|
18950| 11
|
DIY项目:废旧玩具车大改造! |

家里大扫除,清理出来了好多我之前玩的玩具还有杂物之类的,家人觉得没啥用了就准备扔掉,幸好我眼疾手快,从垃圾堆中抢救出来了一个小的玩具车。 翻个面,发现车底有安装电池的位置,于是屁颠屁颠下楼买电池,准备安上试试。  装好电池,打开开关,车子不动。。。  是不是哪里坏了?拆开看看 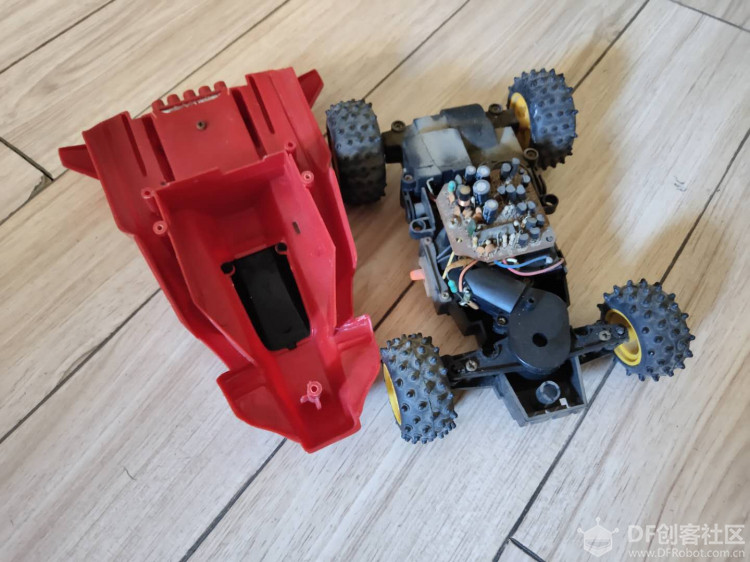 目测这个应该是遥控车。。。 于是回头一顿翻找,要说长的像遥控器的,我直找到了这个。。:  这下遥控器估计失踪了,所以现在这个车没法控制。 遂仗着自己单片机的半桶水知识,决定改造这个遥控车。 看看链接电路板的线,好像也没几根,这个电路板肯定是不能用了,所以直接把线剪掉。 