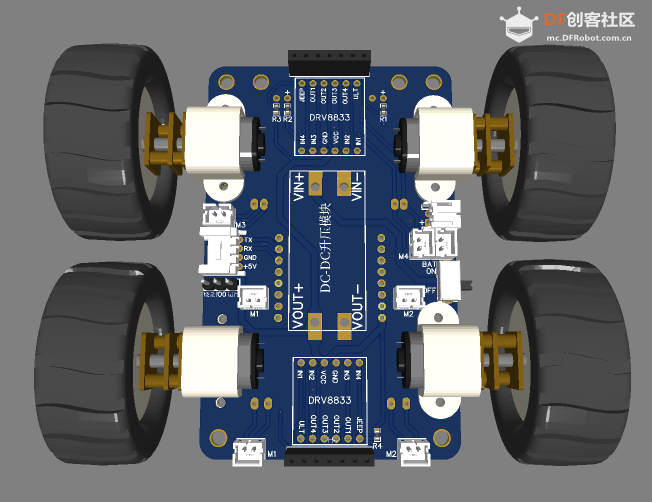
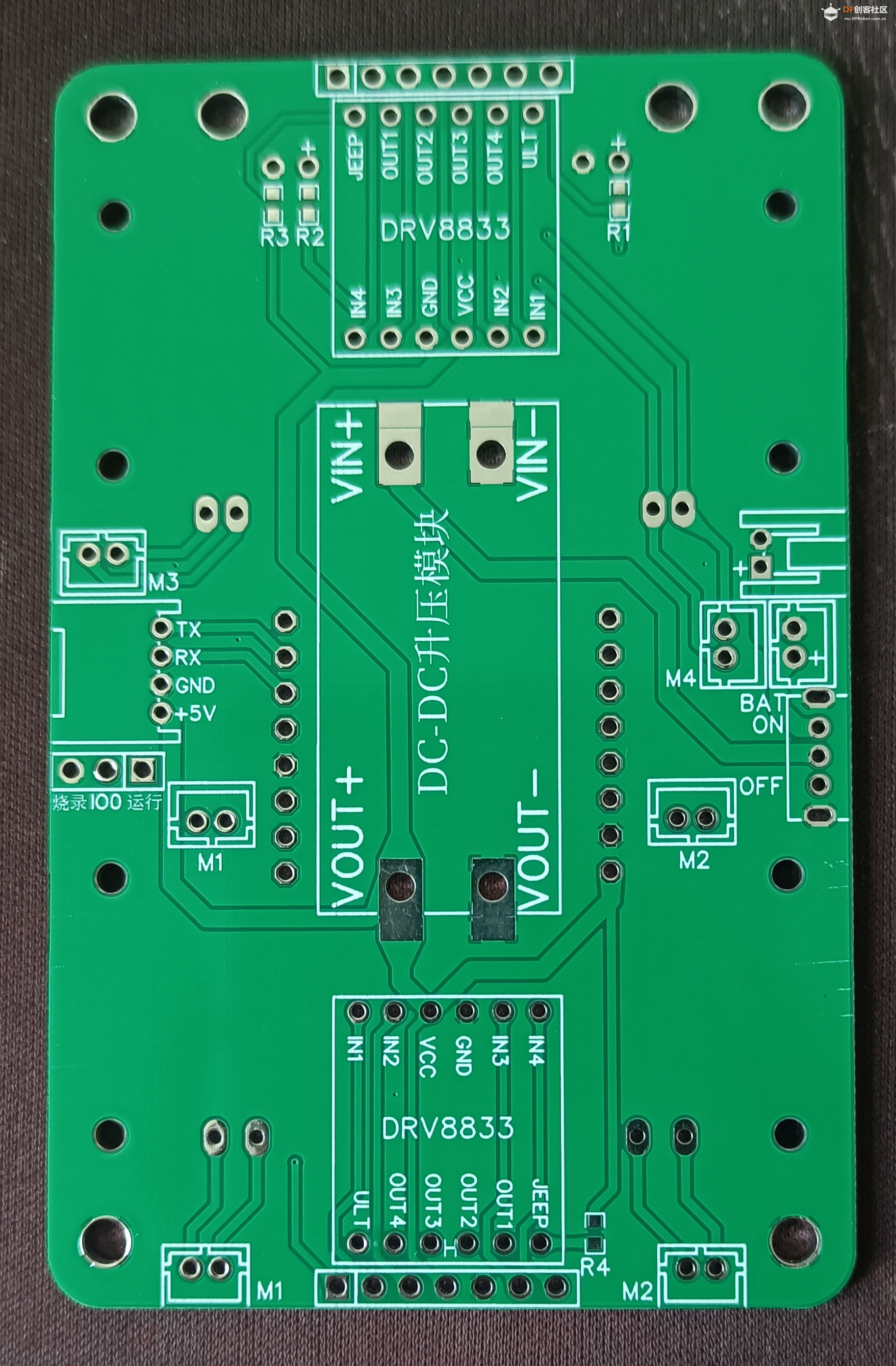
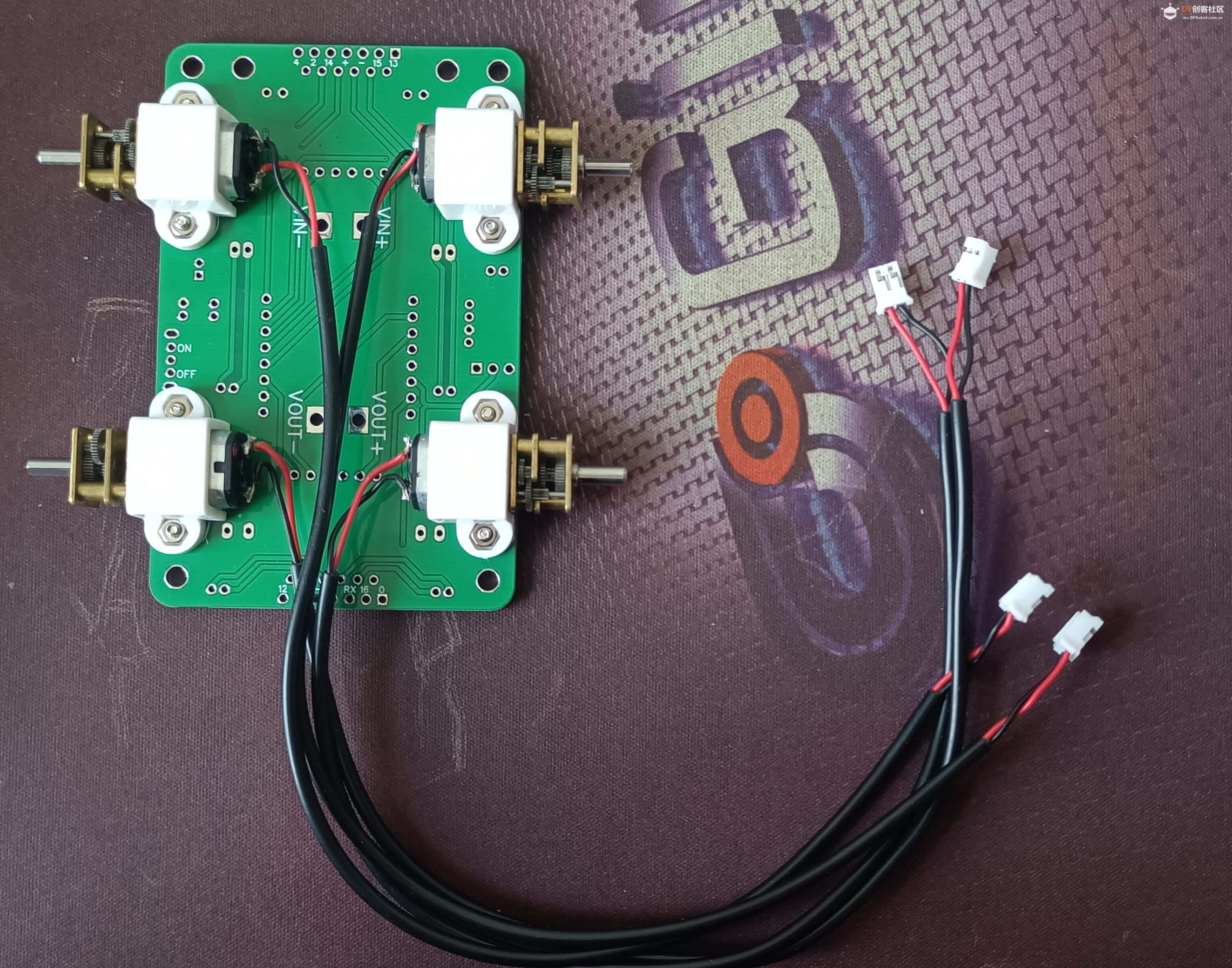
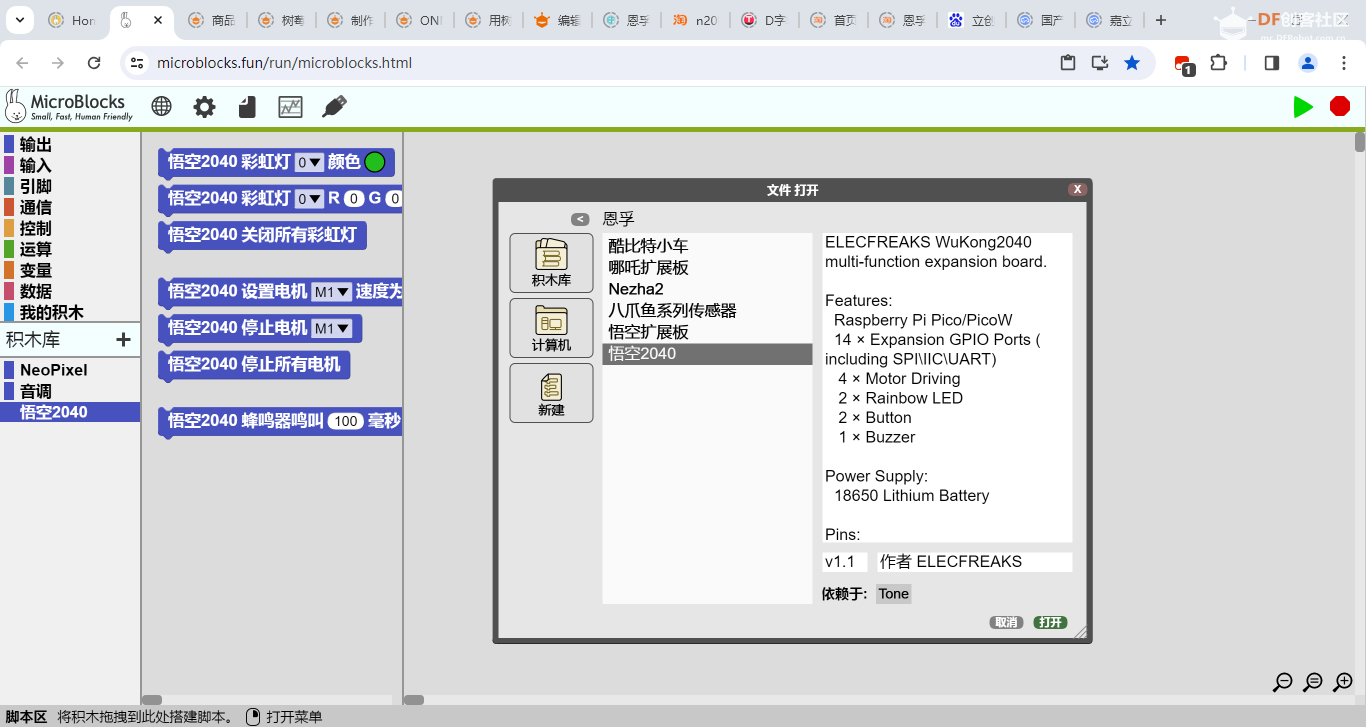
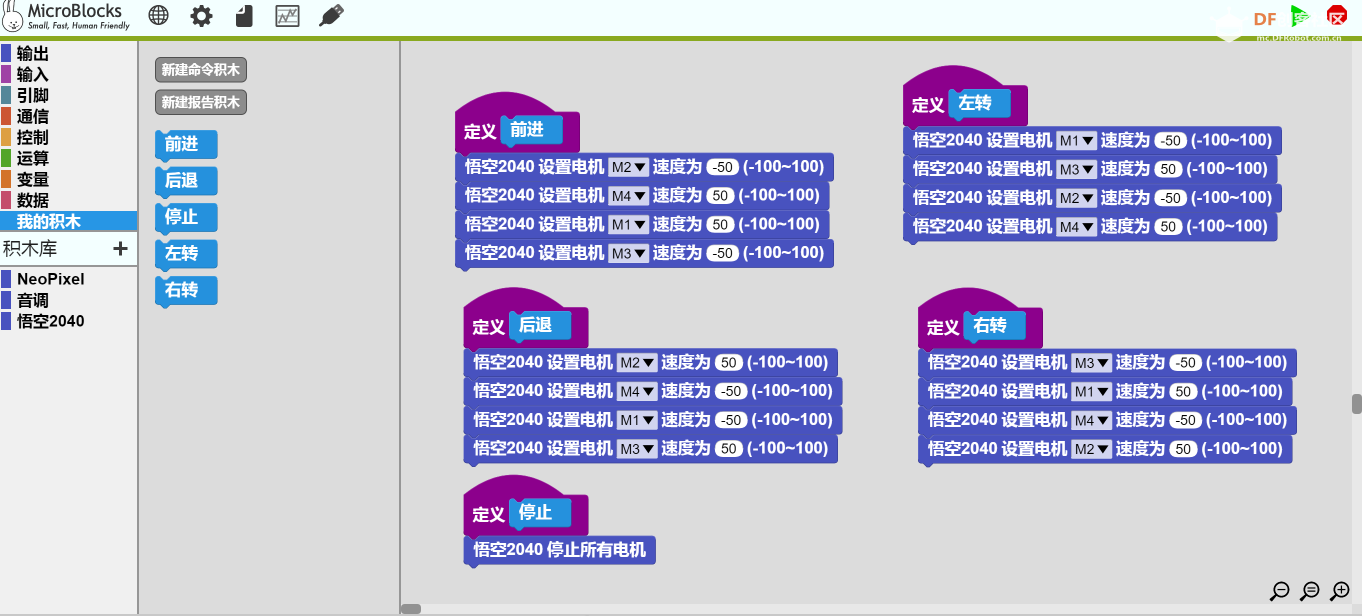
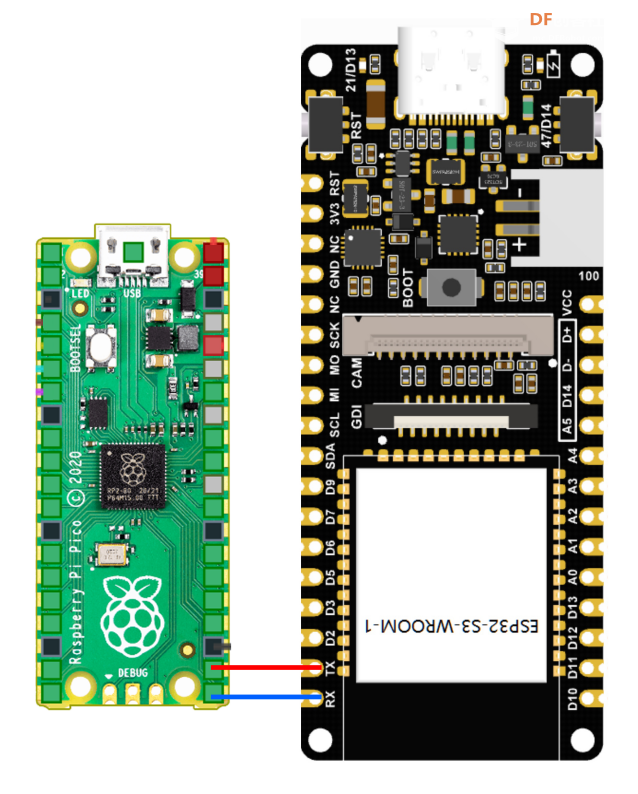
本帖最后由 豆爸 于 2024-1-10 15:17 编辑 作品介绍: 本作品使用树莓派Pico实现一个小车。 功能介绍: 基础功能:实现小车的进行、后退、停止、左转、右转的控制。 拓展功能:手机APP控制、FPV、视觉控制等。 设计思路: 基础功能:通过 Raspberry Pi Pico + 悟空2040树莓派扩展板,通过实现 microblocks编程实现。 基础功能:由于 Raspberry Pi Pico不支持wifi,为了实现无线控制,需要增加支持wifi的模块,鉴于视觉的考虑,可以增加一块ESP32-S3,来实现APP控制、FPV等功能。 器材清单: 悟空2040树莓派扩展板WuKong2040 * 1块 N20电机 * 4个 43MM轮子 * 4个 制作过程( 基础功能部分 ): 1、嘉立创EDA 绘制小车底板 2、PCB打样 3、 安装电机,焊接电机线 悟空2040树莓派扩展板 编写程序( 基础功能部分 ): https://microblocks.fun/run/microblocks.html 拓展功能: 1、接线图 树莓派Pico ESP32
TX GPIO0 —————— U0R IO13
RX GPIO1 —————— U0T IO12
GND —————— GND
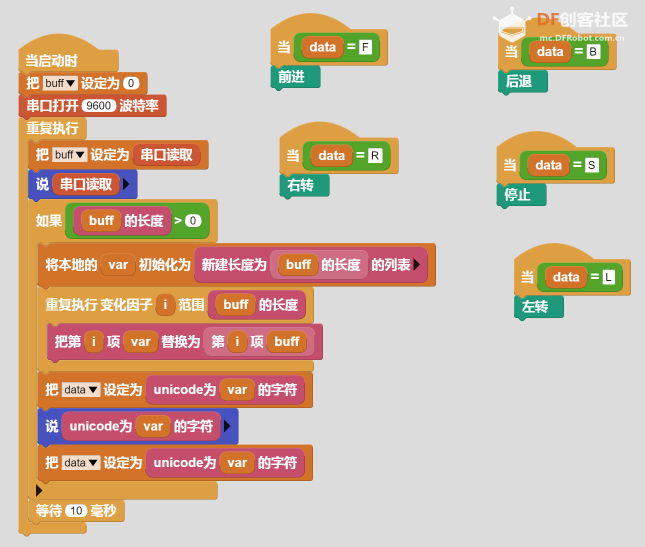
2、树莓派Pico端程序: 3、 ESP32-S3端程序: 1)主程序FPVCar .ino #include "esp_camera.h"
#include <WiFi.h>
#include <Arduino OTA.h>
#include <ESP32Servo.h>
// #include <EEPROM.h>
// #define EEPROM_speed 2 //地址范围0-4095
// #define EEPROM_Size 1024 //开辟1024个位空间
/* Wifi Crdentials */
// String sta_ssid = "MKMK"; // set Wifi network you want to connect to
// String sta_password = "MAKRMAKER"; // set password for Wifi network
/* define CAMERA_MODEL_AI_THINKER */
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
/* Defining motor and servo pins */
extern int DRV_A = 2;
extern int DRV_B = 13;
extern int DIR_A = 14;
extern int DIR_B = 15;
extern int ledVal = 20; // setting bright of flash LED 0-255
extern int ledPin = 4; // set digital pin GPIO4 as LED pin (use biult-in LED)
// extern int buzzerPin = 2; // set digital pin GPIO2 as LED pin (use Active Buzzer)
// extern int servoPin = 12; // set digital pin GPIO2 as servo pin (use SG90)
extern int servoPin = 12;
Servo myservo;
// int EEPROM_dataT;
unsigned long previousMillis = 0;
int speed1=255;//右边
int speed2=255;
void startCameraServer();
void initServo() {
myservo.attach(12,500,2500);
myservo.write(90);
delay(100);
digitalWrite(servoPin, LOW);
}
void initLed() {
ledcSetup(7, 5000, 8); /* 5000 hz PWM, 8-bit resolution and range from 0 to 255 */
ledcAttachPin(ledPin, 7);
}
void setup() {
Serial.begin(115200); // set up seriamonitor at 115200 bps
Serial.setDebugOutput(true);
Serial.println();
Serial.println("*ESP32 Camera Remote Control - L293D Bluino Shield*");
Serial.println("--------------------------------------------------------");
Serial1.begin(9600, SERIAL_8N1, 12, 13); // 初始化 UART1,波特率为 115200,TX 引脚为 GPIO12,RX 引脚为 GPIO13
// Set all the motor control pin to Output
pinMode(DRV_A, OUTPUT);
pinMode(DRV_B, OUTPUT);
pinMode(DIR_A, OUTPUT);
pinMode(DIR_B, OUTPUT);
pinMode(ledPin, OUTPUT); // set the LED pin as an Output
// pinMode(buzzerPin, OUTPUT); // set the buzzer pin as an Output
pinMode(servoPin, OUTPUT); // set the servo pin as an Output
// Initial state - turn off motors, LED & buzzer
// digitalWrite(DRV_A, LOW);
// digitalWrite(DRV_B, LOW);
// digitalWrite(DIR_A, LOW);
// digitalWrite(DIR_B, LOW);
analogWrite(DRV_A, 0);
analogWrite(DRV_B, 0);
