|
17394| 6
|
[项目] 玩转舵机 | 三轴机械臂 |
 图片来源于网络 在一些科技馆,我们可以看到一些机器人表演,其中就有多轴机械臂,或舞剑,或倒茶,动作灵活精准。我们用几个舵机也可以做出一个机械臂玩一玩。通过旋钮开关来控制各个轴的转动,从而实现模拟手臂的动作。这个项目,再网上已经有人做过,但是我没看到具体的教程,所以将制作过程记录下来供大家参考。本项目可用来学习舵机的使用和“映射”积木的使用。 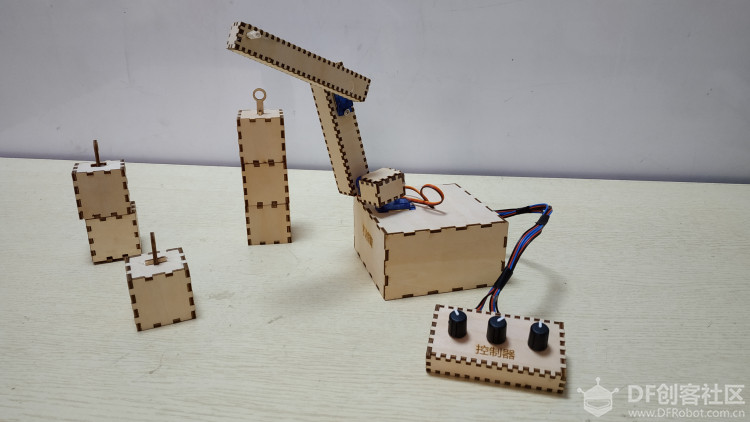 功能介绍 通过调节旋钮开关的角度,控制三个舵机角度的改变,从而实现左右、上下移动,以完成一些基本任务。 