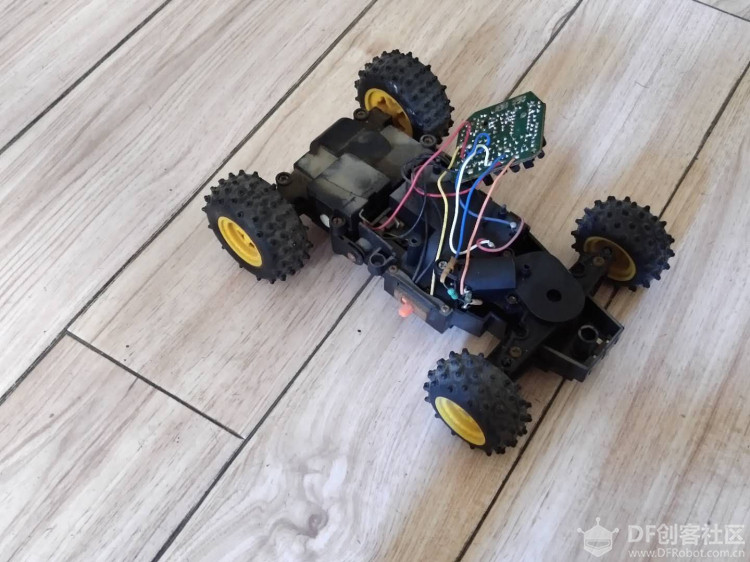 但是问题来了,发现链接着后面驱动齿轮箱的有两根线,不知道哪两根是驱动电机的,为了搞清楚方便后面改造,遂拆之。  看清楚了,明显右边两根是嘛,剪掉!  下面开始 改造,首先清理清理杂乱的工作台(书桌)  清理好了,好像并没有干净到哪里去。。。  拿出遥控车,首先拆解,得到如下部分! 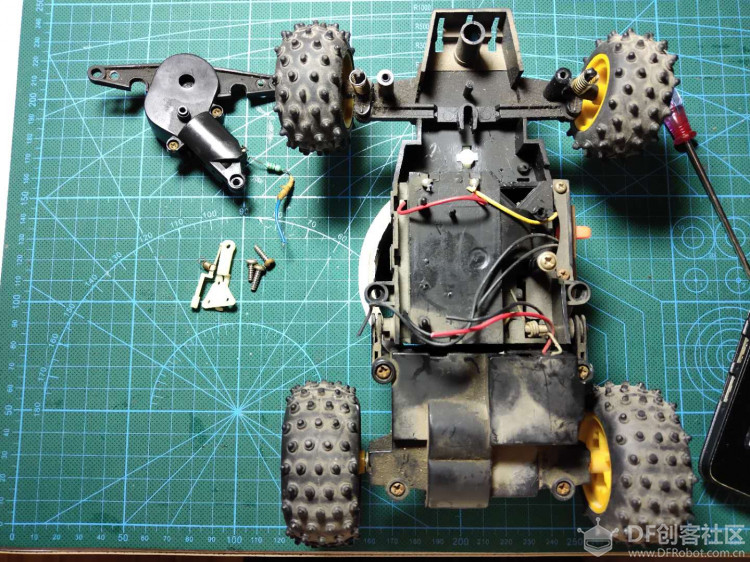 那么首先改造转向部分,拿出一颗来自TOWER PRO的9克舵机 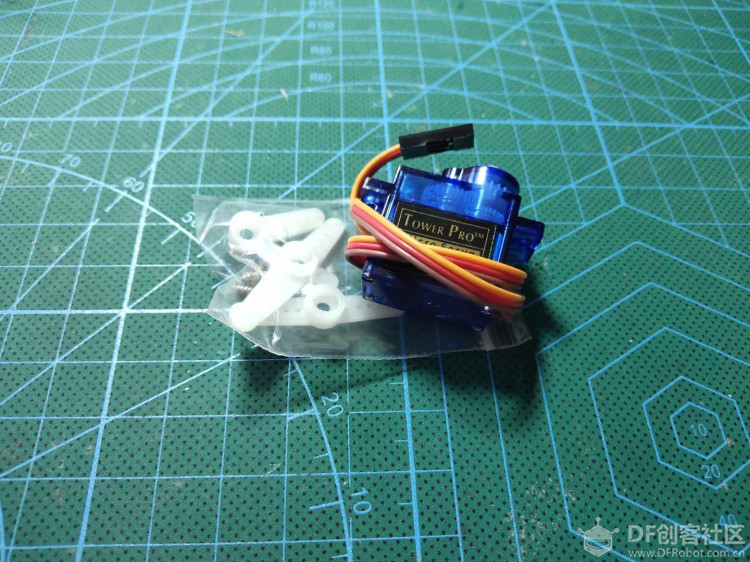 稍微的修建舵机的摇臂,使其完美嵌入到转向臂的缺口里 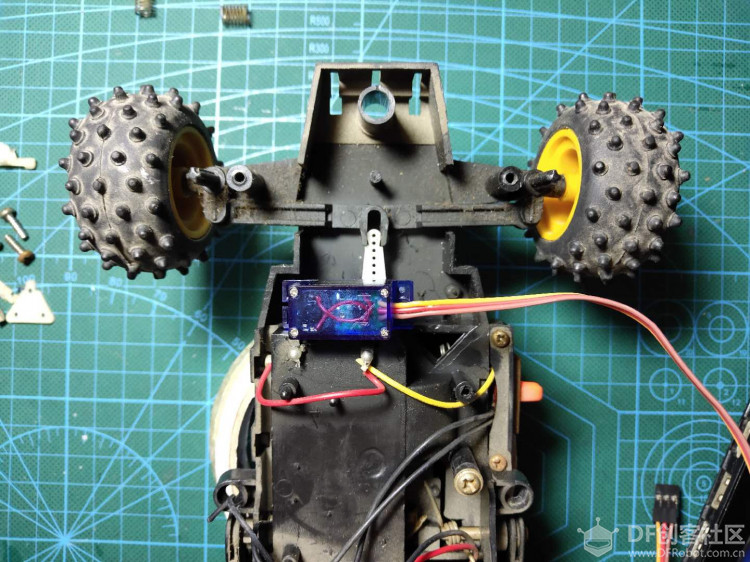 注意现在只是假组(假装组装好了,给制作者一种心理上的满足感),不要用胶水把舵机固定死了,因为舵机出厂时候可能不在正中央的位置,需要给舵机通电后舵机找中位! 