|
4943| 2
|
#DFRobot2018 ADAS智能汽车自动驾驶构想 |
|
大家好, 很高兴能够参与tinkercad电子电路挑战赛。 我们是第23组参赛团队,由余昕熠(六年级),张仕捷(三年级),张筱羽(五年级)组成。研究的课题是 智能汽车自动驾驶构想,指导老师:薛佳俊 老师。 余同学负责电路编程,两位张同学负责建模部分。 随着汽车越来越普及,渐渐每家每户都将拥有自己的汽车。随着代步工具的升级,未来的汽车也将转型。我们看来,汽车转型的两大趋势:新能源 和 自动驾驶。 人类的驾驶方式: 输入部分: 1.眼睛捕捉前方物体、仪表盘、后视镜视野。 2.耳朵收集铃声等声音信息。 运算部分: 大脑根据收集的信息进行判断得出运算逻辑 输出部分: 1.手控制方向盘、转向灯、喇叭等。 2.脚控制油门、刹车等。 我们将人类的驾驶方式归纳成了三个阶段,分别对应编程中的三部分:输入、运算和输出。通过将这些步骤用自动的概念替代,实现智能自动驾驶的功能 第一部分:建模部分 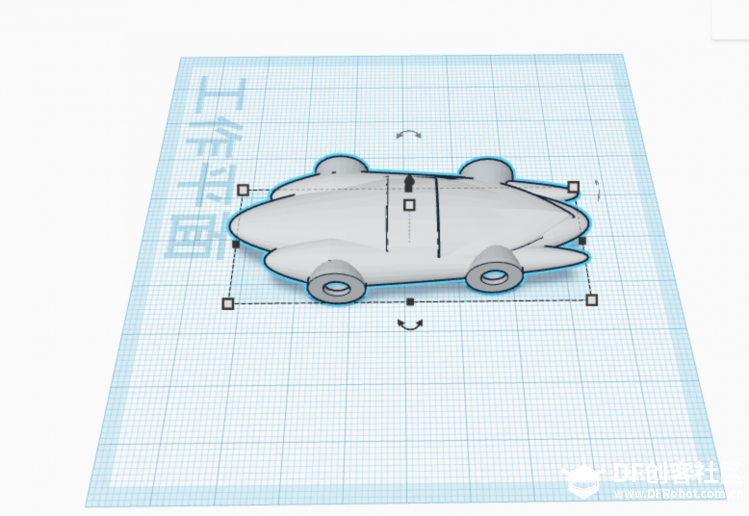 链接地址:https://www.tinkercad.com/things/4XRzO1KRWl1 我们设计的自动驾驶汽车以传统汽油车为原型加以优化改进。左侧是车头,右侧是车尾。要实现替代人类眼睛和耳朵等输入设备必然需要许多目标位置传感器,这些目标位置传感器需要高精度,且能在运动中有效识别不同种类的物体。比如行人、其他车辆、障碍物、小型可碰撞物体等等。不同种类的识别也相对应不同的运算和输出部分。所以我们在车头、车尾、左右两侧分别添加了传感器群,放置在前后凸起处及车身表面。同时整个车体做了无车窗设计。 整个汽车外部由钛合金制成,车顶部分钛合金可自动开启,里面一层为高强度钢化玻璃。当车顶钛合金全部打开,从里向外便能看到环境全貌,且自己身处透明的钢化玻璃中,十分安全。既是自动驾驶汽车,自然解放了双手和双脚,在车内设计的乘客为卧姿,躺在车里,同时设计了VR舱,在乘车期间,可以置身于虚拟环境中学习、交流或是游戏。卧姿的设计同时也能进一步利用空气动力学,降低汽车的阻力,从而增加了动力系统的利用度。 第二部分:编程部分 链接地址:https://www.tinkercad.com/things/kdQoUXJR2nG 如图所示: 我们的输出单元:左右各两个电机。左右电机匀速旋转=直行,左电机旋转,右电机静止,则右转。左电机停止,右电机旋转,则左转。左右电机静止,则汽车静止。 我们的输入单元:三个目标位置传感器(Arduino中利用3个测距传感器替代) 运算单元:编程部分 在实验中,我们这样编程: 当前方的测距传感器检测出2米无物体,则车辆正常行驶。 当前方的测距传感器检测出2米内有物体,且左侧测距传感器检测出2米内有物体,则车辆右转 当前方的测距传感器检测出2米内有物体,且左右两侧测距传感器检测出2米内都有物体,则车辆静止。 以下是模块的编程截图 后话: 我们在此次项目中简单模拟了自动驾驶的逻辑,但是受限于目标位置传感器无法进行模拟,而是使用了测距传感器替代。在将来我们的生活中会有非常精确的目标位置传感器存在,会帮助我们更好的判断其他车辆或者物体的出现。另外车辆的转弯逻辑也可以通过更加先进的方式来实现,这是未来该项目可优化的思路点。 随着5g时代的临近,使大数据与物联网逐渐走入我们的生活。通过交通的云计算,我们可以为车辆实现自动导航、自动规划以及不同车辆间大数据的自动交互。这些都能很好的是我们的自动驾驶系统优化提升。最后感谢团队中的每一位队员,为该项目付出了很多。 谢谢大家! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