演示视频 三轴机械臂演示 制作过程 No.1 准备材料  材料清单: Arduino主控板 1块 DF V7.1扩展板 1块 电位器 3个 180°舵机 3个 No.2 硬件搭建  3个电位器分别接到A1、A3、A5引脚 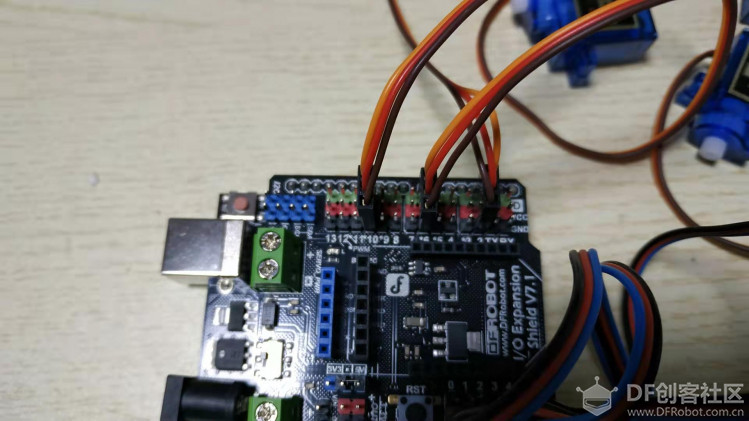 3个舵机分别接到2、6、10引脚 No.3 编写程序 利用Mind+ V1.6.1编写程序。 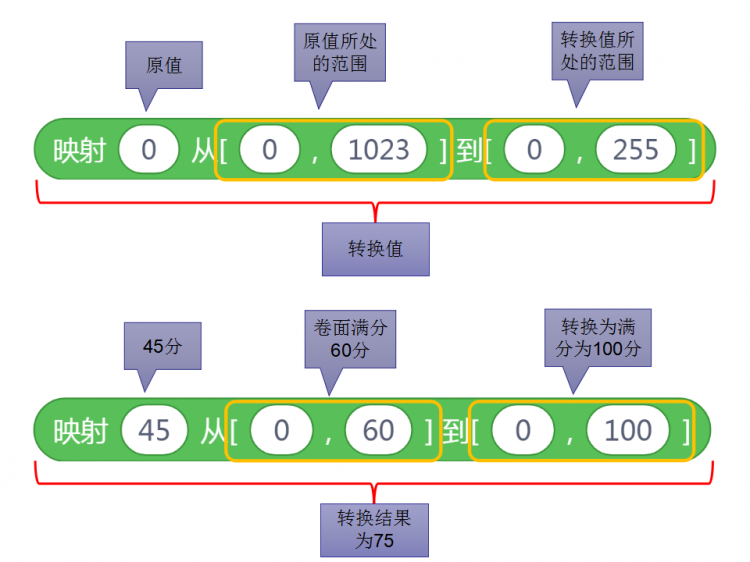 映射积木,在【运算符】模块内,其功能是将某个范围内的数值转换为另一个范围内的数值。