下面拿出拆下的转向机构上固定板(应该叫这个名字)  拦腰截断,只留下前面一点用作固定转向轮使用。  安装上去,新鲜假组照奉上! 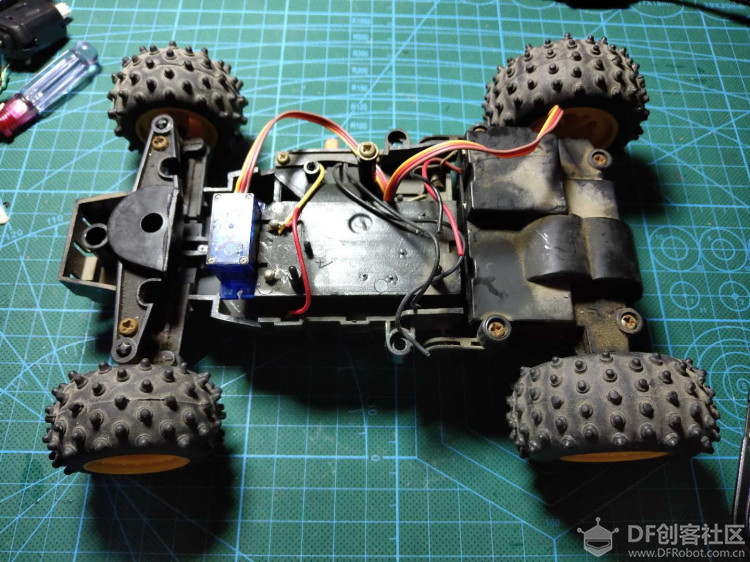 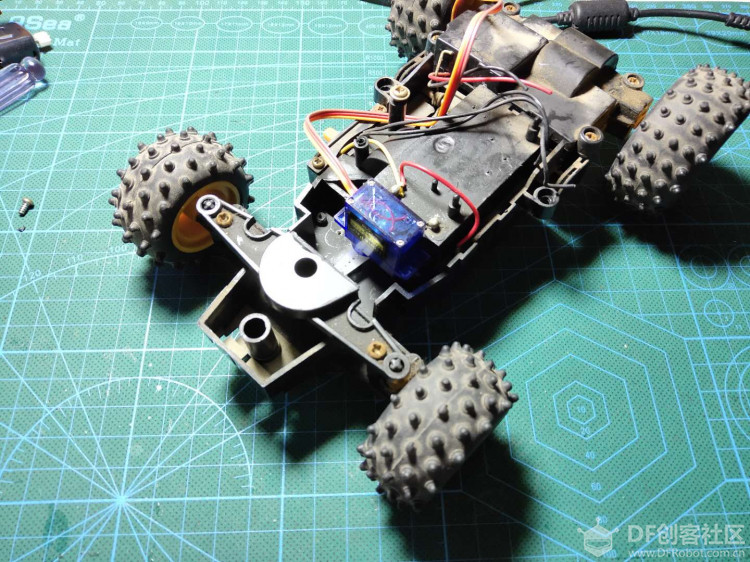 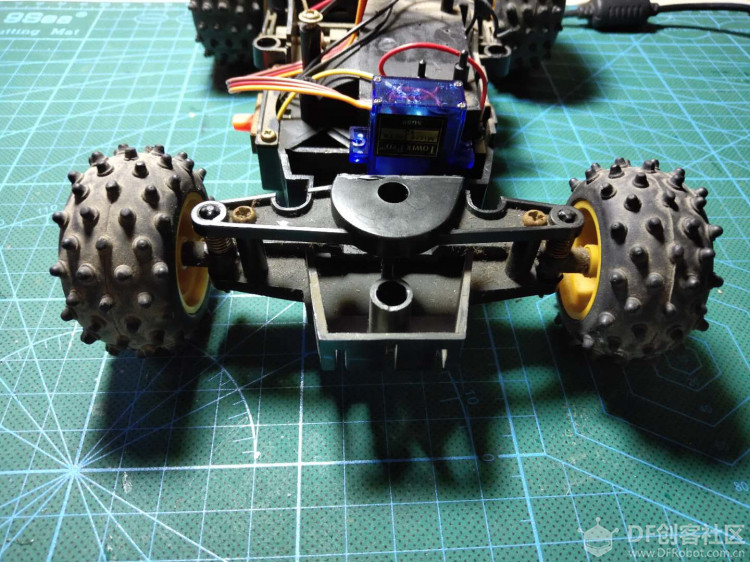 转向机构改装完成,下面开始电路设计焊接! 头脑风暴了一下,绘制了两张电路图,遥控器端的: 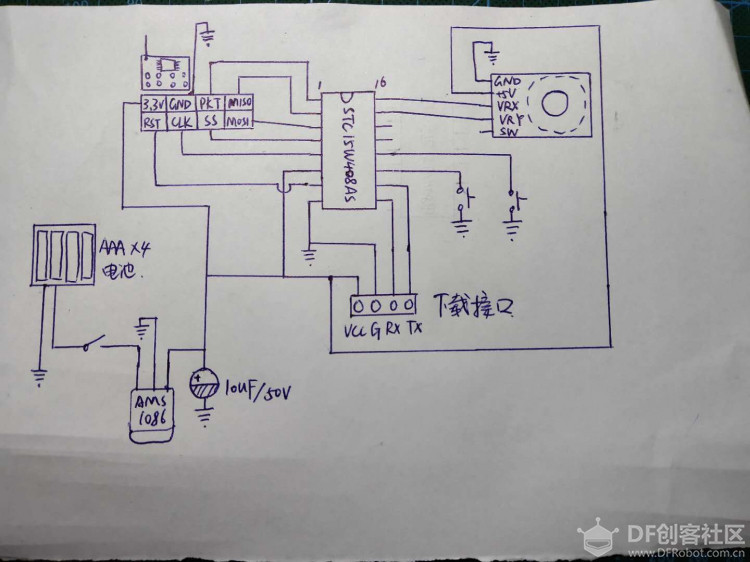 还有接受端的 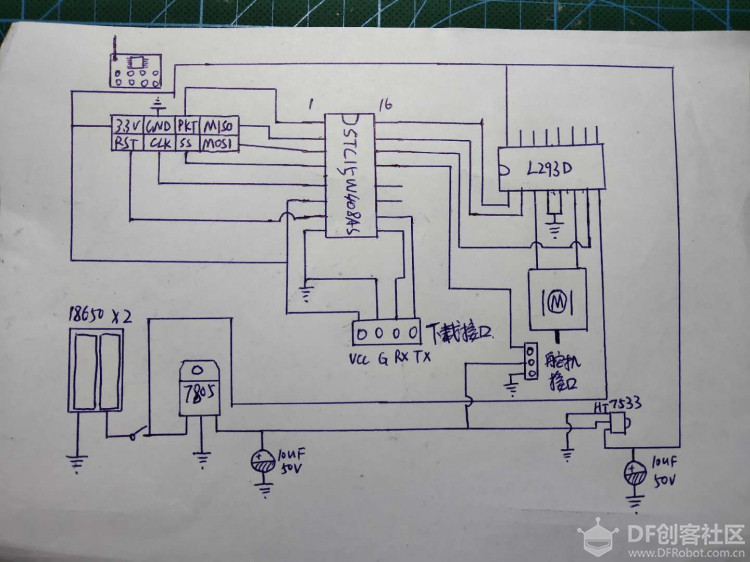 拿出需要的元器件: 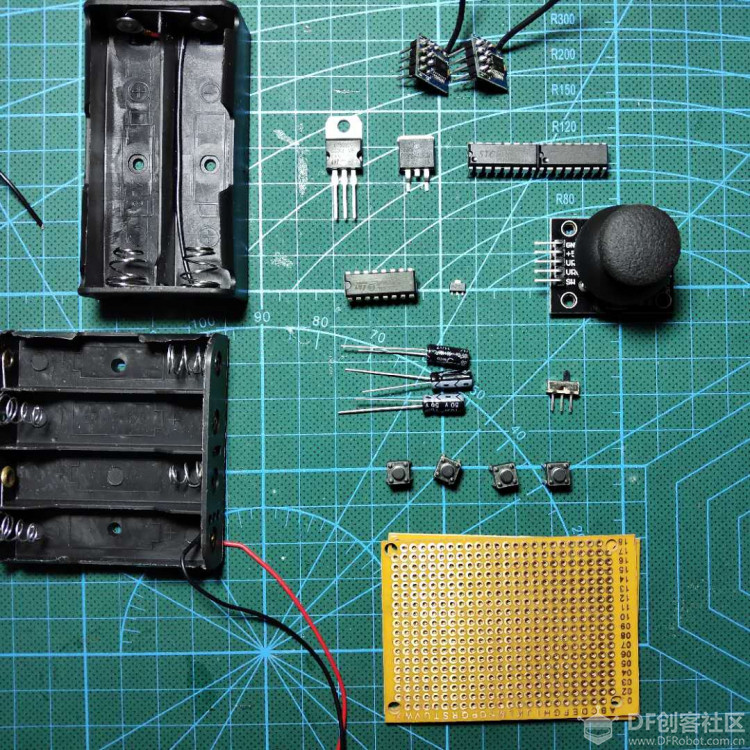 