|
9085| 5
|
[入门教程] 狄仁杰机甲|基于SIOT的掌控板无线遥控模式 |
本帖最后由 rzyzzxw 于 2019-9-18 07:53 编辑  新版的机甲里有组装说明,所以就省去一个帖子了。 一堆散件,还是挺考验小朋友的动手能力的。  我的小车接线,专用口就专用,电机、舵机就近接线,和说明书上给的方法是一样的,建议大家都这样接线,方便程序分享和讨论借鉴: 左后电机---M1 右后电机---M2 左前电机---M3 右前电机---M4 水弹枪---P7(专用接口) 舵机---P11 主要器材清单: 创新利器 赶快下单,常常断货的 掌控板 1  盘古斧扩展板 1  9g小舵机 1 颜值担当的麦轮 1组 TT电机 4 锂电 1组 车架 水弹波箱 …… 【特别提示:水弹波箱是物理能量输出单元,射出水弹有较高速度,请勿对准人和动物,请佩戴护目镜】【注:本项目中狄仁杰机甲4电机安装在上底板】 本教程里,我将基于SIOT来用掌控板进行无线遥控。 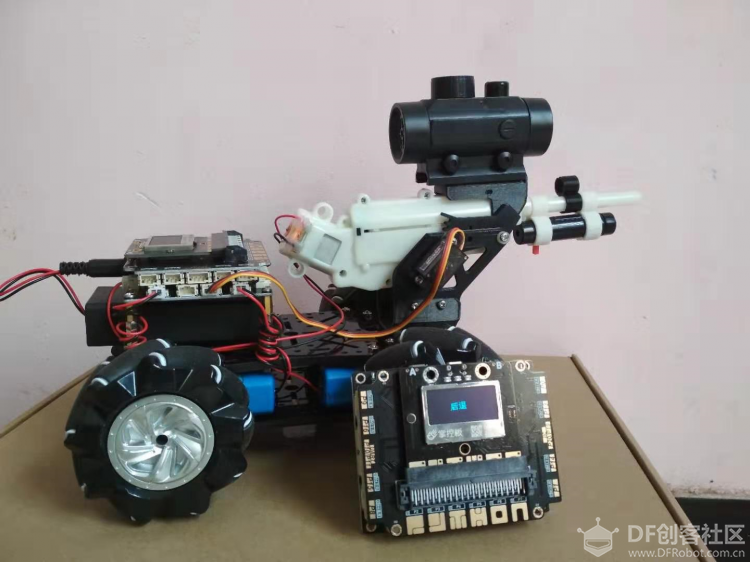 你可以用掌控宝扩展板给另一块掌控供电。 也以再来一块盘古斧更有手感。 当然可以直接用一块电池,或者一根线。随你怎么方便怎么来。 据说DF正在设计掌控板的遥控手柄,等不及了出可以自制一个玩。 你是创客,有什么能难到你呢。 