例如:某个同学在英语考试中得了45分(卷面总分为60),如果要将该分数转换成百分制的成绩,就可以用上图所示的方式实现。 在本项目中,需要将电位器的模拟输入值(范围:0~1023)转换为范围在0~180的数值,以供舵机模块使用。  机械臂程序 编写好程序后,上传到主控板,测试是否能实现预定功能。 No.4 设计激光切割图纸 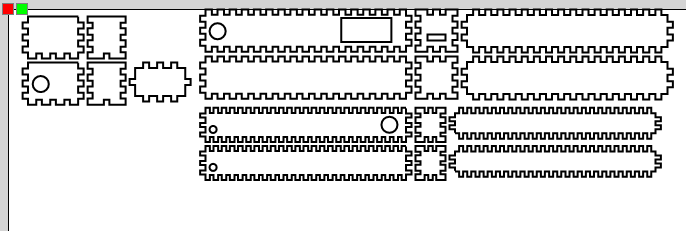 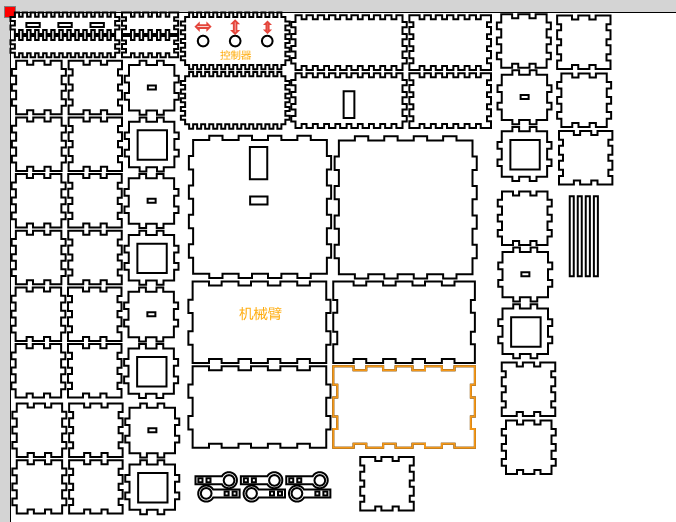 设计软件:LaserMaker No.5 重置舵机的角度 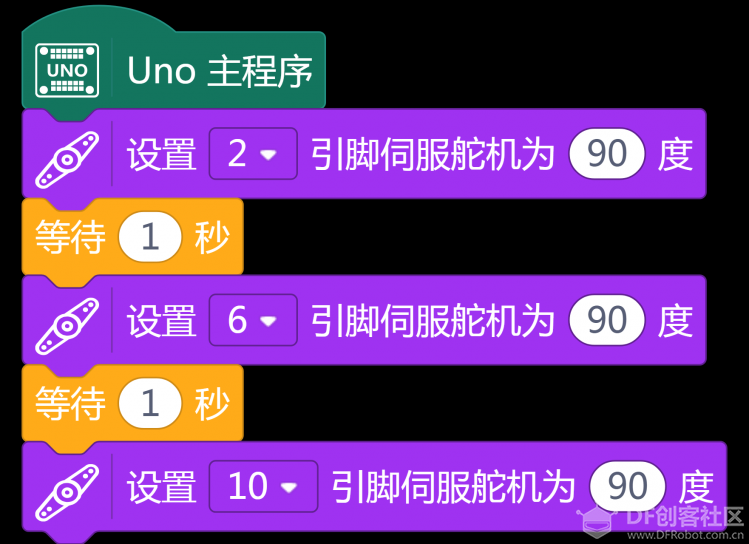 重新编写一个程序,上传到主控板,将3个舵机置于90度。