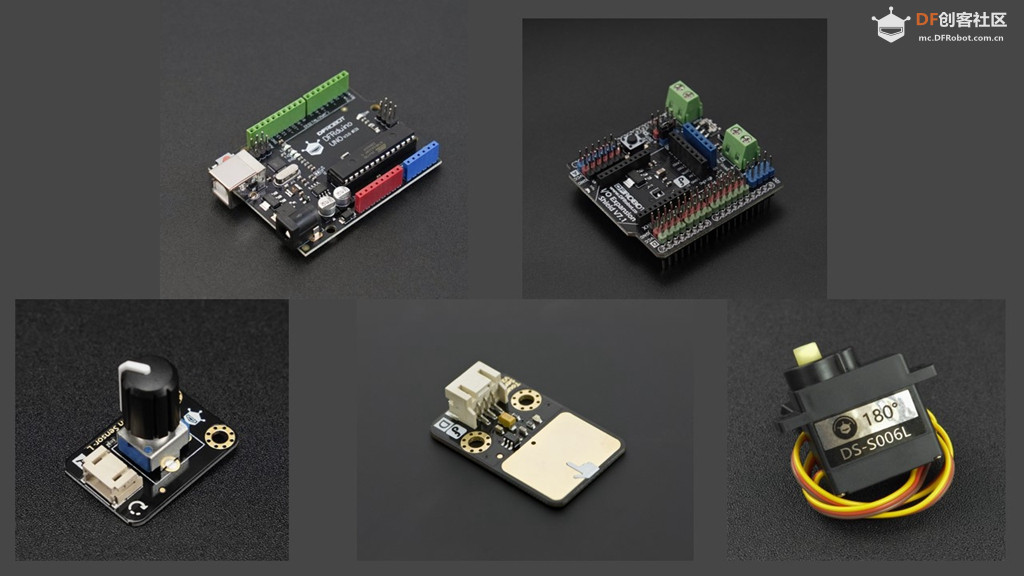 1. Arduino Uno主控板 1块 2. IO扩展板 1块 3. 旋转电位器 2个 4. 触摸传感器 1个 5. 180°舵机 1个 【其他材料】 1. 金属合页及安装螺丝 1套 2. 铜箔胶带 10厘米 3. 微型轴承 2个 4. M3螺栓螺母 8对 【制作过程】 一、硬件连接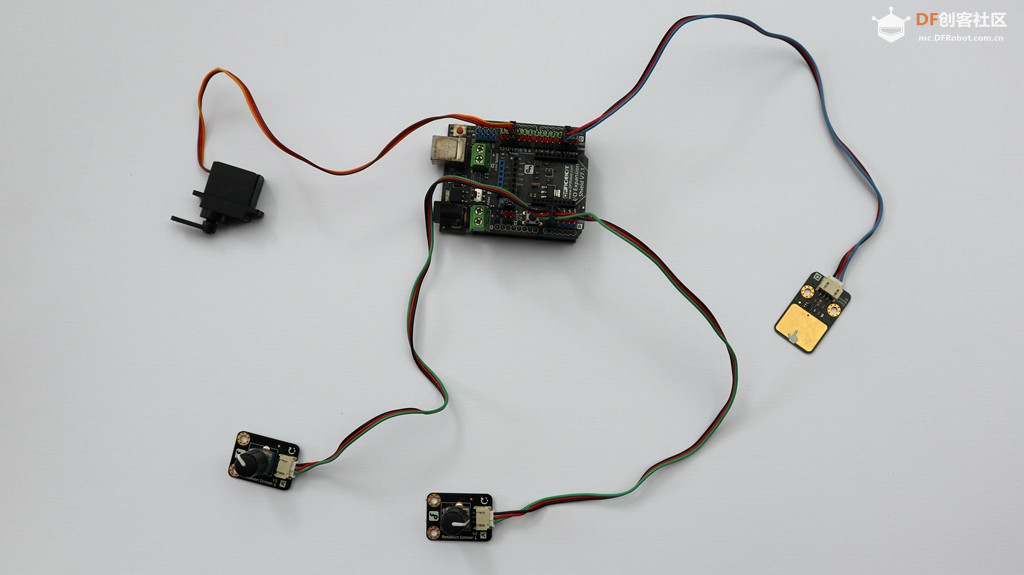 