|
15650| 2
|
[HCRbot系列教程] HCRbot 系列7──启动 HCRbot 机器人 |

|
这篇是 HCRbot 机器人系列的第 7 篇,经过前面章节的介绍,HCRbot 机器人的软件部分都已经设置完成啦,接下来这一章节就可以介绍如何控制 HCRbot 机器人的运动了。 下面是目前已经写好的所有篇章链接:
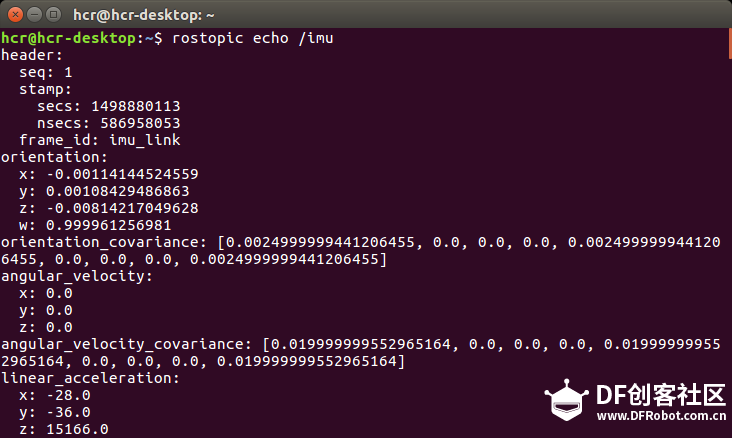
测试以上所有步骤都完成后,我们的 HCRbot 就可以启动啦。在正式玩各种好玩的功能前,我们先测试一下。 轻按 OpenCR 上的 SW1 按钮,看看 HCRbot 是否会前进1米;然后再轻按 OpenCR 上的 SW2 按钮,看看 HCRbot 是否会旋转180度,如果都没有问题的话,那么恭喜你,HCRbot 可以运行啦。 启动 HCRbot[Remote PC] 运行 roscore: [HCRbot] ssh 进入 HCRbot 机器人,开启 HCRbot 机器人: hcr_robot.launch 文件中,主要运行了与 OpenCR 串口通信的节点,以及速度控制命令相关的节点。 [Remote PC] 在上位机上查看是否有 IMU 的返回数据:
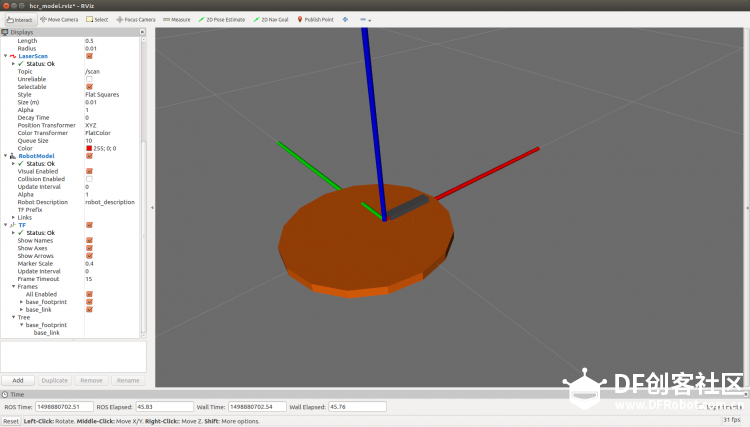
可视化为简化 HCRbot 在 ROS 中的 URDF 建模,在 hcr_description 包中,只建立了 HCRbot 的简单模型,URDF 文件按中只包含了 base_link 和 base_footprint 的 tf 关系。查看 HCRbot 模型方法很简单: [Remote PC] 在远程主机上打开 Rviz 可视化界面:
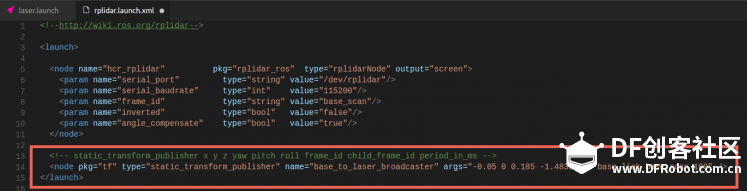
其他传感器的 tf,包括 Kinect、R200 和 RPLIDAR 等,都在相应的 launch 文件中,手动通过 static_transform_publisher 来发布,接下来会介绍。 启动 HCRbot 上的传感器[HCRbot] 启动 RPLIDAR A1/A2 激光雷达: 如下图红框中为 tf 发布的 RPLIDAR 激光雷达在 HCRbot 上的坐标转换关系,即为 RPLIDAR 激光雷达在 HCRbot 的上位置,大家可以根据自己的安装位置自行修改。
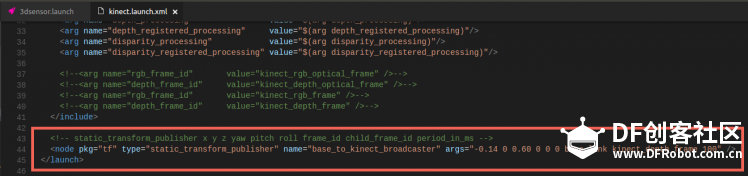
[HCRbot] 启动 Xbox 360 Kinect 深度摄像机(默认): 如下图红框中为 tf 发布的 Kinect 深度摄像头在 HCRbot 上的坐标转换关系,即为 Kinect 深度摄像头在 HCRbot 上的位置,大家可以根据自己的安装位置自行修改。
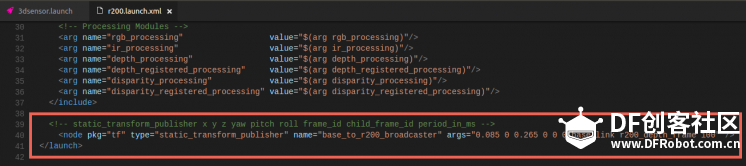
[HCRbot] 启动 RealSense R200 深度摄像机: 如下图红框中为 tf 发布的 R200 深度摄像头在 HCRbot 上的坐标转换关系,即为 R200 深度摄像头在 HCRbot 上的位置,大家可以根据自己的安装位置自行修改。
自定义传感器正如介绍章节所说,HCRbot 项目采用模块化设计的方案,大家可以自行添加其他传感器。 比如,你用的其他的激光雷达,你只需要在路径 hcr_bringup/launch/includes/laser 下新建一个 $[laser_name].launch.xml 文件,其中 当你想要使用 lds 激光雷达时,只需要在 Terminal 中输入如下代码: 或者直接在 ~/.bashrc 文件中修改 HCR_LASER_SENSOR 参数为 lds。 视觉传感器也类似,只是文件路径为 hcr_bringup/launch/includes/3dsensor。可以参考该文件夹下的 kinect.launch.xml 和 r200.launch.xml 文件,不再赘述。 参考资料
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 老版主限定
老版主限定
 创作达人
创作达人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