然后将舵机和电位器全部拆下,待与椴木板件组合。 No.6 组装盒体 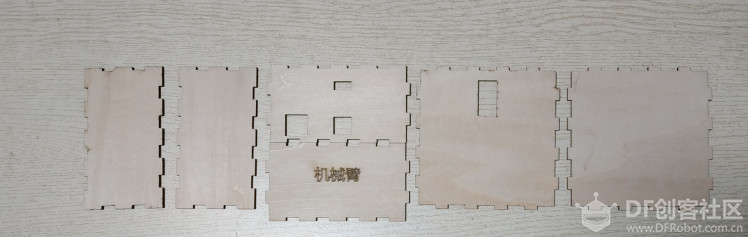 找到底盒的6块木板  组装好其中的5片 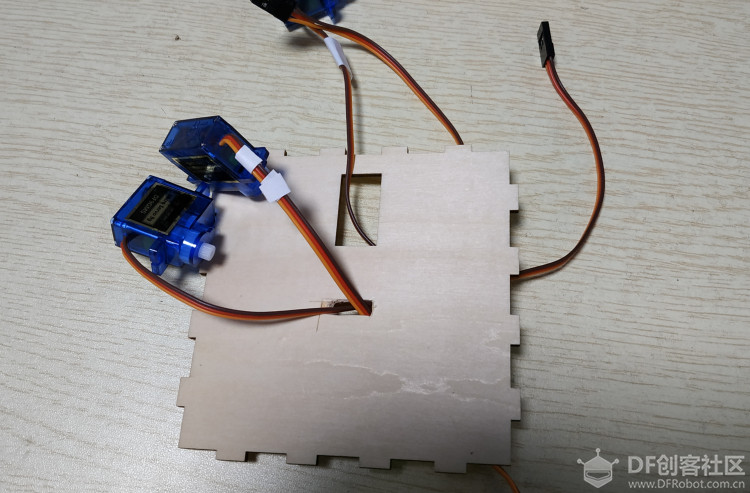 将3个舵机的线按上图所示方式穿过底盒的顶板;为了后续工作的方便,可以为3个舵机做好标记。 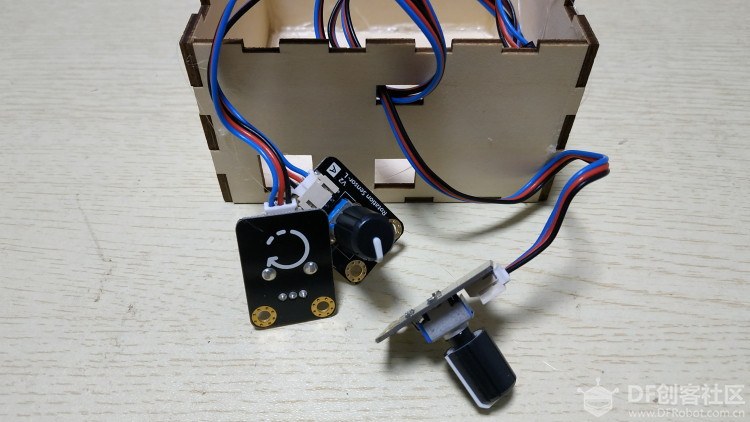 将3个电位器的线按上图所示方式穿过底盒背板的上口。 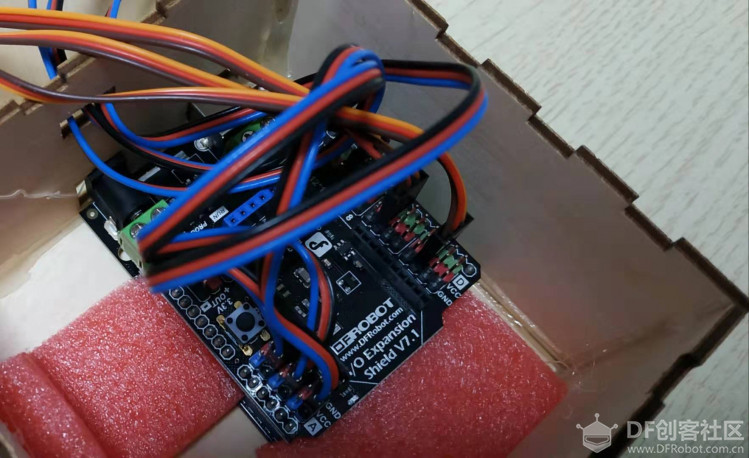 将主控板固定到盒体内,重新连接好舵机和电位器。 