将IO扩展板安装到主控板上,再将其他电子材料连接到IO扩展的引脚上。触摸传感器连接到D2引脚,舵机连接到D11引脚,旋转电位器分别连接到A0、A1引脚。 二、编写程序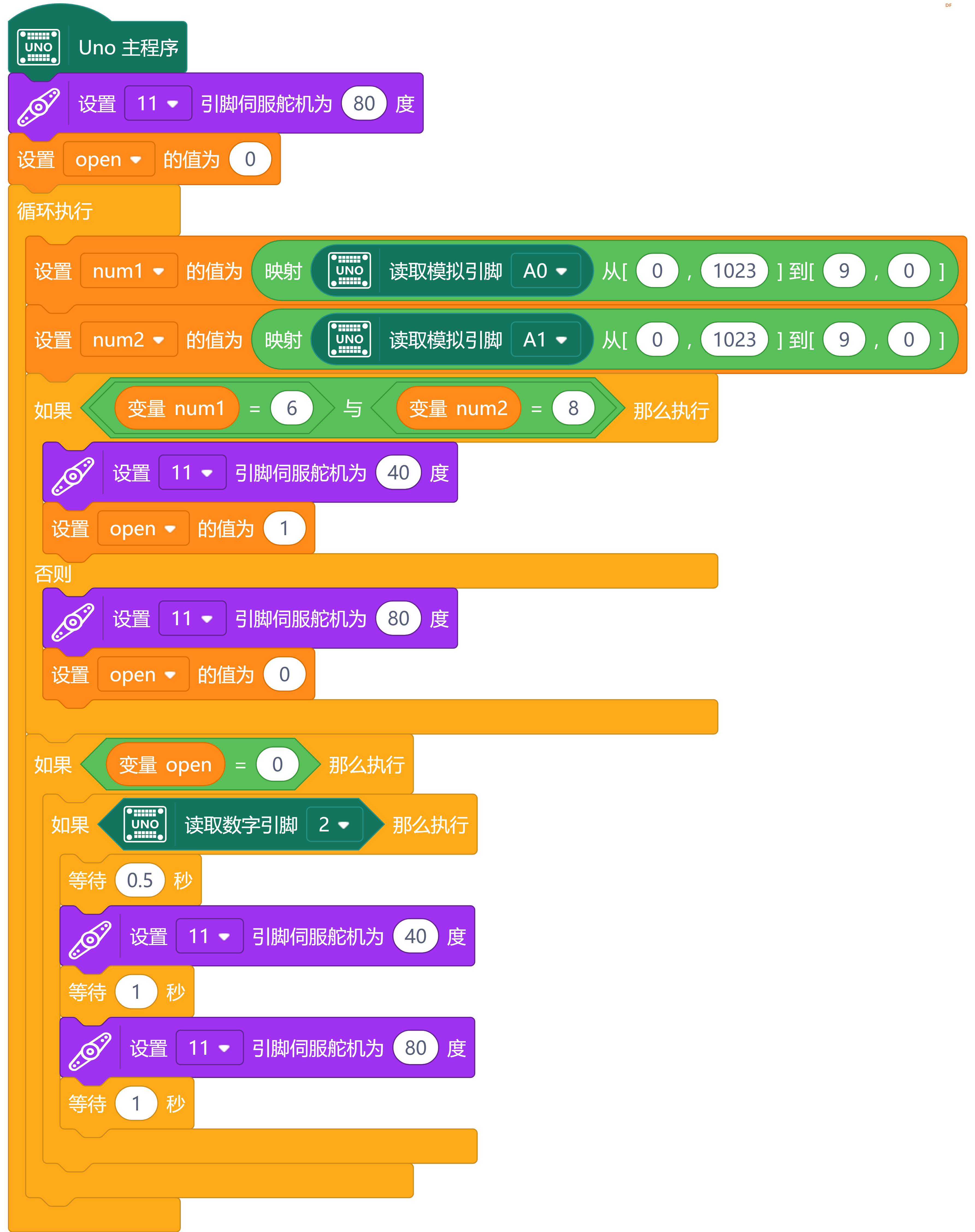 使用Mind+软件编写程序,其中舵机的角度设置仅供参考,需根据实际调试结果进行修改。将程序上传到主控板,初步测试没有问题后进行下面的工作。 