|
11682| 11
|
[已解决] 威龙驱动器 |
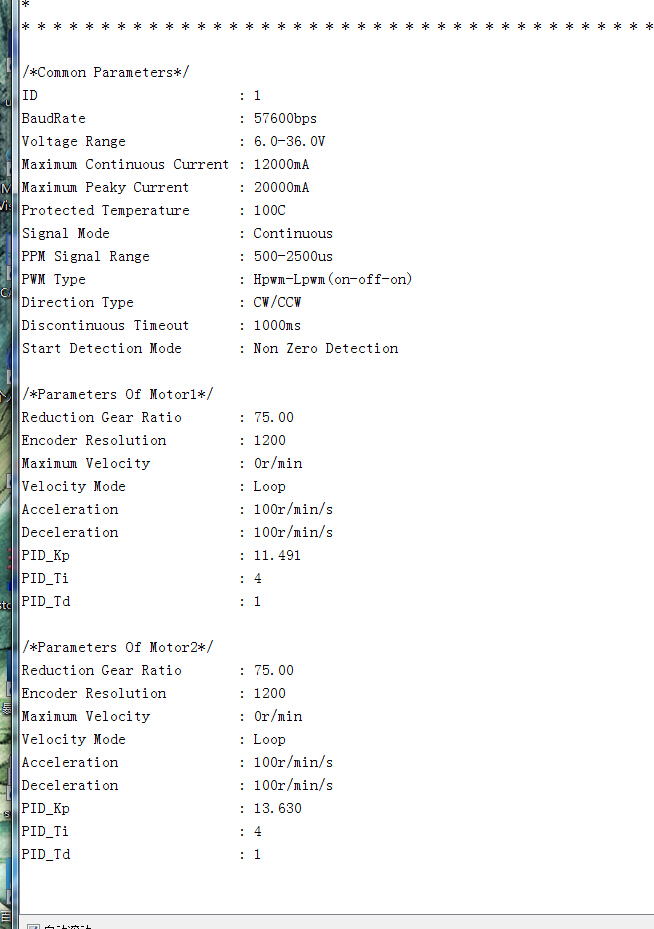
本帖最后由 Youyou 于 2014-8-14 13:18 编辑 ejiyuan1 发表于 2014-8-14 09:02 电机带负载后,控制器会通过加减速的控制来读取编码器反馈,从而自动匹配出一个PID参数, 将DI先设置为0,然后光调节P。到一定数值的时候,会有振荡出现。具体表现就是电机一转一停,如果不加D参数, 光用pi参数,就将真实的p变成0.45刚才的记录值。 然后 i值=1.2 p/ Tc Tc是振荡周期。 如果是pid三个都有, 那就用下面的公式 p=0.6(Pk) Pk是刚才的振荡阀值 i=2*p/Tc Tc是振荡的周期 d=p*Tc/ 8 具体的请参考下威龙控制器的教程的闭环控制部分。 |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