analogWrite(DIR_A, 0);
analogWrite(DIR_B, 0);
digitalWrite(ledPin, LOW);
// digitalWrite(buzzerPin, LOW);
digitalWrite(servoPin, LOW);
myservo.setPeriodHertz(50);// Standard 50hz servo
myservo.attach(servoPin, 500, 2400);
/* Initializing Servo and LED */
initServo();
initLed();
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
//init with high specs to pre-allocate larger buffers
if(psramFound()){
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 10;
config.fb_count = 1;
}
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
//drop down frame size for higher initial frame rate
sensor_t * s = esp_camera_sensor_get();
s->set_framesize(s, FRAMESIZE_QVGA);
// Set NodeMCU Wifi hostname based on chip mac address
char chip_id[15];
snprintf(chip_id, 15, "%04X", (uint16_t)(ESP.getEfuseMac()>>32));
String hostname = "esp32cam-" + String(chip_id);
Serial.println();
Serial.println("Hostname: "+hostname);
// first, set NodeMCU as STA mode to connect with a Wifi network
// WiFi.mode(WIFI_STA);
// WiFi.begin(sta_ssid.c_str(), sta_password.c_str());
// Serial.println("");
// Serial.print("Connecting to: ");
// Serial.println(sta_ssid);
// Serial.print("Password: ");
// Serial.println(sta_password);
// // try to connect with Wifi network about 10 seconds
// unsigned long currentMillis = millis();
// previousMillis = currentMillis;
// while (WiFi.status() != WL_CONNECTED && currentMillis - previousMillis <= 10000) {
// delay(500);
// Serial.print(".");
// currentMillis = millis();
// }
// if failed to connect with Wifi network set NodeMCU as AP mode
IPAddress myIP;
// if (WiFi.status() == WL_CONNECTED) {
// Serial.println("");
// Serial.println("*WiFi-STA-Mode*");
// Serial.print("IP: ");
// myIP=WiFi.localIP();
// Serial.println(myIP);
// delay(2000);
// } else {
WiFi.mode(WIFI_AP);
WiFi.softAP(hostname.c_str());
myIP = WiFi.softAPIP();
Serial.println("");
// Serial.println("WiFi failed connected to " + sta_ssid);
Serial.println("");
Serial.println("*WiFi-AP-Mode*");
Serial.print("AP IP address: ");
Serial.println(myIP);
delay(2000);
// }
// Start camera server to get realtime view
startCameraServer();
Serial.print("Camera Ready! Use 'http://");
Serial.print(myIP);
Serial.println("' to connect ");
// ArduinoOTA.begin(); // enable to receive update/upload firmware via Wifi OTA
}
void loop() {
// put your main code here, to run repeatedly:
// ArduinoOTA.handle();
}
复制代码 #include "esp_http_server.h"
#include "esp_timer.h"
#include "esp_camera.h"
#include "img_converters.h"
#include "Arduino.h"
#include <ESP32Servo.h>
#include "cJSON.h"
// #include <EEPROM.h>
// #define EEPROM_speedT 2 //地址范围0-4095
// // #define EEPROM_speedY 10 //地址范围0-4095
// // #define EEPROM_speedU 20 //地址范围0-4095
// #define EEPROM_Size 1024 //开辟1024个位空间
extern int EEPROM_dataT;
// extern int EEPROM_dataY;
// extern int EEPROM_dataU;
/* Initializing pins */
extern int DRV_A;
extern int DRV_B;
extern int DIR_A;
extern int DIR_B;
extern int ledPin;
// extern int buzzerPin;
// extern int servoPin;
extern int ledVal;
extern Servo myservo;
// extern Servo servo_1;