三、结构设计、加工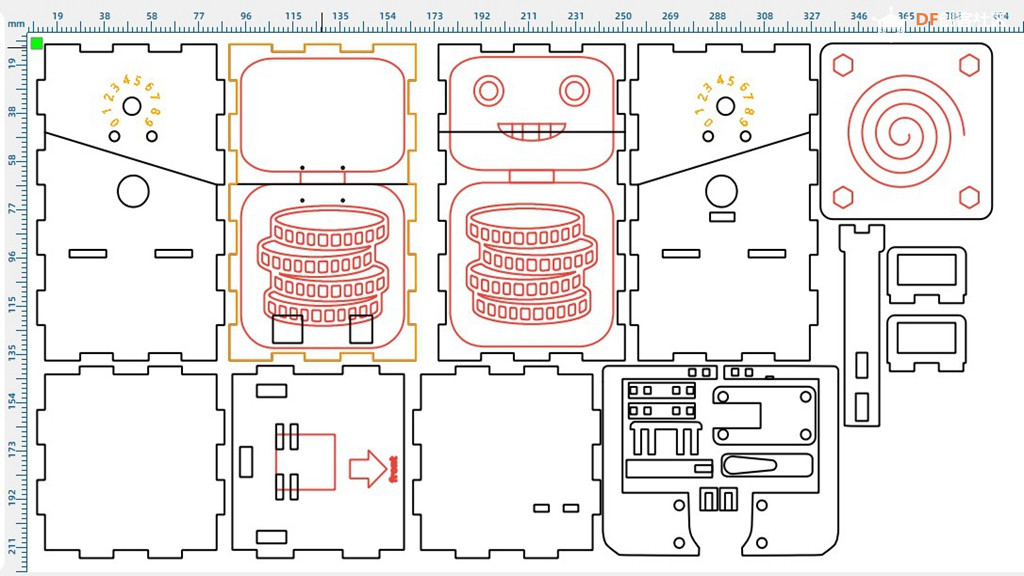 1. 使用LaserMaker软件进行激光切割建模。 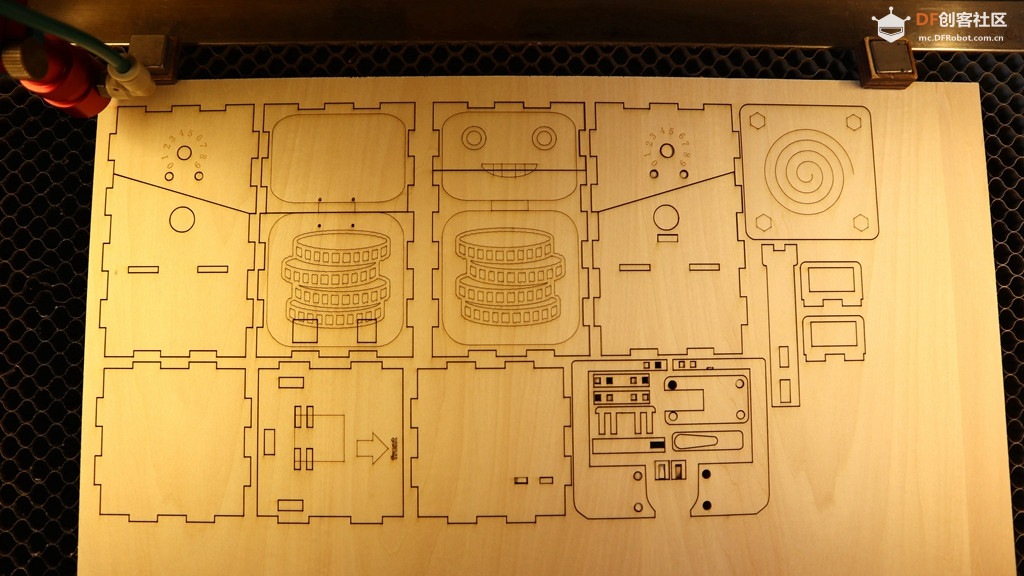 2. 使用激光切割机进行切割加工,使用的材料为3mm厚的椴木板。 四、组装成型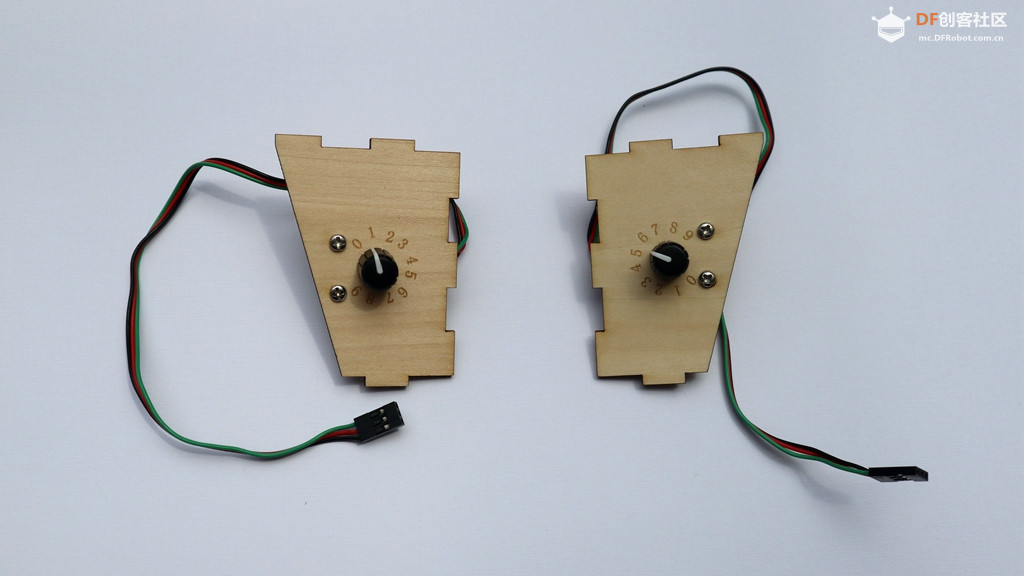 1.安装旋转电位器。 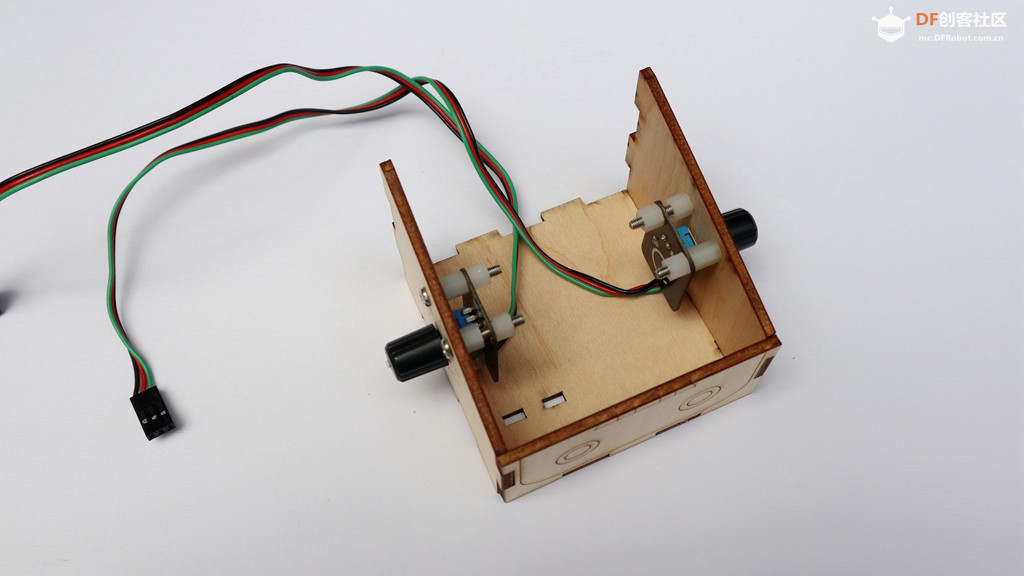 2.