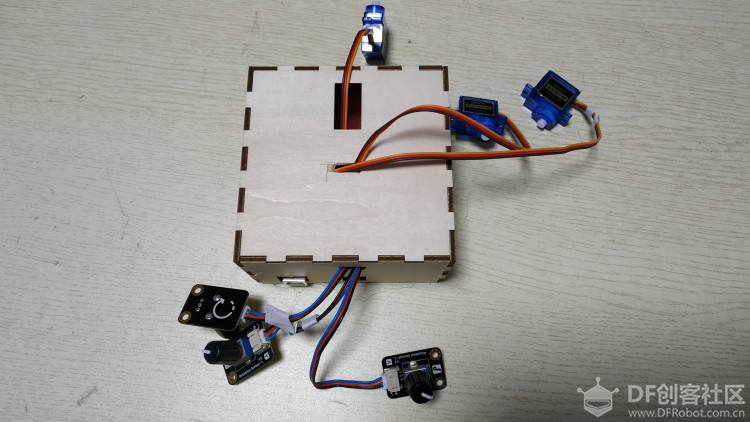 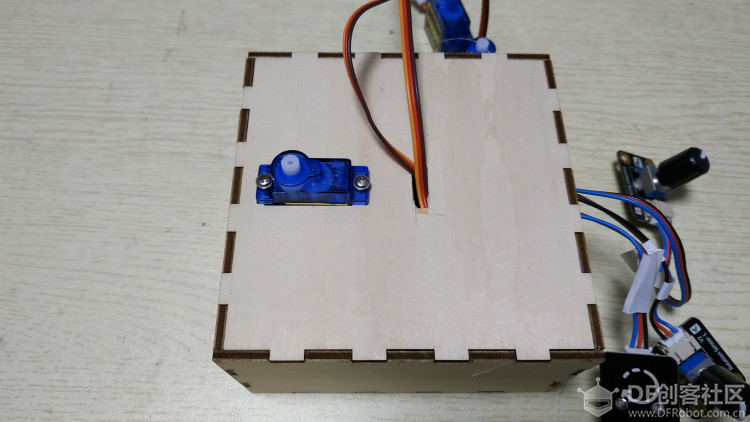 盖上顶板,第1个舵机固定在预留槽中,用螺丝紧固。 *后面还需要打开顶板,暂时不用盖得太紧 No.7 安装第2个舵机 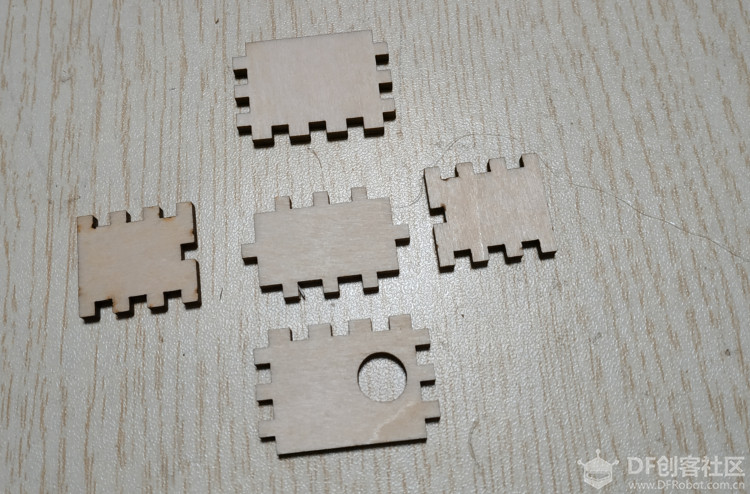 找出如上图所示的5块小木板 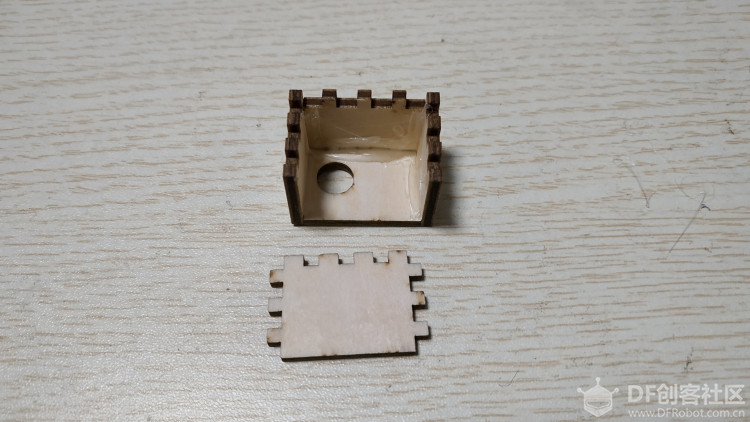 组装好其中的4面  将舵臂用热熔胶固定到底板上 