|
4670| 2
|
[2019年] 【嘉年华展示】探险车 |
|
本帖最后由 szjuliet 于 2019-9-29 22:24 编辑 此探险车模拟真实场景,代替人们探索未知环境,进行观测或前往危险环境工作,具有一定的越野能力和自动工作能力。 使用者可以通过控制端(手机或平板)对小车进行操控。 小车本身通过各种传感器采集数据并反馈到控制端,使用者能够通过小车搭载的摄像头远程观察情况。 主控部分由一个树莓派板加Arduino板组合而成,既利用了树莓派处理能力强大的优点,也利用了Arduino功能实现简单的特点。  作品所含功能
拟完善功能:
一、项目解构及流程图: 本项目可以解构为三大部分:APP端、车体组装及硬件部分。  1. 小车蓝牙连接流程 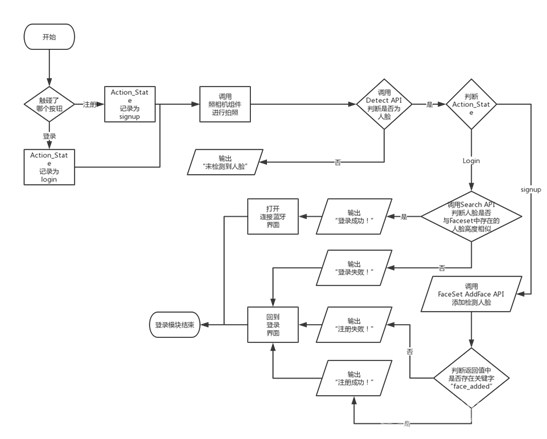 2. 小车登录界面流程 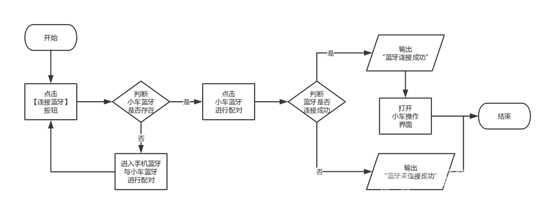 3. 小车操作界面流程 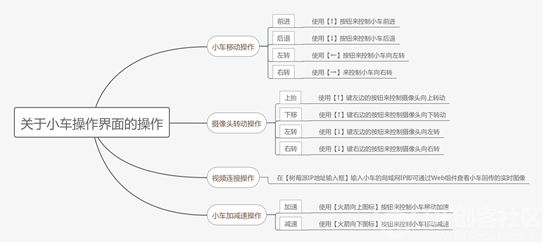 4. 人脸识别流程图 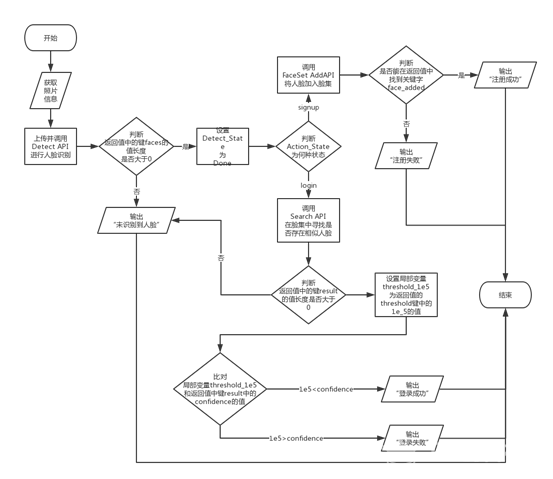 二、车体组装  小车使用的材料为高强度、低成本、耐高温耐腐蚀的铝镁合金,能有效降低制作成本,以履带方式传动,能够适应多种复杂路况。 小车采用了蓝牙&局域网通信双通信结构。 小车采用arduino主控器获取并传送传感器数据,控制小车及摄像头的方向,使用性能更好的树莓派获取动态图像并将图像传给控制端。 小车采用双电源:9V电池盒和充电宝供电,确保电力充足。 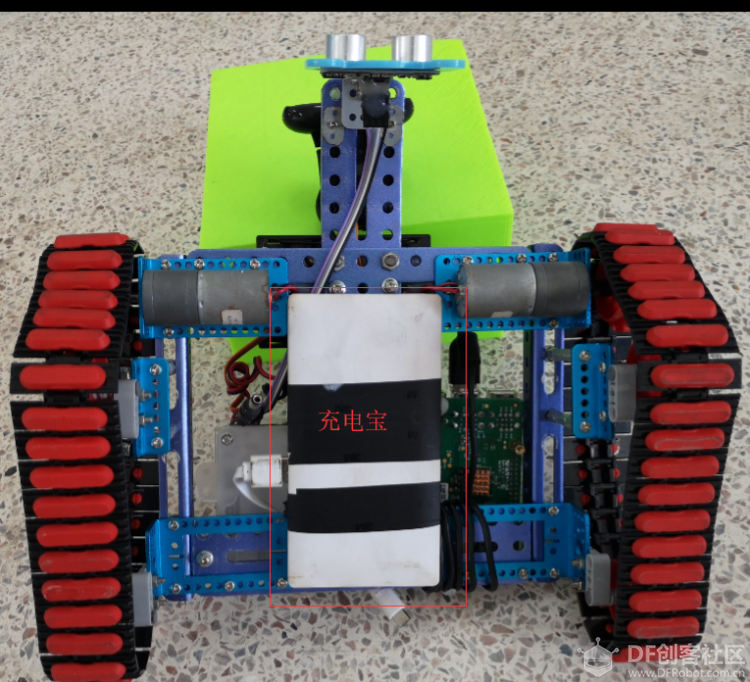 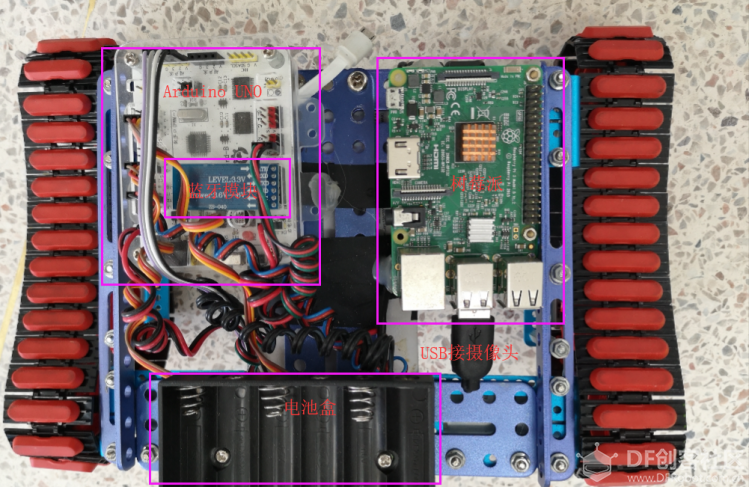 小车正面安装了Arduino UNO和树莓派。UNO上放置了蓝牙模块HC-06,小车使用蓝牙方式与手机通讯。