extern int servoPin;
extern int speed1;
extern int speed2;
extern int speed1d;
extern int speed2d;
// servo_1.attach(2,500,2500);
typedef struct {
httpd_req_t *req;
size_t len;
} jpg_chunking_t;
//定义视频流相关常量
#define PART_BOUNDARY "123456789000000000000987654321"
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
httpd_handle_t stream_httpd = NULL;
httpd_handle_t camera_httpd = NULL;
// 这是一个回调函数,用于编码并发送JPEG数据流
static size_t jpg_encode_stream(void * arg, size_t index, const void* data, size_t len){
jpg_chunking_t *j = (jpg_chunking_t *)arg;
if(!index){
j->len = 0;
}
if(httpd_resp_send_chunk(j->req, (const char *)data, len) != ESP_OK){
return 0;
}
j->len += len;
return len;
}
// 这是处理图像捕获请求的函数,捕获并发送图像
static esp_err_t capture_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
int64_t fr_start = esp_timer_get_time();
fb = esp_camera_fb_get();
if (!fb) {
Serial.printf("Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
httpd_resp_set_type(req, "image/jpeg");
httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.jpg");
size_t fb_len = 0;
if(fb->format == PIXFORMAT_JPEG){
fb_len = fb->len;
res = httpd_resp_send(req, (const char *)fb->buf, fb->len);
} else {
jpg_chunking_t jchunk = {req, 0};
res = frame2jpg_cb(fb, 80, jpg_encode_stream, &jchunk)?ESP_OK:ESP_FAIL;
httpd_resp_send_chunk(req, NULL, 0);
fb_len = jchunk.len;
}
esp_camera_fb_return(fb);
int64_t fr_end = esp_timer_get_time();
Serial.printf("JPG: %uB %ums", (uint32_t)(fb_len), (uint32_t)((fr_end - fr_start)/1000));
return res;
}
// 这是处理视频流请求的函数,捕获视频流并发送给客户端
static esp_err_t stream_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len = 0;
uint8_t * _jpg_buf = NULL;
char * part_buf[64];
static int64_t last_frame = 0;
if(!last_frame) {
last_frame = esp_timer_get_time();
}
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
while(true){
fb = esp_camera_fb_get();
if (!fb) {
Serial.printf("Camera capture failed");
res = ESP_FAIL;
} else {
if(fb->format != PIXFORMAT_JPEG){
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
esp_camera_fb_return(fb);
fb = NULL;
if(!jpeg_converted){
Serial.printf("JPEG compression failed");
res = ESP_FAIL;
}
} else {
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
}
if(res == ESP_OK){
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if(fb){
esp_camera_fb_return(fb);
fb = NULL;
_jpg_buf = NULL;
} else if(_jpg_buf){
free(_jpg_buf);
_jpg_buf = NULL;
}
if(res != ESP_OK){
break;
}
int64_t fr_end = esp_timer_get_time();
int64_t frame_time = fr_end - last_frame;
last_frame = fr_end;
frame_time /= 1000;
}
last_frame = 0;
return res;
}
// 这是处理命令请求的函数,根据请求执行不同的命令
static esp_err_t cmd_handler(httpd_req_t *req){
char* buf;
size_t buf_len;
char variable[32] = {0,};
char value[32] = {0,};
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char*)malloc(buf_len);
Serial.println(buf);
if(!buf){
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
if (httpd_query_key_value(buf, "var", variable, sizeof(variable)) == ESP_OK &&
httpd_query_key_value(buf, "val", value, sizeof(value)) == ESP_OK) {
} else {
free(buf);