组装头部部件(4个面)。 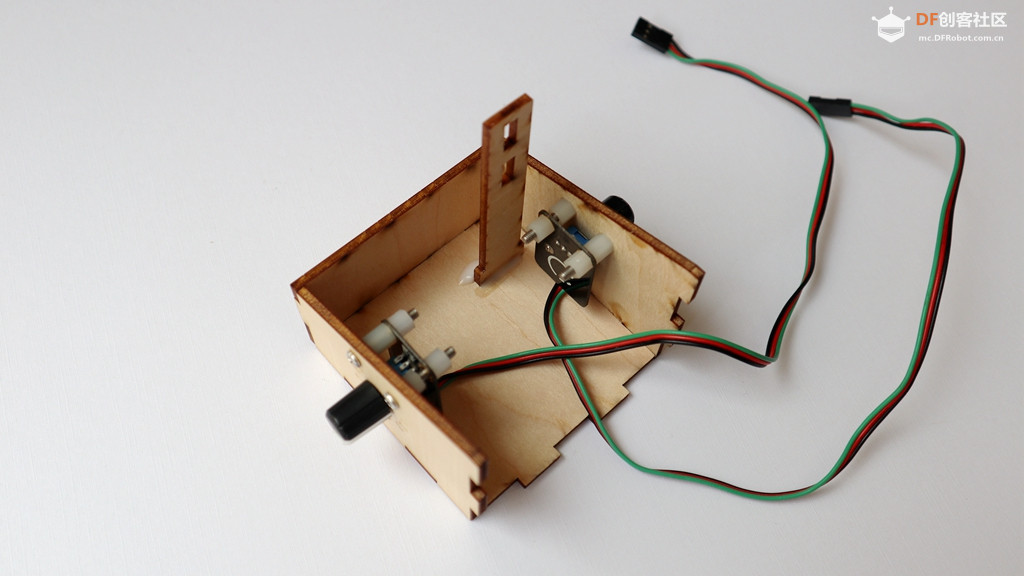 3.插上顶板连接件。 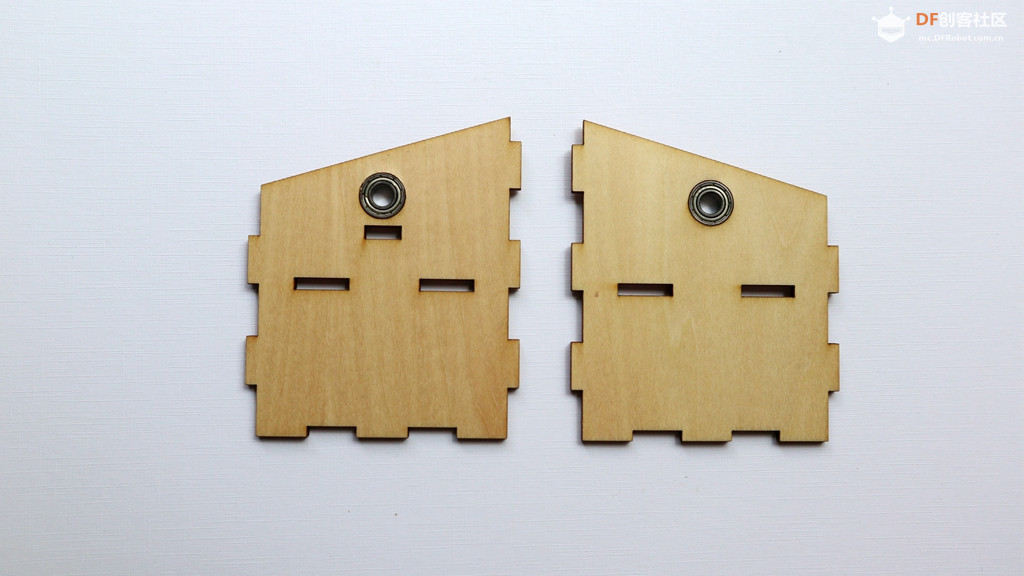 4.将轴承嵌入左右面板预留孔中。 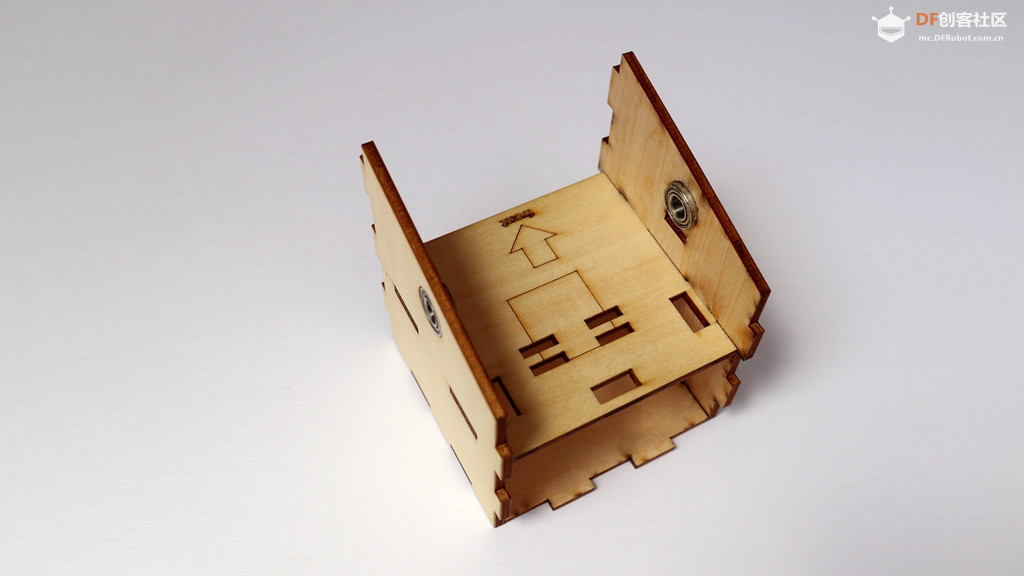 5.组装部分身体部件(3个面及隔板)。 