树莓派连接摄像头,使用wifi方式将实时图像回传手机。 小车前方是超声波传感器,用于侦测前方是否有物体。小车上方是摄像头,连接树莓派;摄像头上的舵机连接UNO,使用蓝牙方式连接手机后,手机控制摄像头的方向。 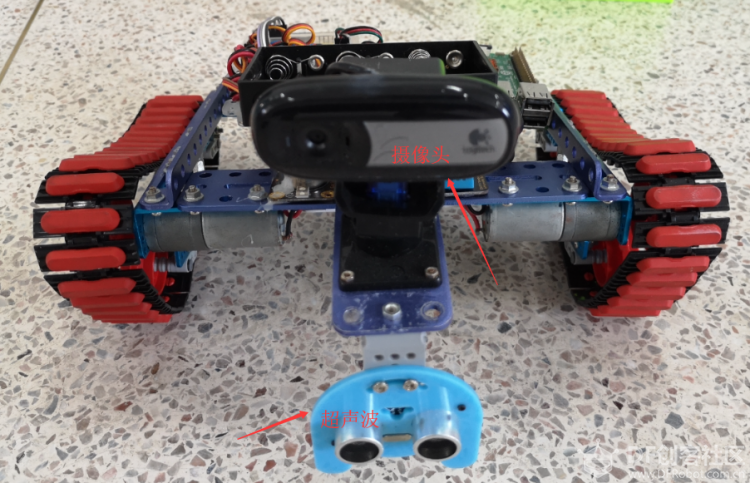 在电池盒的下方有气体传感器和温湿度传感器连接到UNO 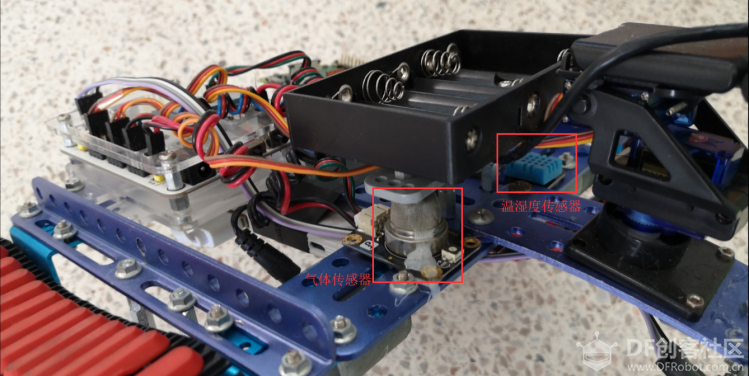 三、Arduino编程(回传环境数据,接收小车、摄像头的控制命令并执行) [mw_shl_code=cpp,true]#include <Servo.h> #include <dht11.h> dht11 DHT11; Servo myservo1; Servo myservo2; void setup() { pinMode(2, OUTPUT); pinMode(3, INPUT); pinMode(12, INPUT); pinMode(5, OUTPUT); pinMode(6, OUTPUT); pinMode(7, OUTPUT); pinMode(8, OUTPUT); myservo1.attach(4); myservo2.attach(9); Serial.begin(9600); myservo1.write(85); myservo2.write(10); } int sd = 200; int x = 85; int y = 10; int wd = 0; int s = 0; int qt = 0; int csb = 0; void loop() { digitalWrite(2, LOW); delayMicroseconds(2); digitalWrite(2, HIGH); delayMicroseconds(10); digitalWrite(2, LOW); csb = pulseIn(3, HIGH) / 