我的计划是: 向左倾斜 左移 向右倾斜 右移 向前倾斜 前进 向后倾斜 后退 屏幕向上 停车 按P键 向左小幅度转向 按n键 向右小幅度转向 按Y键 抬枪 按O键 落枪 按H键 发射 测试视频: 小车端的程序和SIOT服务器设置和上一帖子一毛一样: 狄仁杰机甲|基于SIOT的mind+实时模式遥控 https://mc.dfrobot.com.cn/thread-297722-1-1.html SIOT服务器搭建 详细教程参考: K12物联网神器-SIoT(掌控板) https://mc.dfrobot.com.cn/thread-281102-1-1.html SIOT文档及软件下载: https://siot.readthedocs.io/zh_CN/latest/index.html STEP1、机甲小车端: 1、上传模式,添加如下主板及扩展    2、SIOT服务器搭建 详细教程参考: K12物联网神器-SIoT(掌控板) https://mc.dfrobot.com.cn/thread-281102-1-1.html SIOT文档及软件下载: https://siot.readthedocs.io/zh_CN/latest/index.html 启动服务器,在使用过程中不要关闭它。 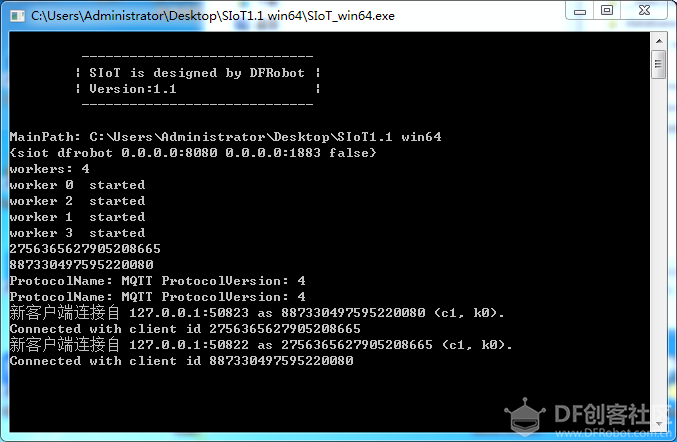 3、小车端程序   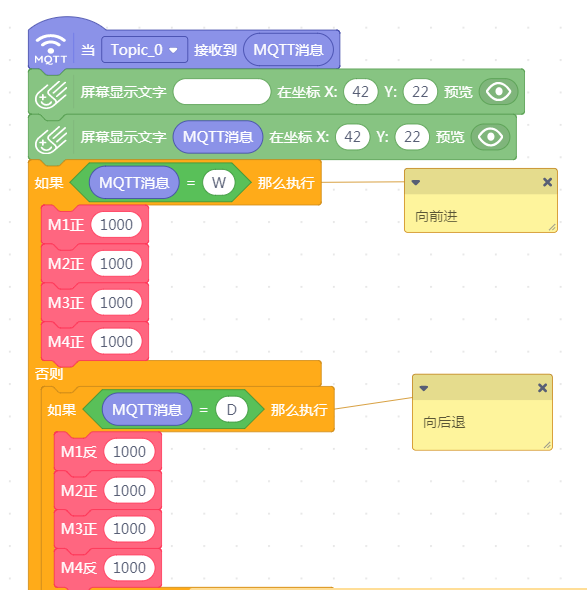 …… 