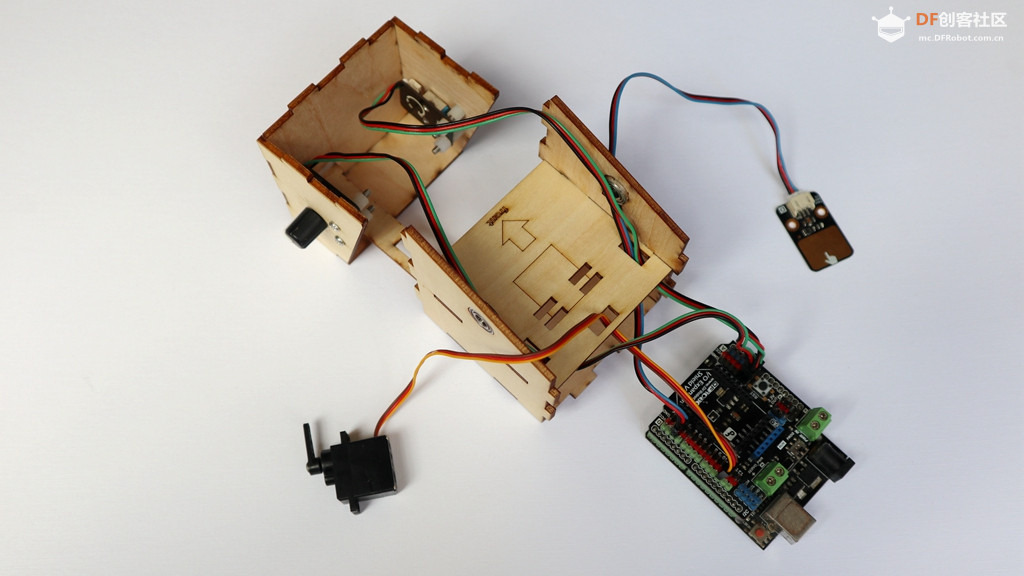 6. 重新连接硬件。 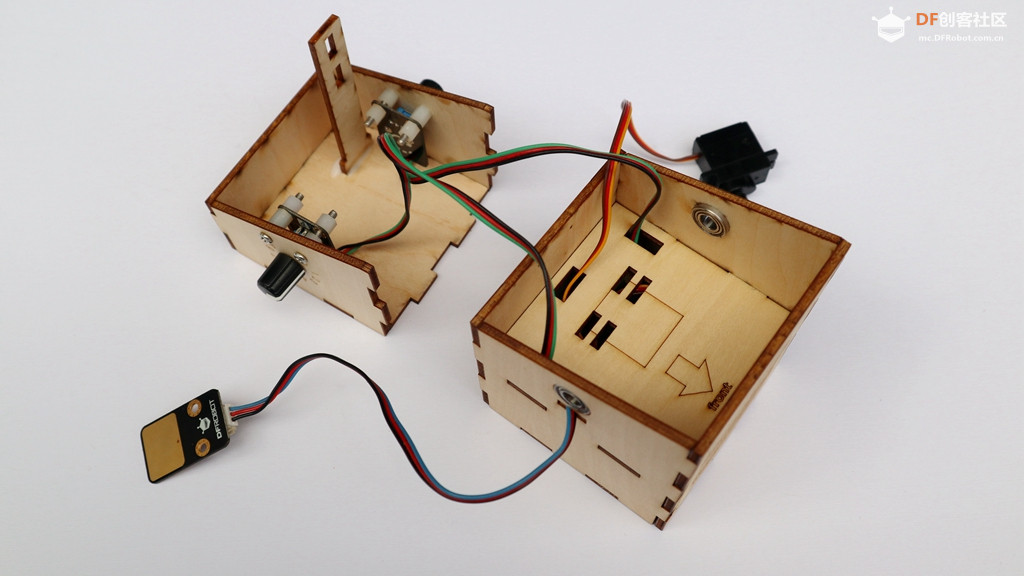 7. 将主控板装进身体下部,装上前后面板。 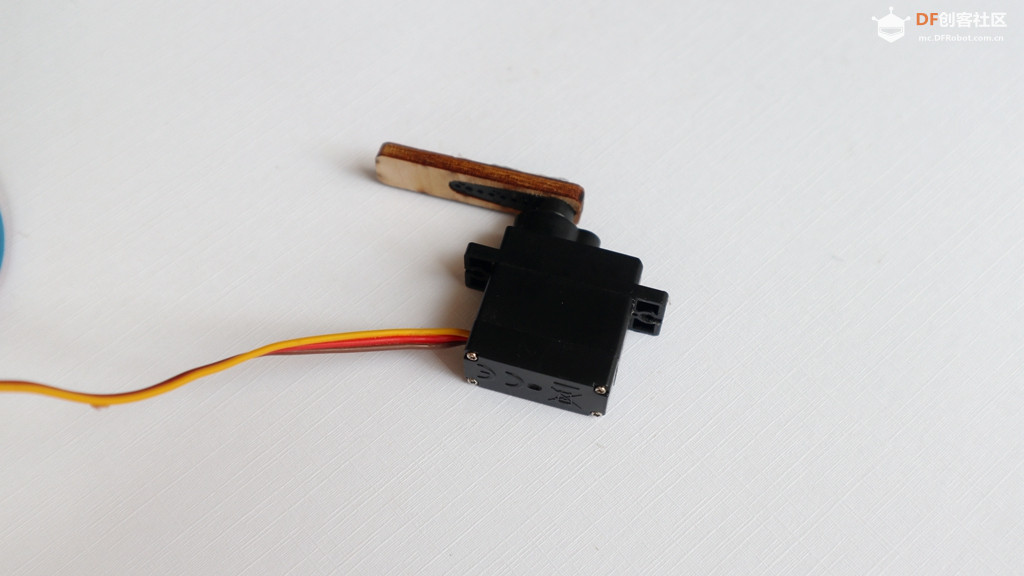 8. 将舵机舵盘与连接件粘结成一体(此状态下,舵机角度为90°)。 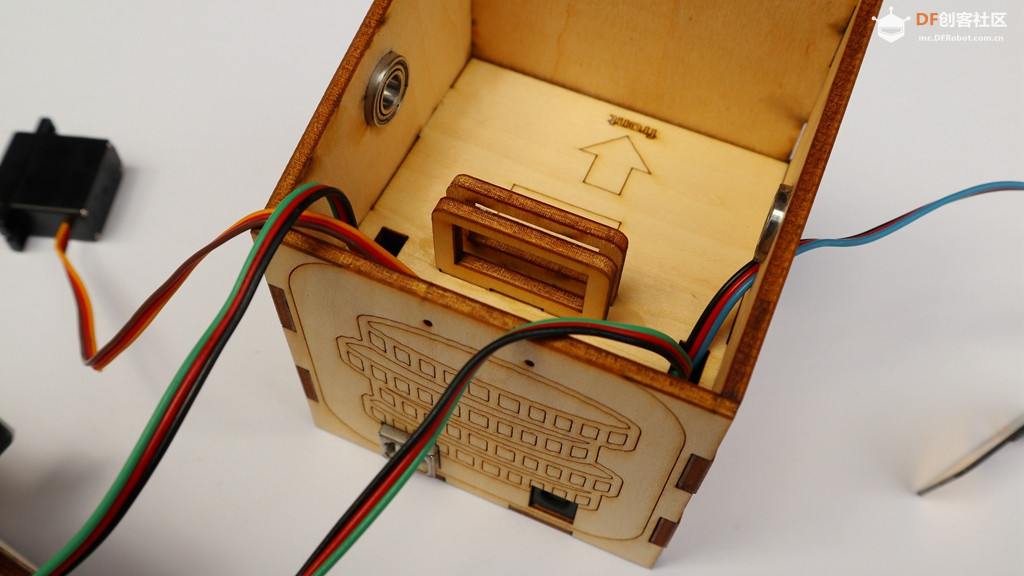 9. 