58; if (csb > 99) csb = 99; DHT11.read(12); wd = (int)DHT11.temperature; s = (int)DHT11.humidity; qt = analogRead(0)/10; Serial.print("T#"); Serial.print(wd); Serial.print("H#"); Serial.print(s); Serial.print("C#"); Serial.print(csb); Serial.print("G#"); Serial.println(qt); for (int i=0;i<200;i++) { delay(10); char t = Serial.read(); if (t == '3') { digitalWrite(7, HIGH); digitalWrite(8, HIGH); analogWrite(5, sd); analogWrite(6, sd); } if (t == '1') { digitalWrite(7, LOW); digitalWrite(8, LOW); analogWrite(5, sd); analogWrite(6, sd); } if (t == '4') { digitalWrite(7, HIGH); digitalWrite(8, LOW); analogWrite(5, sd); analogWrite(6, sd); } if (t == '2') { digitalWrite(7, LOW); digitalWrite(8, HIGH); analogWrite(5, sd); analogWrite(6, sd); } if (t == '6') { digitalWrite(7, HIGH); digitalWrite(8, LOW); analogWrite(5, 0); analogWrite(6, 0); } if (t == '-') { sd = sd - 5; if (sd < 0) sd = 0; } if (t == '+') { sd = sd + 5; if (sd > 200) sd = 200; } if (t == '9') { x = x + 5; myservo1.write(x); delay(200); if (x > 180) x = 180; } if (t == '0') { x = x - 5; myservo1.write(x); delay(200); if (x < 0) x = 0; } if (t == '7') { y = y + 5; myservo2.write(y); delay(200); if (y > 120) y = 120; } if (t == '8') { y = y - 5; myservo2.write(y); delay(200); if (y < 0) y = 0; } } }[/mw_shl_code] 四、树莓派图像获取 树莓派使用mjpg-streamer获取USB摄像头图像。 项目工程:https://github.com/jacksonliam/mjpg-streamer。 将工程下载后,传送到树莓派系统中解压: unzip mjpg-streamer-master.zip 安装支持库:sudo apt-get install libjpeg8-dev 安装编译工程需要用到cmake:sudo apt-get install cmake 进入工程mjpg-streamer-experimental,进行完全编译:make clean all 进入树莓派设置菜单:sudo raspi-config,启用摄像头“Enable Camera”后重启树莓派。 