开始焊接遥控器 首先固定好摇杆的位置以及单片机的位置,选择合适的位置焊接往往可以简化走线以及节省焊料,最恰当的方式是将单片机放在板子中间 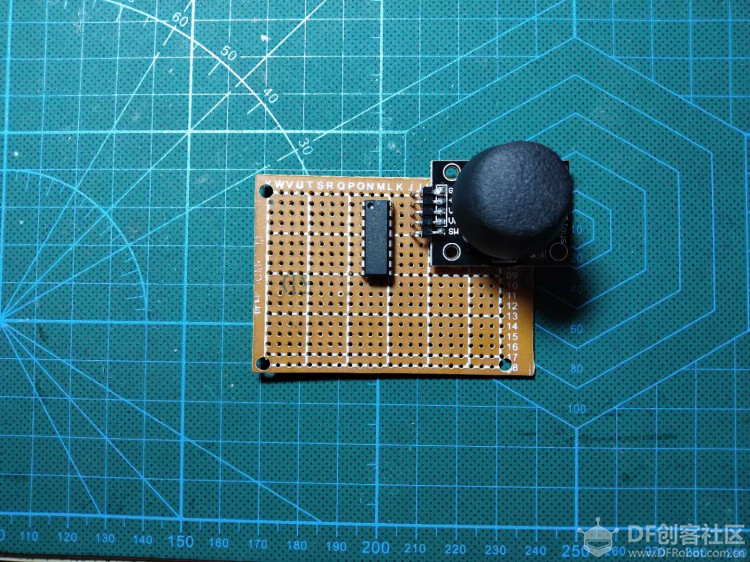 焊接好单片机以及摇杆之后,难度最大的部分就完成了。眨眼之间,剩下部分的焊接完成:  背面 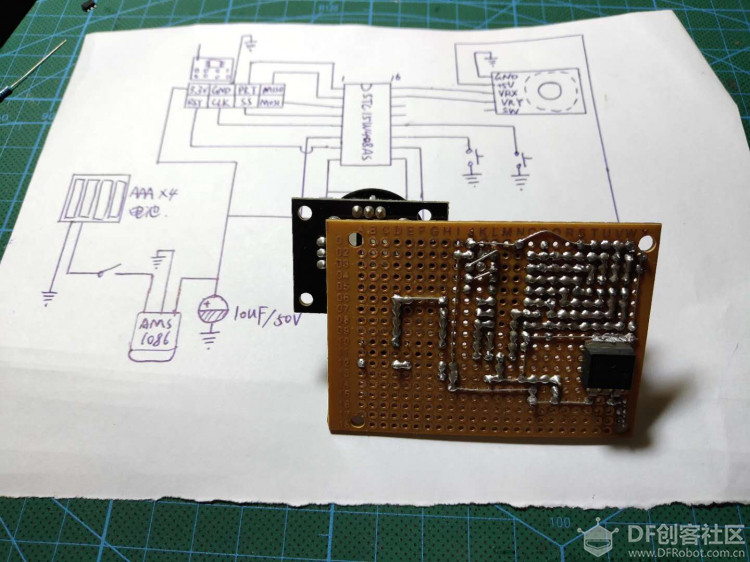 链接电池盒 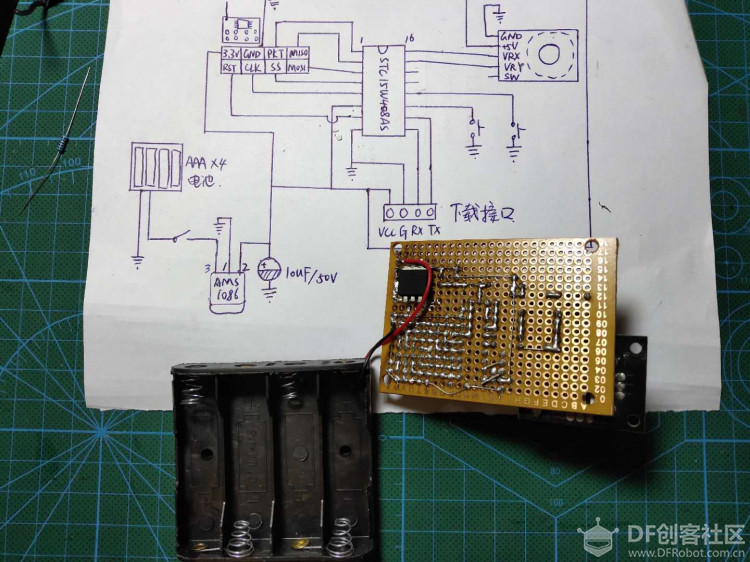 使用3M胶粘贴电池盒至电路板背后,组装完成 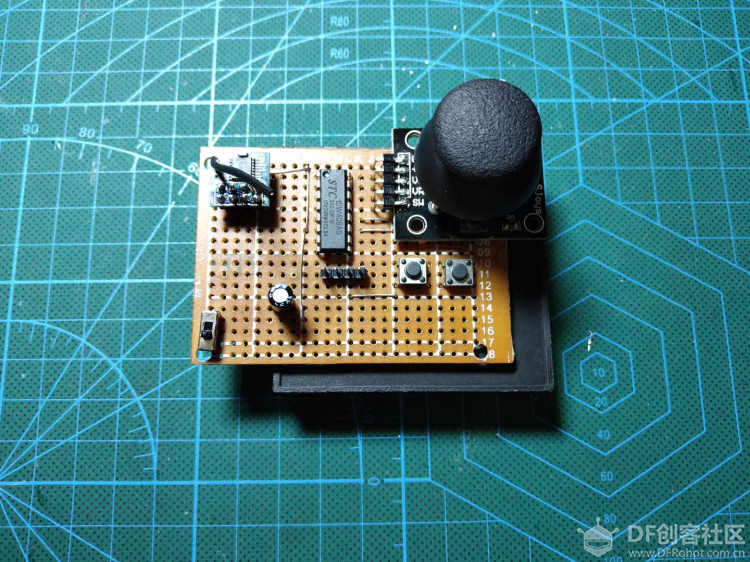 下面焊接接受端电路板,按照我设计的电路图焊接,非常的方便。 