将舵机固定件装在隔板上。 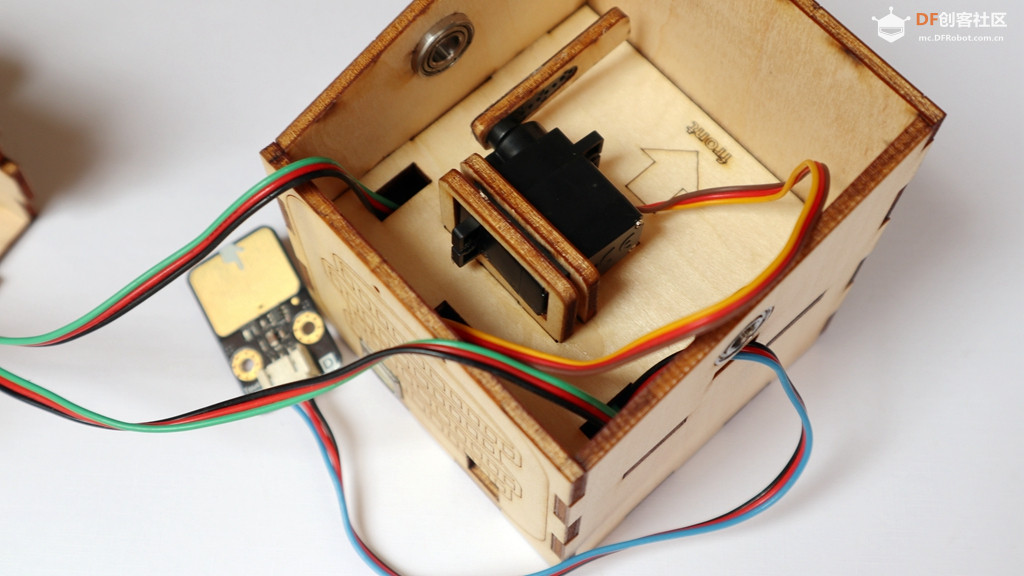 10.将舵机卡进固定件中,使用热熔胶加固。 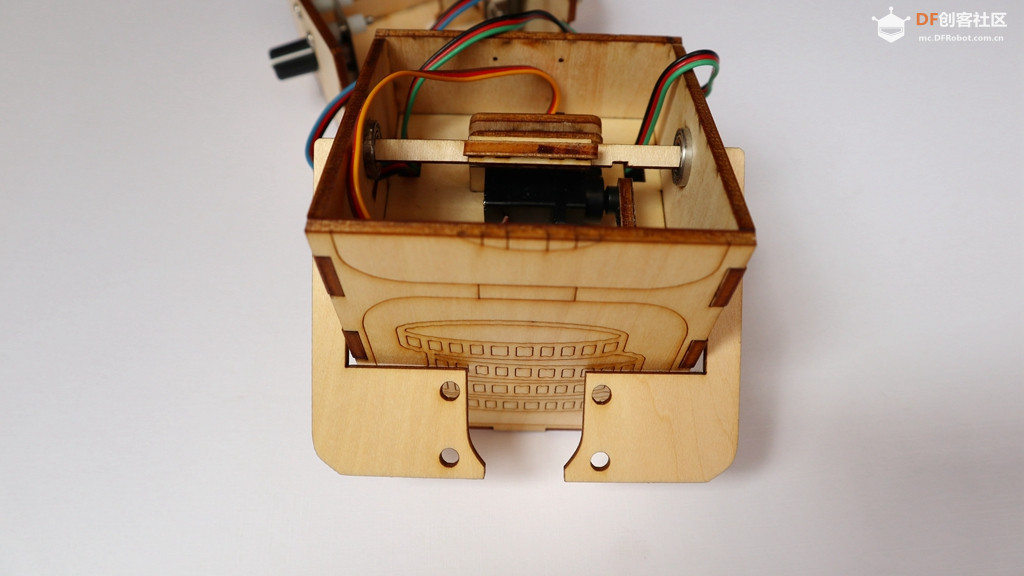 11.将两个手臂件通过轴承插入身体中,使用连接件连成一体。  12.使用螺栓螺母将触摸传感器安装到手臂件上。  13.在放置硬币处贴上铜箔胶带,遮盖触摸传感器。 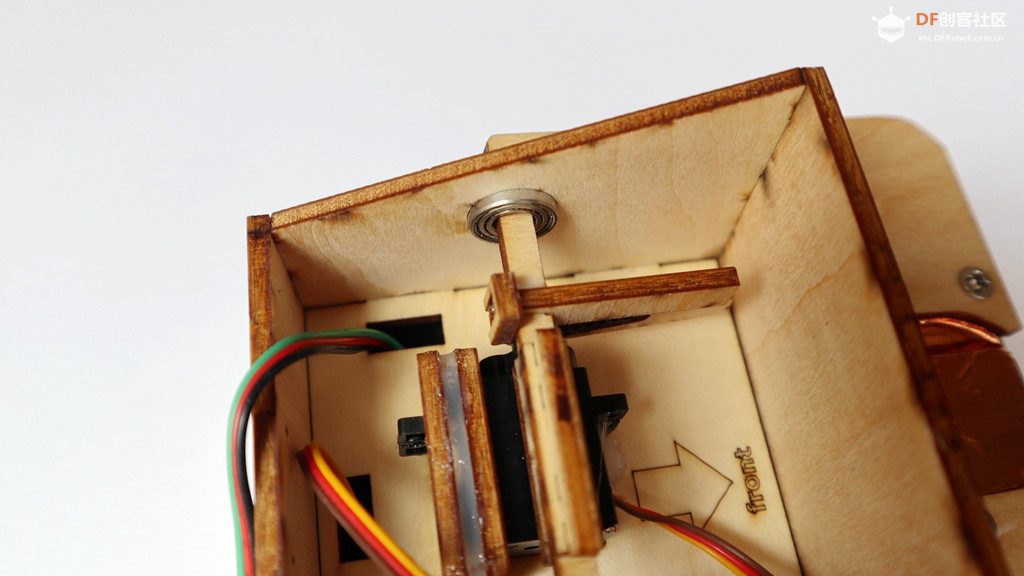 14.