Serial.println(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
} else {
free(buf);
Serial.println(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
Serial.println(buf);
free(buf);
} else {
httpd_resp_send_404(req);
Serial.println(ESP_FAIL);
return ESP_FAIL;
}
int val = atoi(value);
sensor_t * s = esp_camera_sensor_get();
int res = 0;
if(!strcmp(variable, "framesize")) {
if(s->pixformat == PIXFORMAT_JPEG) res = s->set_framesize(s, (framesize_t)val);
}
else if(!strcmp(variable, "quality")) res = s->set_quality(s, val);
else if(!strcmp(variable, "contrast")) res = s->set_contrast(s, val);
else if(!strcmp(variable, "brightness")) res = s->set_brightness(s, val);
else if(!strcmp(variable, "saturation")) res = s->set_saturation(s, val);
else if(!strcmp(variable, "gainceiling")) res = s->set_gainceiling(s, (gainceiling_t)val);
else if(!strcmp(variable, "colorbar")) res = s->set_colorbar(s, val);
else if(!strcmp(variable, "awb")) res = s->set_whitebal(s, val);
else if(!strcmp(variable, "agc")) res = s->set_gain_ctrl(s, val);
else if(!strcmp(variable, "aec")) res = s->set_exposure_ctrl(s, val);
else if(!strcmp(variable, "hmirror")) res = s->set_hmirror(s, val);
else if(!strcmp(variable, "vflip")) res = s->set_vflip(s, val);
else if(!strcmp(variable, "awb_gain")) res = s->set_awb_gain(s, val);
else if(!strcmp(variable, "agc_gain")) res = s->set_agc_gain(s, val);
else if(!strcmp(variable, "aec_value")) res = s->set_aec_value(s, val);
else if(!strcmp(variable, "aec2")) res = s->set_aec2(s, val);
else if(!strcmp(variable, "dcw")) res = s->set_dcw(s, val);
else if(!strcmp(variable, "bpc")) res = s->set_bpc(s, val);
else if(!strcmp(variable, "wpc")) res = s->set_wpc(s, val);
else if(!strcmp(variable, "raw_gma")) res = s->set_raw_gma(s, val);
else if(!strcmp(variable, "lenc")) res = s->set_lenc(s, val);
else if(!strcmp(variable, "special_effect")) res = s->set_special_effect(s, val);
else if(!strcmp(variable, "wb_mode")) res = s->set_wb_mode(s, val);
else if(!strcmp(variable, "ae_level")) res = s->set_ae_level(s, val);
else {
res = -1;
}
if(res){
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
// 这个函数用于处理状态请求,返回相机的当前状态
static esp_err_t status_handler(httpd_req_t *req){
static char json_response[1024];
sensor_t * s = esp_camera_sensor_get();
char * p = json_response;
*p++ = '{';
p+=sprintf(p, ""framesize":%u,", s->status.framesize);
p+=sprintf(p, ""quality":%u,", s->status.quality);
p+=sprintf(p, ""brightness":%d,", s->status.brightness);
p+=sprintf(p, ""contrast":%d,", s->status.contrast);
p+=sprintf(p, ""saturation":%d,", s->status.saturation);
p+=sprintf(p, ""special_effect":%u,", s->status.special_effect);
p+=sprintf(p, ""wb_mode":%u,", s->status.wb_mode);
p+=sprintf(p, ""awb":%u,", s->status.awb);
p+=sprintf(p, ""awb_gain":%u,", s->status.awb_gain);
p+=sprintf(p, ""aec":%u,", s->status.aec);
p+=sprintf(p, ""aec2":%u,", s->status.aec2);
p+=sprintf(p, ""ae_level":%d,", s->status.ae_level);
p+=sprintf(p, ""aec_value":%u,", s->status.aec_value);
p+=sprintf(p, ""agc":%u,", s->status.agc);
p+=sprintf(p, ""agc_gain":%u,", s->status.agc_gain);