焊好了,左边到右边依次是:无线模块,单片机,电机驱动模块以及右下角的稳压模块 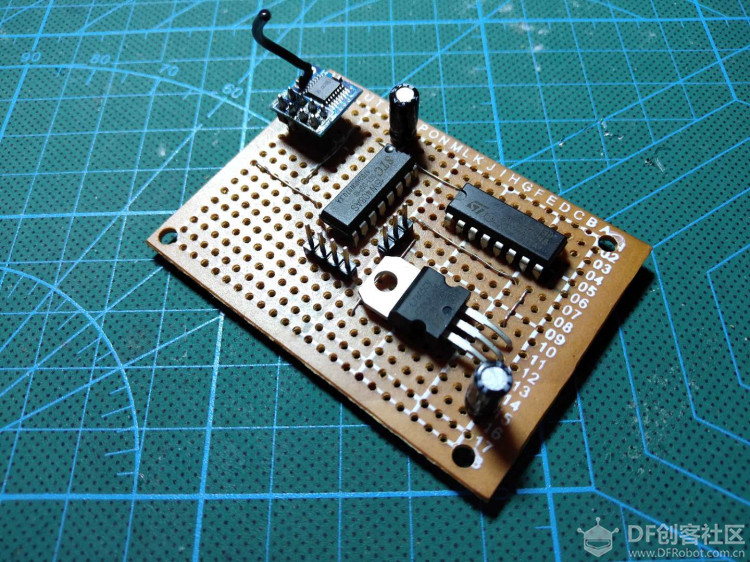 把驱动电机的电源线焊上 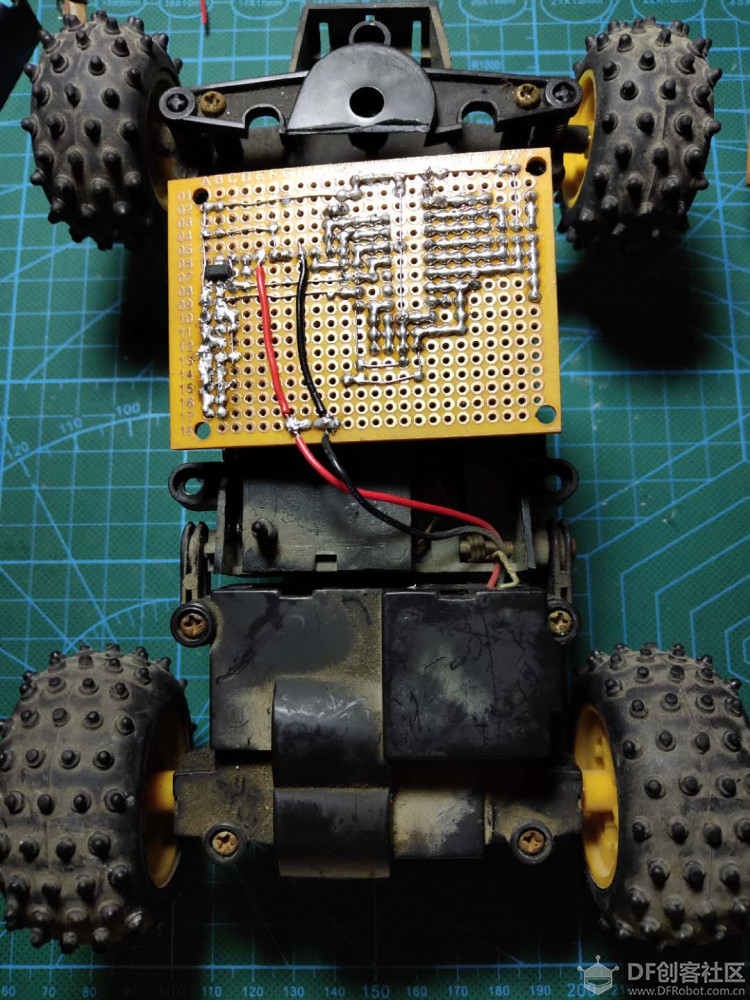 开始编程(以下内容可以不用观看,我会白送源代码) 首先说发射端的,用单片机自带的ADC管脚读取摇杆位置函数 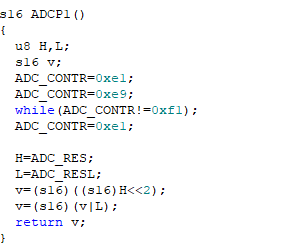 然后在主循环中,不断读取摇杆位置并且数据格式转换,然后发射出去,当收到ACK时,表示一包数据发射完成。 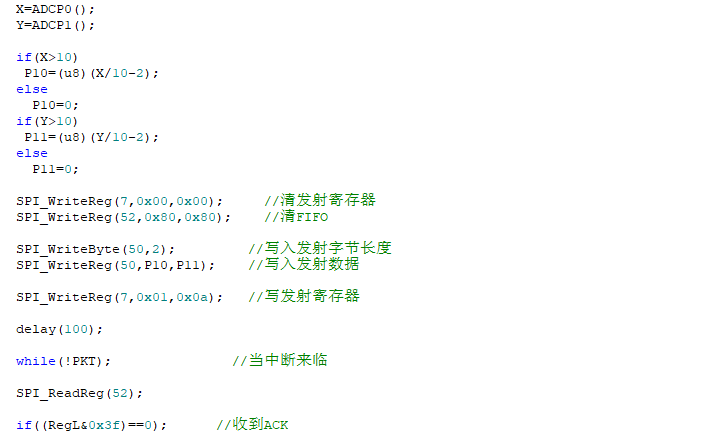 下面是接受端,使用定时器0产生控制驱动电机的500hz的PWM信号以及转向舵机用的50hz的PWM信号。 