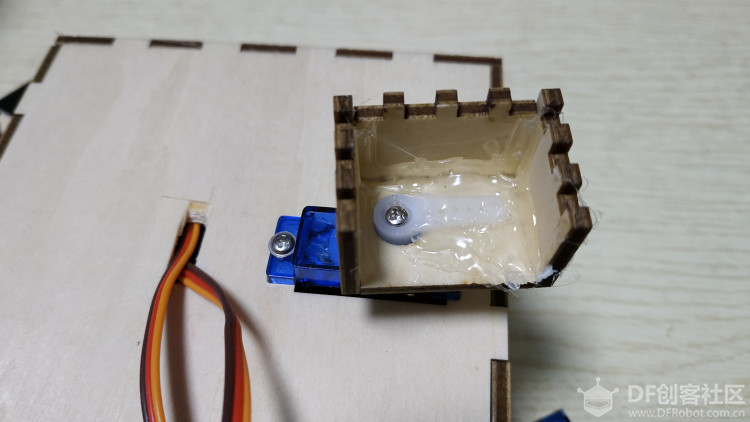 将组装好的部件安装到第1个舵机的轴上,用螺丝紧固 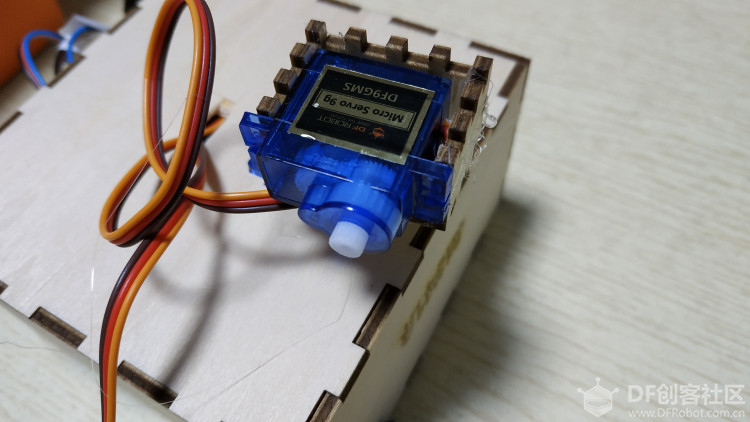 将第2个舵机卡进去,装上顶板 No.8 安装第1段臂体 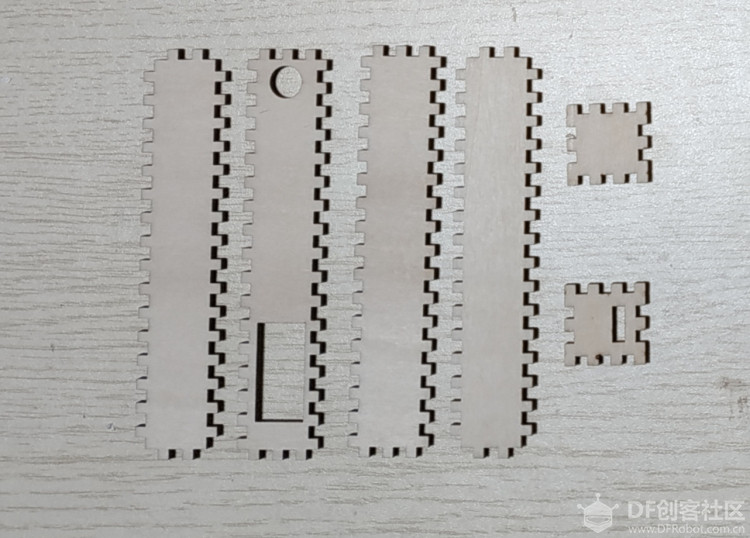 找到如上图所示的6块木板 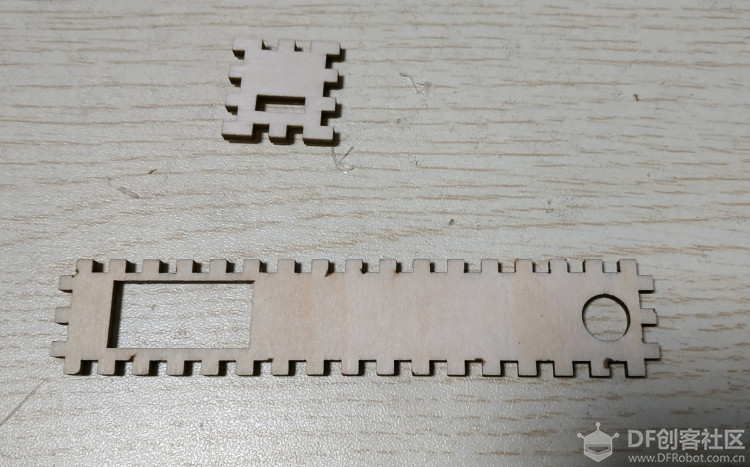 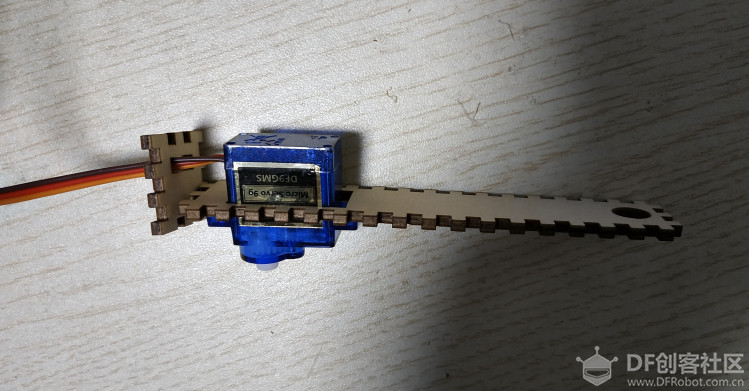 拔下第3个舵机的线,从上图所示的两块木板件中穿出,再重新连接到主控板。