p+=sprintf(p, ""gainceiling":%u,", s->status.gainceiling);
p+=sprintf(p, ""bpc":%u,", s->status.bpc);
p+=sprintf(p, ""wpc":%u,", s->status.wpc);
p+=sprintf(p, ""raw_gma":%u,", s->status.raw_gma);
p+=sprintf(p, ""lenc":%u,", s->status.lenc);
p+=sprintf(p, ""hmirror":%u,", s->status.hmirror);
p+=sprintf(p, ""dcw":%u,", s->status.dcw);
p+=sprintf(p, ""colorbar":%u", s->status.colorbar);
*p++ = '}';
*p++ = 0;
httpd_resp_set_type(req, "application/json");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, json_response, strlen(json_response));
}
// 这个函数用于处理设备状态请求,根据请求执行不同的操作,例如控制舵机角度
static esp_err_t state_handler(httpd_req_t *req){
char* buf;
size_t buf_len;
char cmd[32] = {0,};
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char*)malloc(buf_len);
Serial.println(buf);
if(!buf){
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
if (httpd_query_key_value(buf, "cmd", cmd, sizeof(cmd)) == ESP_OK) {
} else {
free(buf);
Serial.print("*");
Serial.println(ESP_FAIL);
httpd_resp_send_404(req);
return ESP_FAIL;
}
} else {
free(buf);
Serial.print("**");
Serial.println(ESP_FAIL);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
} else {
Serial.print("***");
Serial.println(ESP_FAIL);
httpd_resp_send_404(req);
return ESP_FAIL;
}
int res = 0;
if(!strcmp(cmd, "F")) {
Serial.println("Forward");
// digitalWrite(DRV_A, LOW);
// digitalWrite(DRV_B, HIGH);
// digitalWrite(DIR_A, LOW);
// digitalWrite(DIR_B, HIGH);
Serial1.println("F"); // 发送前进指令
analogWrite(DRV_A, 0);
analogWrite(DRV_B, speed1);
analogWrite(DIR_A, 0);
analogWrite(DIR_B, speed2);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "B")) {
Serial.println("Backward");
// digitalWrite(DRV_A, HIGH);
// digitalWrite(DRV_B, LOW);
// digitalWrite(DIR_A, HIGH);
// digitalWrite(DIR_B, LOW);
Serial1.println("B"); // 发送后退指令
analogWrite(DRV_A, speed1);
analogWrite(DRV_B, 0);
analogWrite(DIR_A, speed2);
analogWrite(DIR_B, 0);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "L")) {
Serial.println("Turn Left");
// digitalWrite(DRV_A, HIGH);
// digitalWrite(DRV_B, LOW);
// digitalWrite(DIR_A, LOW);
// digitalWrite(DIR_B, HIGH);
Serial1.println("L"); // 发送左转指令
analogWrite(DRV_A, speed1);
analogWrite(DRV_B, 0);
analogWrite(DIR_A, 0);
analogWrite(DIR_B, speed2);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "R")) {
Serial.println("Turn Right");
Serial1.println("R"); // 发送右转指令
analogWrite(DRV_A, 0);
analogWrite(DRV_B, speed1);
analogWrite(DIR_A, speed2);
analogWrite(DIR_B, 0);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "G")) {
Serial.println("Forward Left");
analogWrite(DRV_A, 0);
analogWrite(DRV_B, 0);
analogWrite(DIR_A, 0);
analogWrite(DIR_B, speed2);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "H")) {
Serial.println("Backward Left");
analogWrite(DRV_A, speed1);
analogWrite(DRV_B, 0);
analogWrite(DIR_A, 0);
analogWrite(DIR_B, 0);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "I")) {
Serial.println("Forward Right");
analogWrite(DRV_A, 0);
analogWrite(DRV_B, speed1);
analogWrite(DIR_A, 0);
analogWrite(DIR_B, 0);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "J")) {