运动控制较长,思路相似,省略部分图片 …… 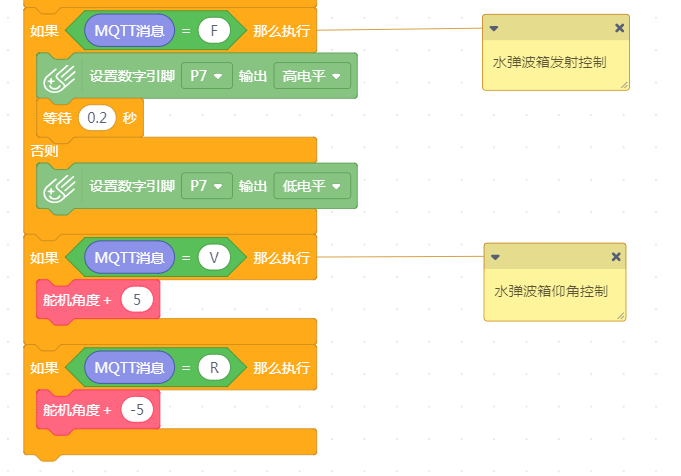 参考说明书建立电机控制函数 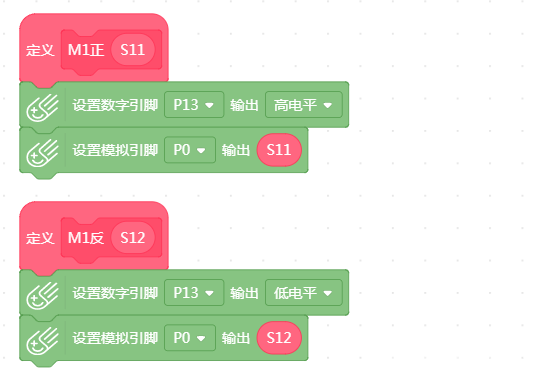 …… 程序较长,同样省略部分图片 舵机角度控制函数  参考程序下载:  狄仁杰机甲SIOT小车程序.zip 狄仁杰机甲SIOT小车程序.zipSTEP2、这里重点介绍下遥控端: mind+1.5.6 上传模式 项目关键技术点是:发送端和接由端用相同的SIOT设置,同一个topic。 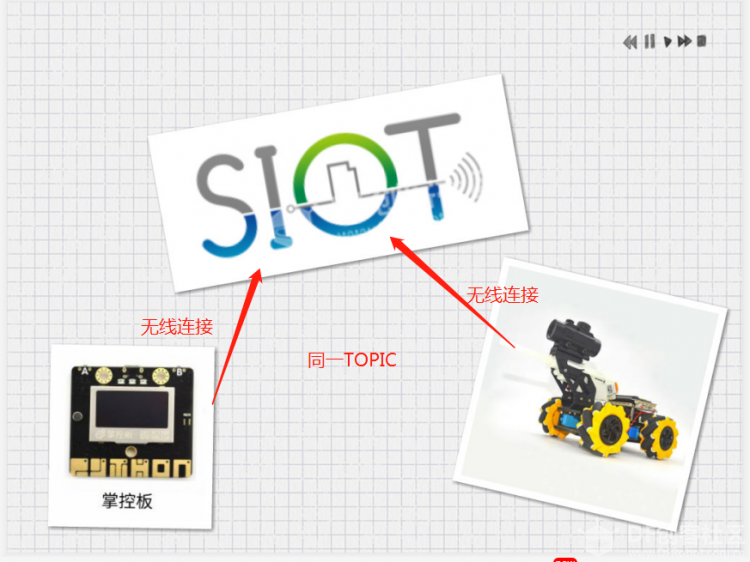 添加掌控板,网络插件  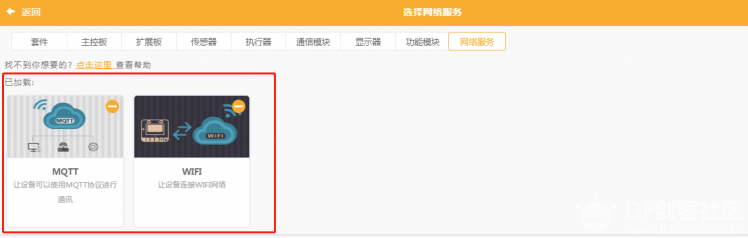  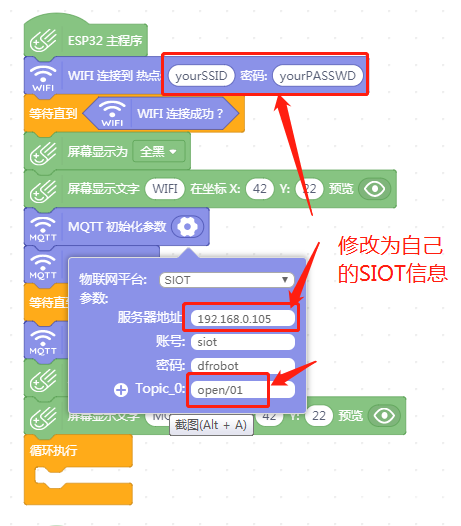  参考程序附上: 掌控SIOT无线遥控.zip请注意服务器要开启 SIOT信息正确无误 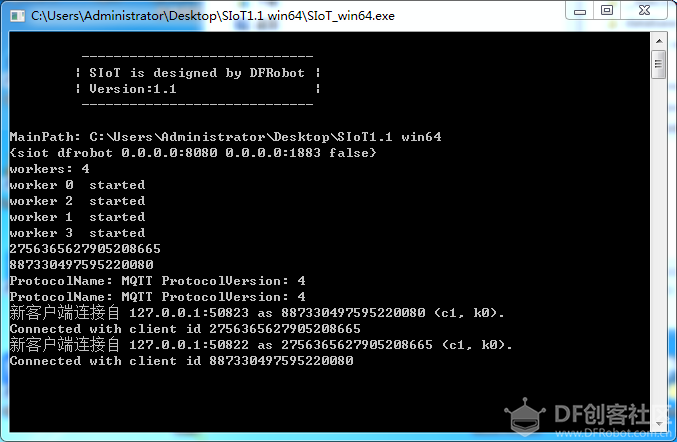 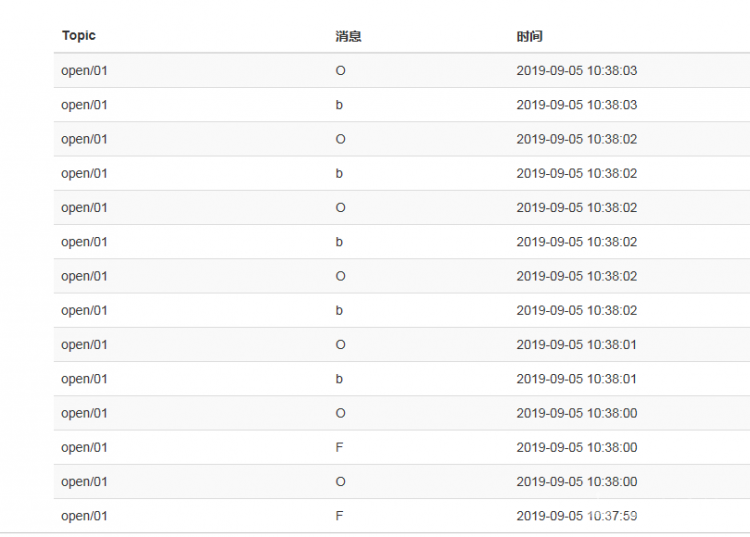 【备注:体感的反应较慢,如果有更好的遥控体验,建议用触摸按键遥控】  |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