装上手臂连接件。 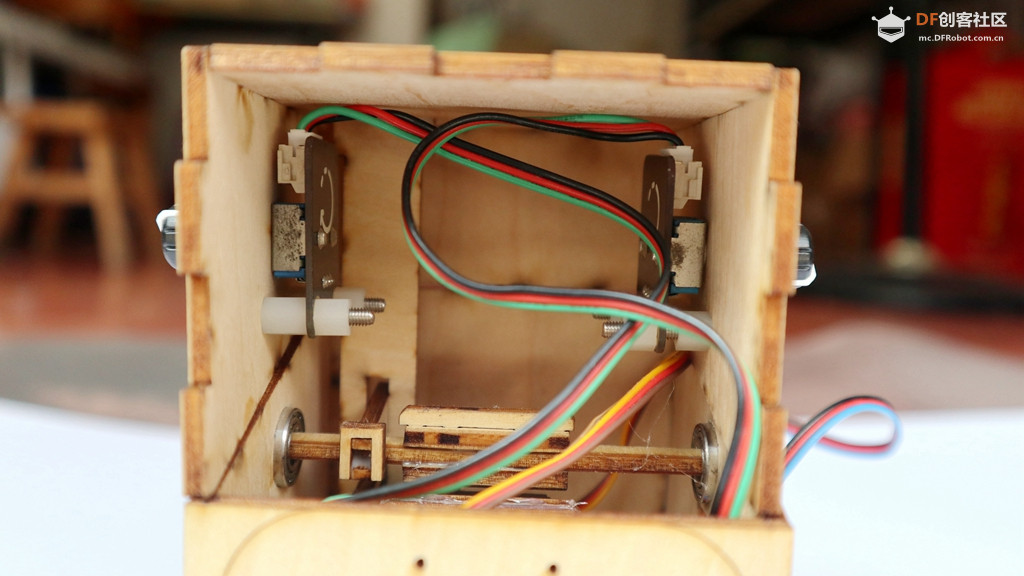 15.将舵盘连接件和手臂连接件穿入顶板连接件中。 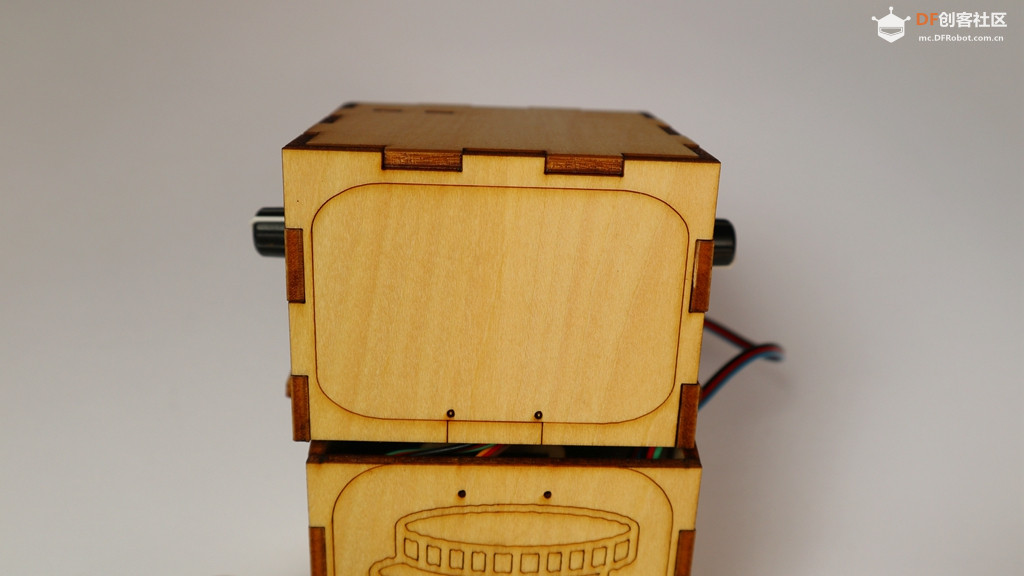 16.装上头部后面板件。 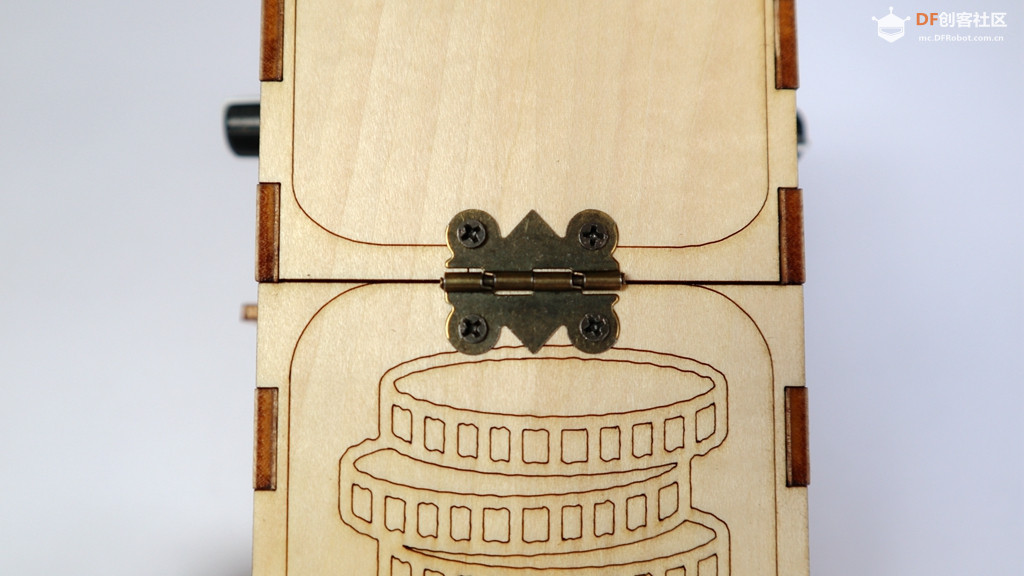 17.使用合页将头部和身体部分连接起来。  18.