Serial.println("Backward Right");
analogWrite(DRV_A, 0);
analogWrite(DRV_B, 0);
analogWrite(DIR_A, speed2);
analogWrite(DIR_B, 0);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "S")) {
Serial.println("Stop");
Serial1.println("S"); // 发送停止指令
analogWrite(DRV_A, 0);
analogWrite(DRV_B, 0);
analogWrite(DIR_A, 0);
analogWrite(DIR_B, 0);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
// else if(!strcmp(cmd, "V")) {
// Serial.println("Horn On");
// digitalWrite(buzzerPin, HIGH);
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, "OK", 2);
// }
// else if(!strcmp(cmd, "v")) {
// Serial.println("Horn Off");
// digitalWrite(buzzerPin, LOW);
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, "OK", 2);
// }
else if(!strcmp(cmd, "T")) {
speed1=105; //左
speed2=105;
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "Y")) {
speed1=165;
speed2=165;
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "U")) {
speed1=255;
speed2=255;
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
// else if(!strcmp(cmd, "W")) {
// Serial.println("LED On");
// ledcWrite(7, ledVal);
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, "OK", 2);
// }
else if(!strcmp(cmd, "w")) {
Serial.println("LED Off");
Serial1.println("w"); // 发送关灯指令
ledcWrite(7, 0);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
// else if (!strcmp(cmd, "x")){
// Serial.println("Flash Light : Low (20)");
// ledVal = 20;
// ledcWrite(7, ledVal);
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, "OK", 2);
// }
// else if (!strcmp(cmd, "y")){
// Serial.println("Flash Light : Medium (50)");
// ledVal = 50;
// ledcWrite(7, ledVal);
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, "OK", 2);
// }
// else if (!strcmp(cmd, "z")){
// Serial.println("Flash Light : Bright (100)");
// ledVal = 100;
// ledcWrite(7, ledVal);
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, "OK", 2);
// }
else if (!strcmp(cmd, "Z")){
Serial.println("Flash Light : Super Bright (255)");
Serial1.println("Z"); // 发送开灯指令
ledVal = 255;
ledcWrite(7, ledVal);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "a")){
Serial.println("Servo q (0)");
// ledcWrite(8, 400);
myservo.write(110);
delay(100);
myservo.write(90);
delay(100);
digitalWrite(servoPin, LOW);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "b")){
Serial.println("Servo q (6500)");
// ledcWrite(8, 6000);
myservo.write(70);
delay(100);
myservo.write(90);
delay(100);
digitalWrite(servoPin, LOW);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
// else if (!strcmp(cmd, "n")){
// EEPROM.begin(EEPROM_Size); //开启EEPROM
// EEPROM_dataT=EEPROM.read(EEPROM_speedT);
// Serial.printf("last_EEPROM_speed:%d",EEPROM_dataT);
// if (EEPROM_dataT<60)
// EEPROM_dataT=EEPROM_dataT+1;
// Serial.printf("now_EEPROM_speed:%d",EEPROM_dataT);
// EEPROM.write(EEPROM_speedT,EEPROM_dataT);
// EEPROM.commit();
// String response = String(EEPROM_dataT); // 将整数转换为字符串
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req,response.c_str(), response.length());
// }
// else if (!strcmp(cmd, "m")){