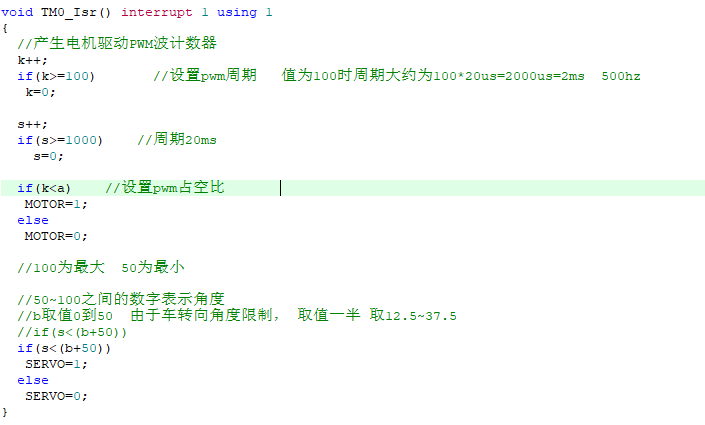 接着接受数据包 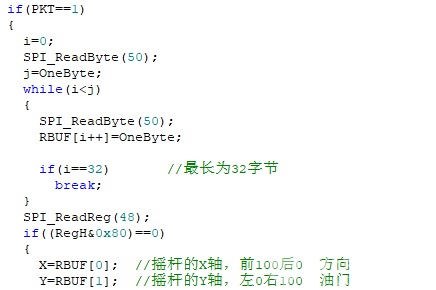 然后用收到的数据改变占空比,即可控制转向舵机以及驱动电机。 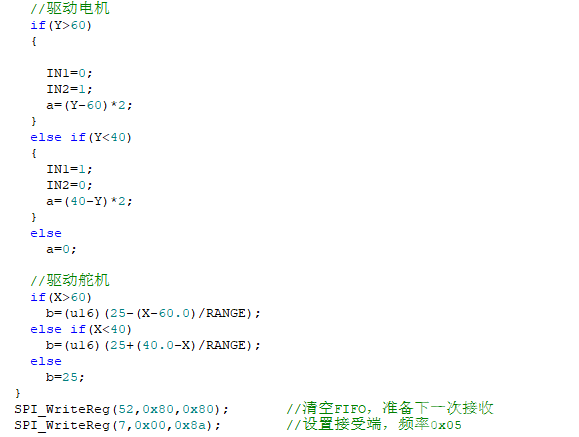 编程完毕,烧录程序中。由于线不够长,垫高电脑。  烧录好之后粘贴电路板到车子上,以及电池盒 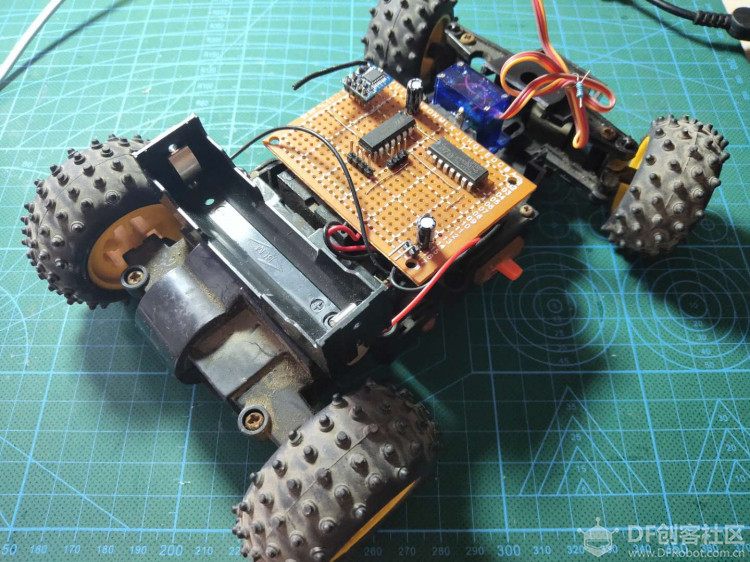 插上舵机线,安装电池,开始测试!  方向正确!电机转动方向正确,可以固定转向舵机了 没有热熔胶枪,采用土办法  固定好了 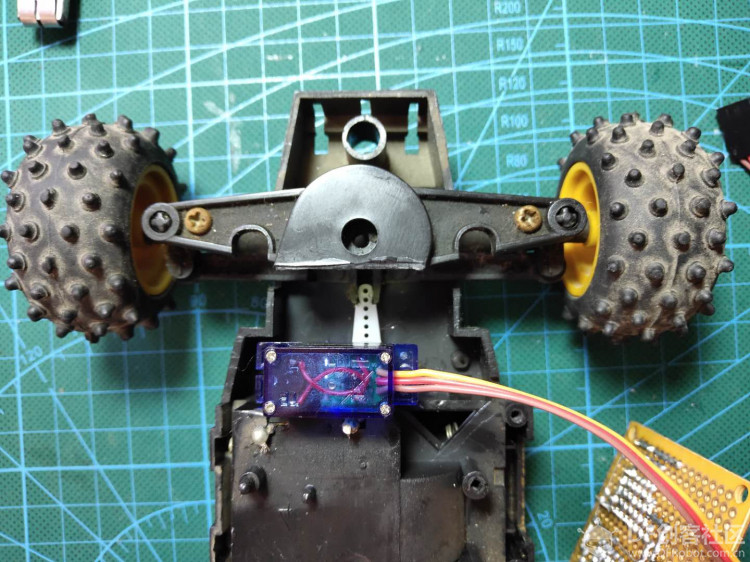 将线束都扎一下 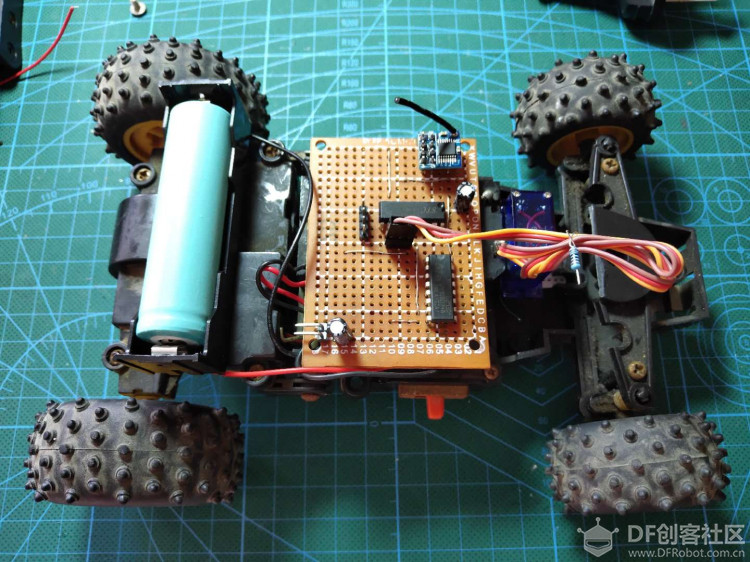 遥控器和遥控车的合影 