|
4211| 0
|
使用测评报告——人机大战之猜拳 |
首先,还是我想得简单了,URM09超声波虽然做工精致,但和我们平时用的还是有很大区别的,这做好的孔洞完全用不上,本来还想着直接替换就可以了,线都插好了,才发现对不上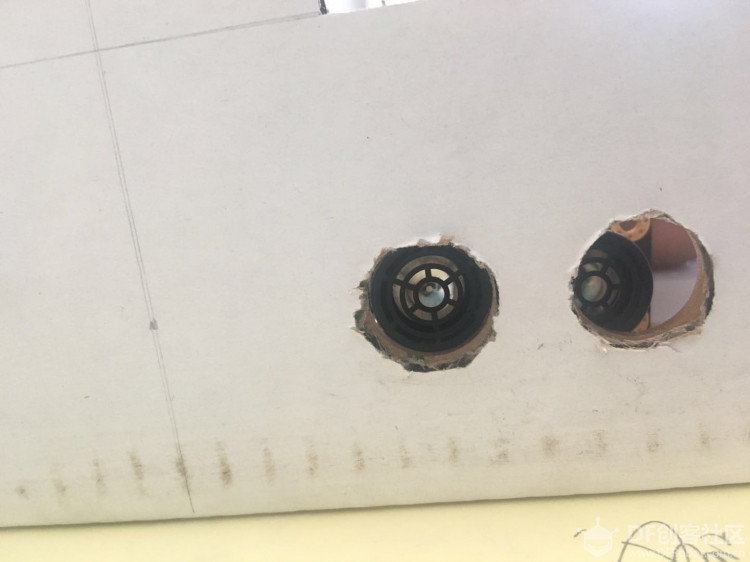 两个超声波对比图(稍微有点小失望,如果可以孔距相同就好了,可以无缝隙替换)。 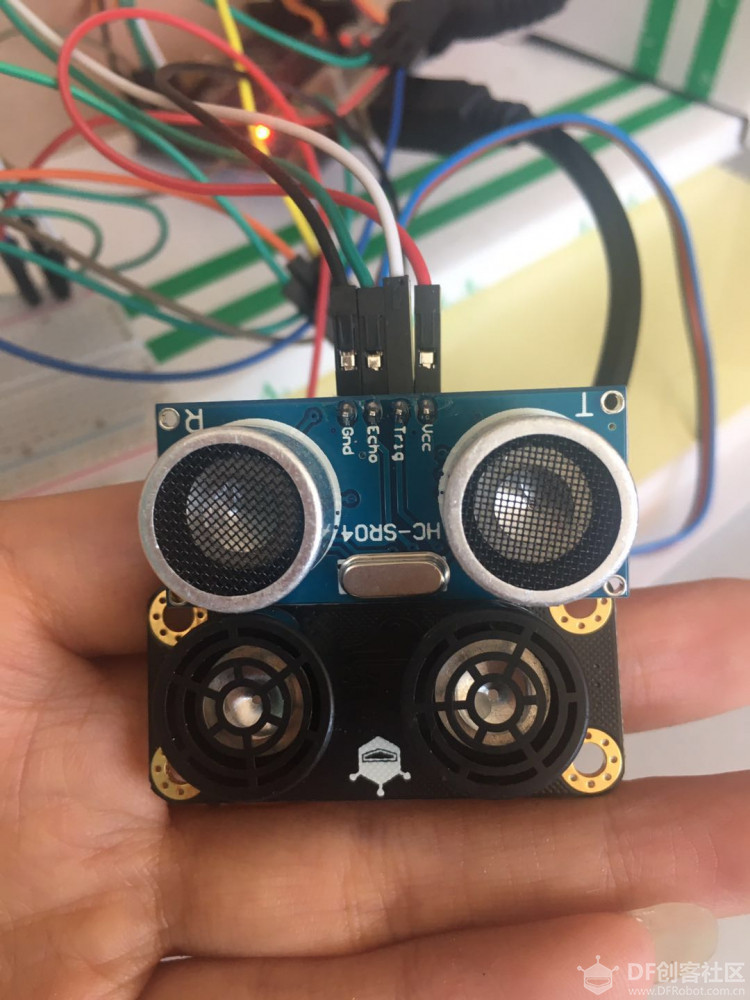 2.实际测评 我用的Arduino UNO板子,米思奇软件,先串口打印数据(起先我还愣了一下,之前一直用普通的超声波传感器,顺手就把超声波模块命令拖出来了,用的时候才感觉不对,仔细看了下才反应过来,哦,只用一个模拟输入口就可以了,我这惯性思维还是很严重的) 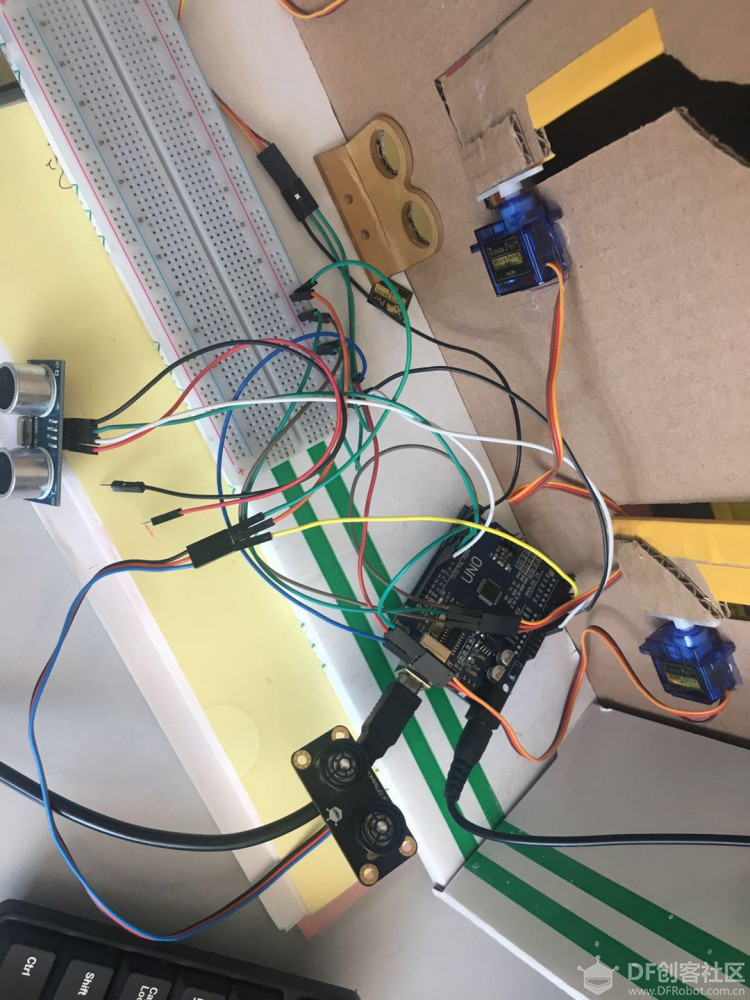 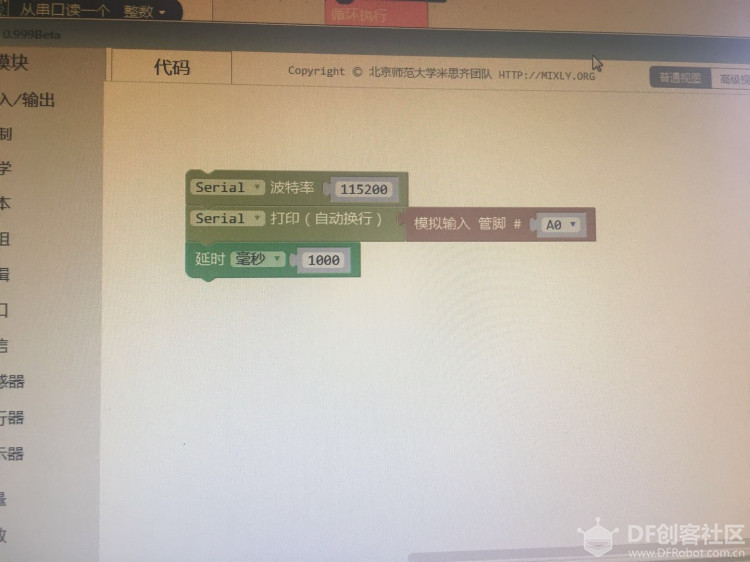  开始是拿在手里的,感觉自己没动,可出来的数据波动还是比较大的,从1、2直接跳到300多,然后是50、60……    总感觉哪里不对,然后考虑是不是因为在手里,不自觉得手抖动有影响,所以放在桌子上,重新测试 这次感觉挺好 3、实际应用 这是学生之前做的一个实例,用超声波测距,如果小于10,就随机触发3个舵机中的一个转动,感觉像人机猜拳一样,不过好像替换以后,效果不是很好,不知道什么原因,那2个舵机总是抖动,用之前那个没出现过这情况,具体原因,还需要我再一点点尝试、检查一下。 所以,后续如果有结果了,再出贴子更新。 以上,是我这次的一个简单使用测评, 总结一下:1、希望可以和HC-SR04孔距相同,实现两个传感器的自由替换。 2、使用的时候感觉还是静放下,数据更加准确一些,拿在手里的话,数据跳动还是蛮大的(当然也不排除我操作时有问题,之后会继续尝试,继续找问题,还是到底什么原因) 3、实际应用还是很灵敏的,还有就是一要模拟线就可以完成,很方便,简单,学生更容易接受。 套件来源:DFRobot创客商城 产品购买链接:点击查看 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 志“童”道合
志“童”道合