// EEPROM.begin(EEPROM_Size); //开启EEPROM
// EEPROM_dataT=EEPROM.read(EEPROM_speedT);
// Serial.printf("last_EEPROM_speed:%d",EEPROM_dataT);
// if (EEPROM_dataT>0)
// EEPROM_dataT=EEPROM_dataT-1;
// Serial.printf("now_EEPROM_speed:%d",EEPROM_dataT);
// EEPROM.write(EEPROM_speedT,EEPROM_dataT);
// EEPROM.commit();
// String response = String(EEPROM_dataT); // 将整数转换为字符串
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, response.c_str(), response.length());
// }
// else if (!strcmp(cmd, "h")){
// EEPROM.begin(EEPROM_Size); //开启EEPROM
// EEPROM_dataT=EEPROM.read(EEPROM_speedT);
// Serial.printf("last_EEPROM_speed:%d",EEPROM_dataT);
// Serial.printf("now_EEPROM_speed:%d",EEPROM_dataT);
// EEPROM.write(EEPROM_speedT,EEPROM_dataT);
// EEPROM.commit();
// speed1=125+EEPROM_dataT;
// speed2=155;
// String response = String(EEPROM_dataT); // 将整数转换为字符串
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req,"OK", 2);
// }
// else if (!strcmp(cmd, "j")){
// EEPROM.begin(EEPROM_Size); //开启EEPROM
// EEPROM_dataY=EEPROM.read(EEPROM_speedY);
// Serial.printf("last_EEPROM_speed:%d",EEPROM_dataY);
// if (EEPROM_dataY>0)
// EEPROM_dataY=EEPROM_dataY+1;
// Serial.printf("now_EEPROM_speed:%d",EEPROM_dataY);
// EEPROM.write(EEPROM_speedY,EEPROM_dataY);
// EEPROM.commit();
// // speed1=speed1d+EEPROM_data;
// String response = String(EEPROM_dataY); // 将整数转换为字符串
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, response.c_str(), response.length());
// }
// else if (!strcmp(cmd, "k")){
// EEPROM.begin(EEPROM_Size); //开启EEPROM
// EEPROM_dataY=EEPROM.read(EEPROM_speedY);
// Serial.printf("last_EEPROM_speed:%d",EEPROM_dataY);
// if (EEPROM_dataY>0)
// EEPROM_dataY=EEPROM_dataY-1;
// Serial.printf("now_EEPROM_speed:%d",EEPROM_dataY);
// EEPROM.write(EEPROM_speedY,EEPROM_dataY);
// EEPROM.commit();
// // speed1=speed1d+EEPROM_data;
// String response = String(EEPROM_dataY); // 将整数转换为字符串
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, response.c_str(), response.length());
// }
// else if (!strcmp(cmd, "i")){
// EEPROM.begin(EEPROM_Size); //开启EEPROM
// EEPROM_dataU=EEPROM.read(EEPROM_speedU);
// Serial.printf("last_EEPROM_speed:%d",EEPROM_dataU);
// if (EEPROM_dataU>0)
// EEPROM_dataU=EEPROM_dataU+1;
// Serial.printf("now_EEPROM_speed:%d",EEPROM_dataU);
// EEPROM.write(EEPROM_speedU,EEPROM_dataU);
// EEPROM.commit();
// // speed1=speed1d+EEPROM_data;
// String response = String(EEPROM_dataU); // 将整数转换为字符串
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, response.c_str(), response.length());
// }
// else if (!strcmp(cmd, "o")){
// EEPROM.begin(EEPROM_Size); //开启EEPROM
// EEPROM_dataU=EEPROM.read(EEPROM_speedU);
// Serial.printf("last_EEPROM_speed:%d",EEPROM_dataU);
// if (EEPROM_dataU>0)
// EEPROM_dataU=EEPROM_dataU-1;
// Serial.printf("now_EEPROM_speed:%d",EEPROM_dataU);
// EEPROM.write(EEPROM_speedU,EEPROM_dataU);
// EEPROM.commit();
// // speed1=speed1d+EEPROM_data;
// String response = String(EEPROM_dataU); // 将整数转换为字符串
// httpd_resp_set_type(req, "text/html");
// return httpd_resp_send(req, response.c_str(), response.length());