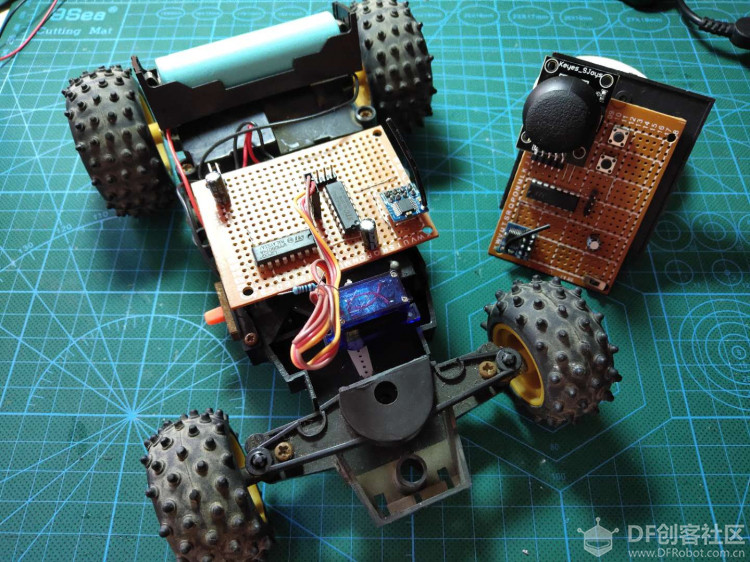 盖上车壳,坏了,车壳上的东西卡住了  准备将车壳上凸出来的都去掉 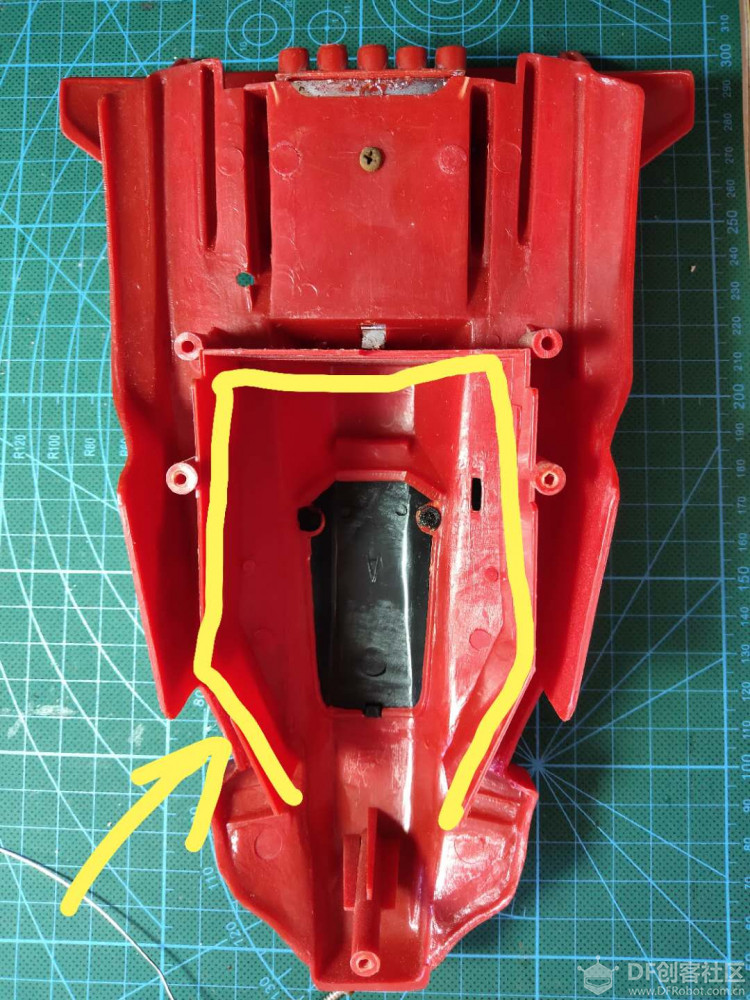 用手掰 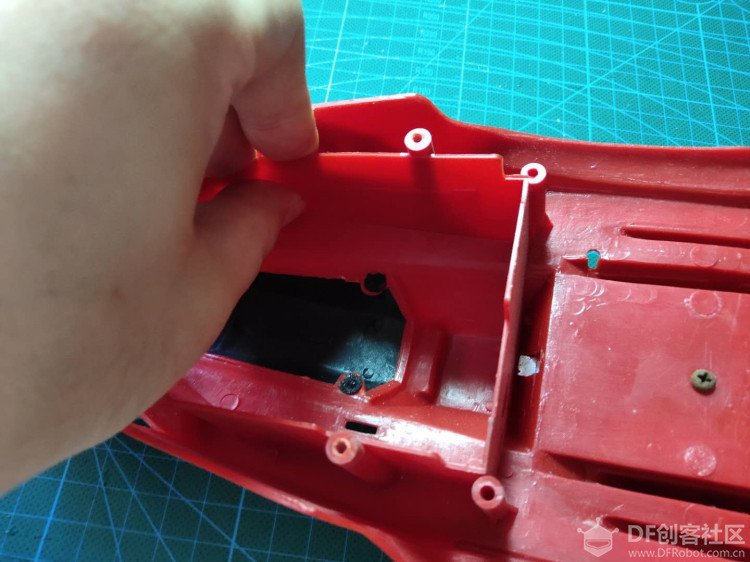 掰不动放弃,就裸奔吧,还方便换电池 上电先玩耍一下  感觉速度实在是太慢,增加一节电池 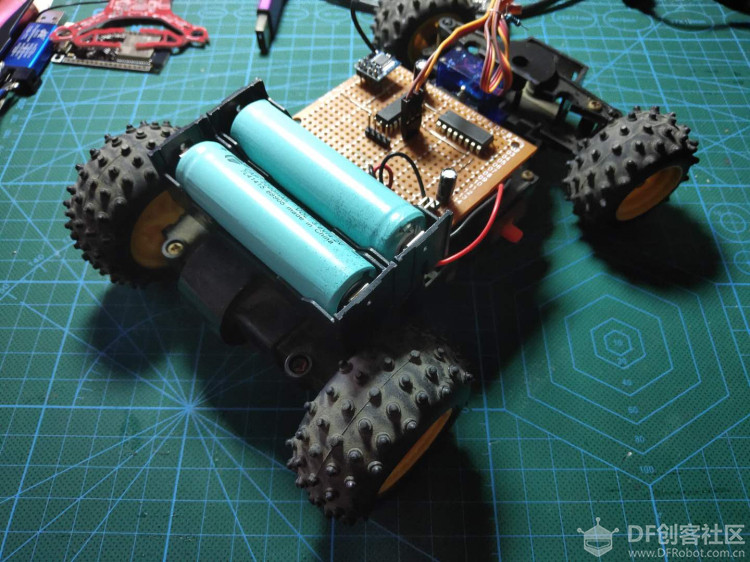 下地后快的飞起,GIF保证没有快放   一辆躺在垃圾堆的遥控车死而复生! 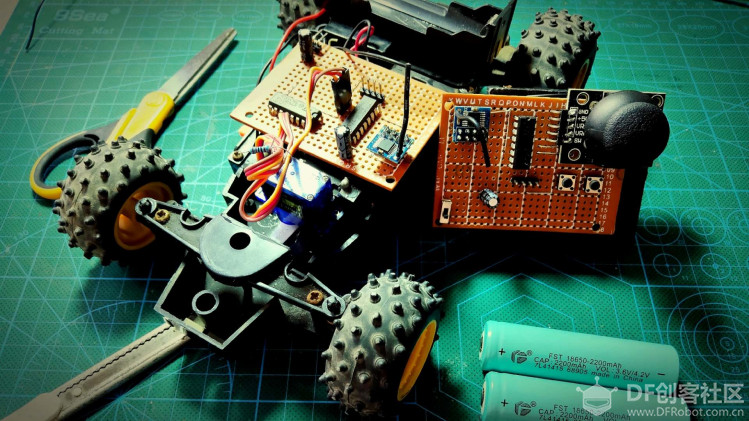 总结我这次改造凸显的优点 1.摒弃传统的遥控玩具采用的MHZ频段,采用更加通用的2.4GHZ频段的无线通讯芯片,有更加远的遥控距离,不会出现同品牌的遥控车一个遥控器可以遥控所有相同型号车辆的现象。 2.500HZ的PWM信号控制电机,车子速度可调,并且使得车辆动力输出更加线性,操控手感更加爽。 3.转向采用舵机,动力更加强劲,转向角度更加到位,为以后学习漂移操作预留空间。 4.使用18650品牌锂电池供电,比传统5号电池供电更加暴力,输出电流更加大,秒杀聚能环。 5.在不改变车辆主要结构的情况下,为车辆再次注入新鲜活力,为车辆带来二次生命。 6.装逼装不出来了。。。文章后附源码以及元件清单,请大家尽情享用。 源码以及材料清单请自取:https://pan.baidu.com/s/1W6SVgXlmeotVCG8l6kFw3Q 提取码:offs |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