粘贴上头顶部装饰板。 五、通电调试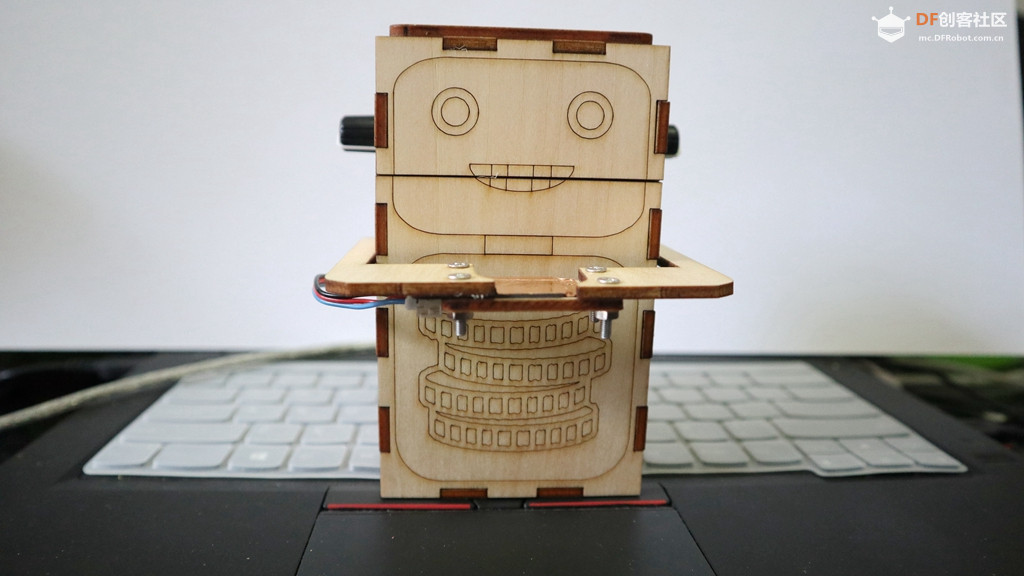 将组装好的机器接上电源,对各个预设功能进行测试。如存在问题,一般可从两个方向上寻求解决。一是在程序设计上,需要反复调整舵机运行时的角度参数和等待时长;二是结构设计上,可能需要修改连杆的尺寸和组合方式。 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