// }
else {
res = -1;
}
if(res){
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
// static esp_err_t data_handler(httpd_req_t *req) {
// char buf[1024]; // 增加缓冲区大小
// int ret, remaining = req->content_len;
// char request_data[1024]; // 增加缓冲区大小
// int data_index = 0;
// while (remaining > 0) {
// ret = httpd_req_recv(req, buf, MIN(remaining, sizeof(buf)));
// if (ret <= 0) {
// if (ret == HTTPD_SOCK_ERR_TIMEOUT) {
// httpd_resp_send_408(req);
// } else {
// httpd_resp_send_500(req);
// return ESP_FAIL;
// }
// for (int i = 0; i < ret; i++) {
// request_data[data_index] = buf[i];
// data_index++;
// }
// remaining -= ret;
// }
// // 解析JSON数据
// cJSON *root = cJSON_Parse(request_data);
// if (root == NULL) {
// // JSON解析失败
// httpd_resp_send_500(req);
// return ESP_FAIL;
// }
// // 获取JSON对象中的数据项
// cJSON *value1 = cJSON_GetObjectItem(root, "value1");
// cJSON *value2 = cJSON_GetObjectItem(root, "value2");
// if (value1 == NULL || value2 == NULL) {
// // JSON数据项不存在
// //httpd_resp_send_400(req); // 使用400 Bad Request
// httpd_resp_send_err(req, HTTPD_400_BAD_REQUEST, "Bad Request");
// cJSON_Delete(root);
// return ESP_FAIL;
// }
// // 将数据项转换为整数
// int intValue1 = value1->valueint;
// int intValue2 = value2->valueint;
// // 打印解析后的数据
// printf("Received JSON data - value1: %d, value2: %d\n", intValue1, intValue2);
// cJSON_Delete(root);
// // 发送响应给客户端
// httpd_resp_set_type(req, "text/plain");
// httpd_resp_send(req, "JSON data received and processed", -1);
// return ESP_OK;
// }
// }
// 这是启动相机服务器的函数,它会注册URI处理程序,包括视频流处理程序
void startCameraServer(){
httpd_config_t config = HTTPD_DEFAULT_CONFIG();
httpd_uri_t status_uri = {
.uri = "/status",
.method = HTTP_GET,
.handler = status_handler,
.user_ctx = NULL
};
httpd_uri_t cmd_uri = {
.uri = "/control",
.method = HTTP_GET,
.handler = cmd_handler,
.user_ctx = NULL
};
httpd_uri_t capture_uri = {
.uri = "/capture",
.method = HTTP_GET,
.handler = capture_handler,
.user_ctx = NULL
};
httpd_uri_t stream_uri = {
.uri = "/stream",
.method = HTTP_GET,
.handler = stream_handler,
.user_ctx = NULL
};
httpd_uri_t state_uri = {
.uri = "/state",
.method = HTTP_GET,
.handler = state_handler,
.user_ctx = NULL
};
// httpd_uri_t data_uri = {
// .uri = "/data",
// .method = HTTP_GET,
// .handler = data_handler,
// .user_ctx = NULL
// };
Serial.printf("Starting web server on port: '%d'", config.server_port);
if (httpd_start(&camera_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(camera_httpd, &cmd_uri);
httpd_register_uri_handler(camera_httpd, &capture_uri);
httpd_register_uri_handler(camera_httpd, &status_uri);
httpd_register_uri_handler(camera_httpd, &state_uri);
// httpd_register_uri_handler(camera_httpd, &data_uri);
}
config.server_port += 1;
config.ctrl_port += 1;
Serial.printf("Starting stream server on port: '%d'", config.server_port);
if (httpd_start(&stream_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(stream_httpd, &stream_uri);
}
} 复制代码







 沪公网安备31011502402448
沪公网安备31011502402448


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