进入mjpg-streamer-experimental目录,启动普通USB摄像头:./mjpg_streamer -i "./input_uvc.so" -o "./output_http.so -w ./www" 打开浏览器, 查看静态截图:http://<树莓派IP>:8080/?action=snapshot 查看动态图像:http://<树莓派IP>:8080/?action=stream  参考资料:https://blog.csdn.net/blueslime/article/details/12429411 五、手机端编程 1. 组件设计

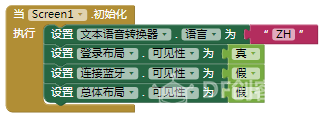
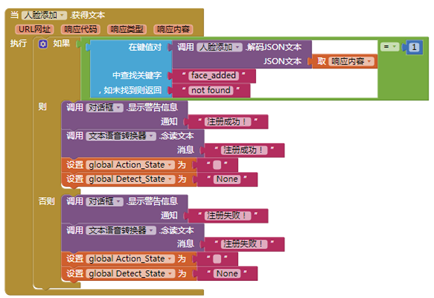
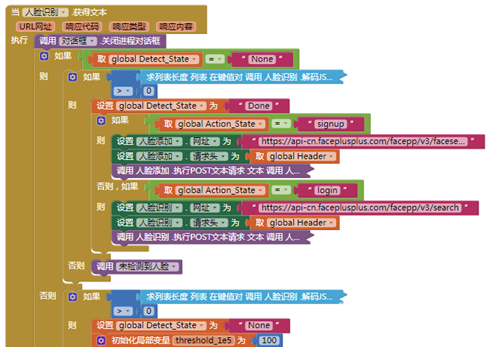
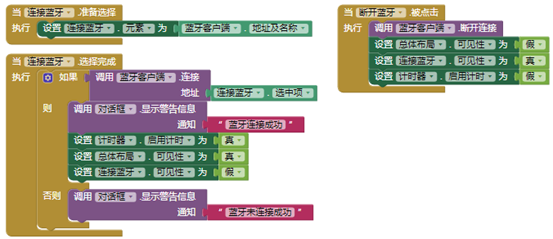
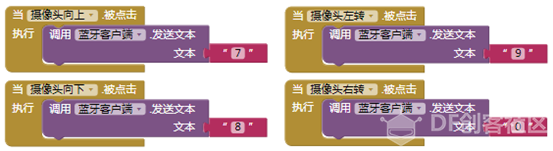
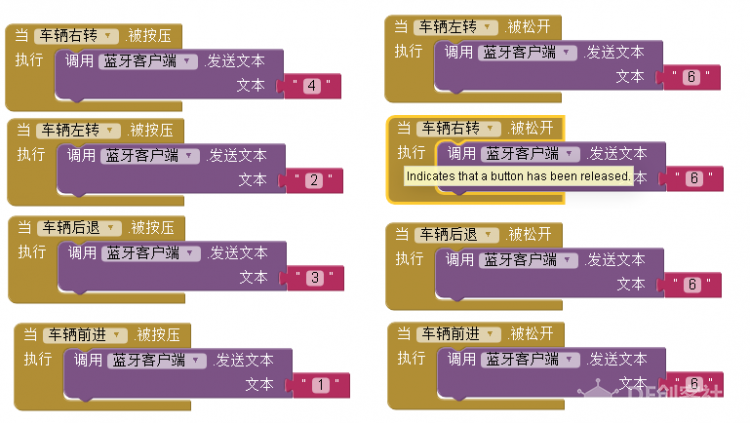
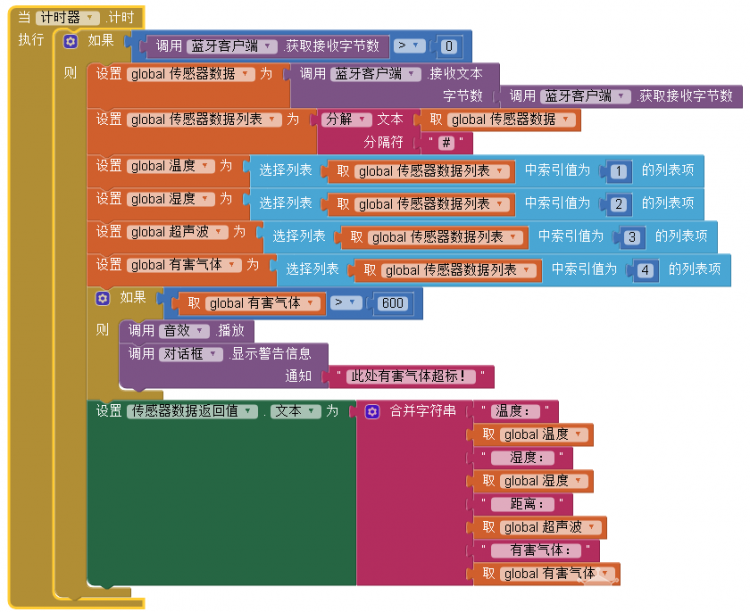
 手机客户端截图: 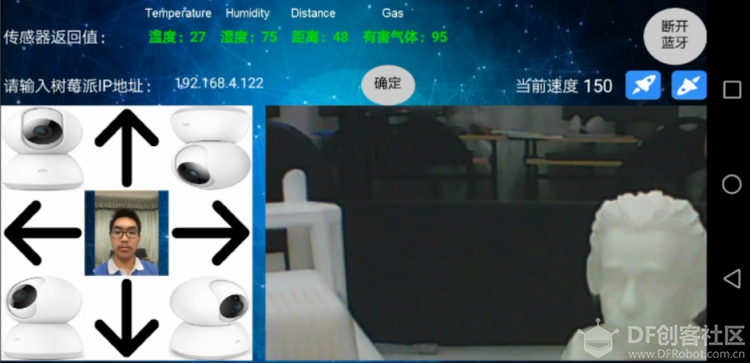 2. 逻辑设计:


 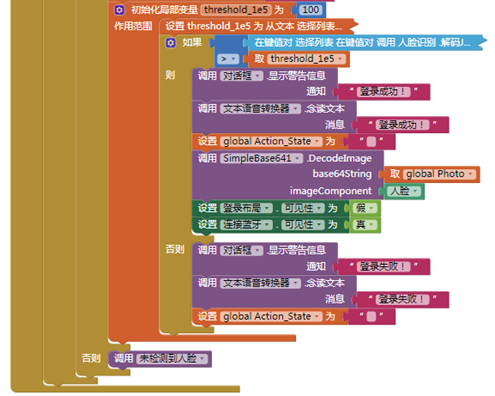 登录成功后,手机屏幕呈现登录者照片



 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 版主限定
版主限定
 创作达人
创作达人
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 星球译员
星球译员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