(这一步可以在组装底盒前完成,就不需要再次拔线了) 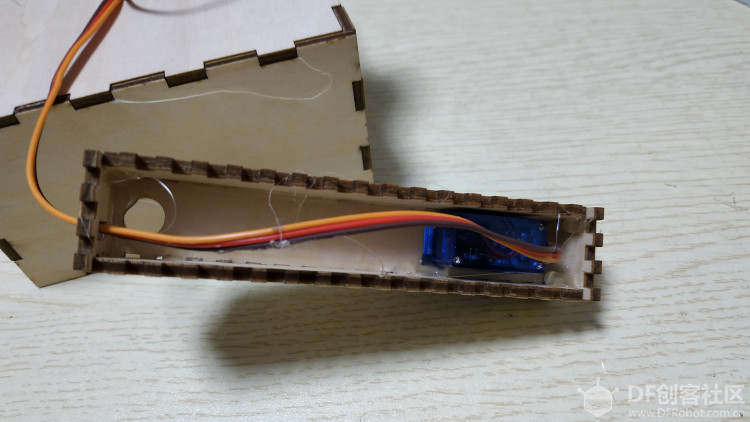 安装好其中的5块木板 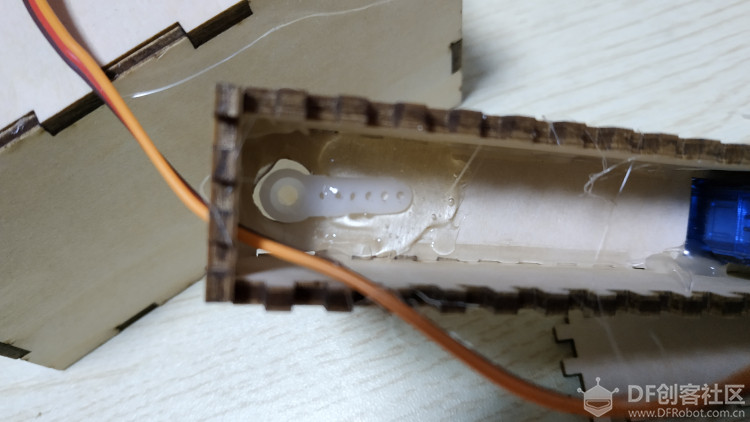 将舵臂固定  固定到第2个舵机的轴上,用螺丝固定。 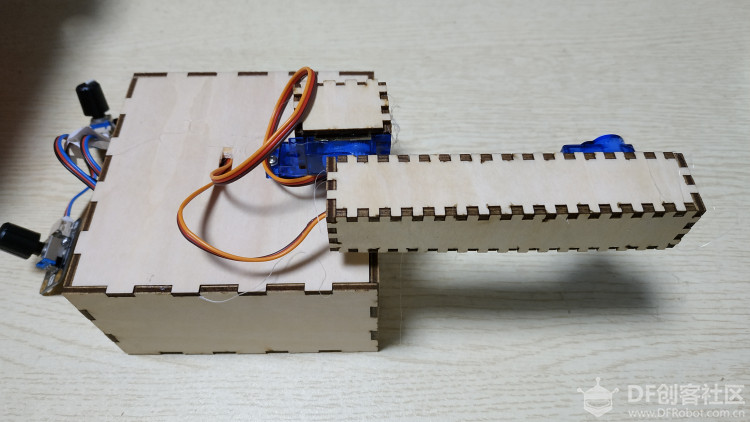 装上最后一块木板 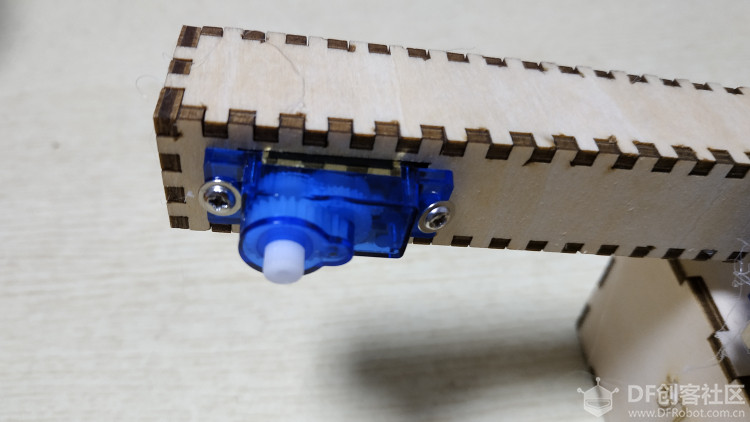 用螺丝固定舵机 No.9 安装第2段臂体 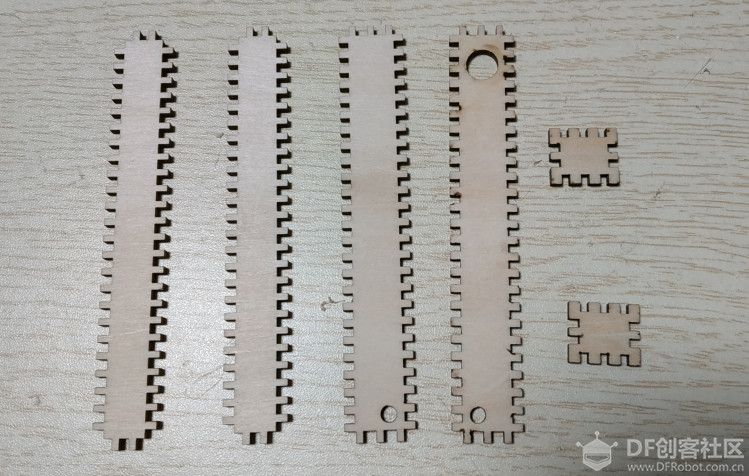 找到如上图所示的6块木板 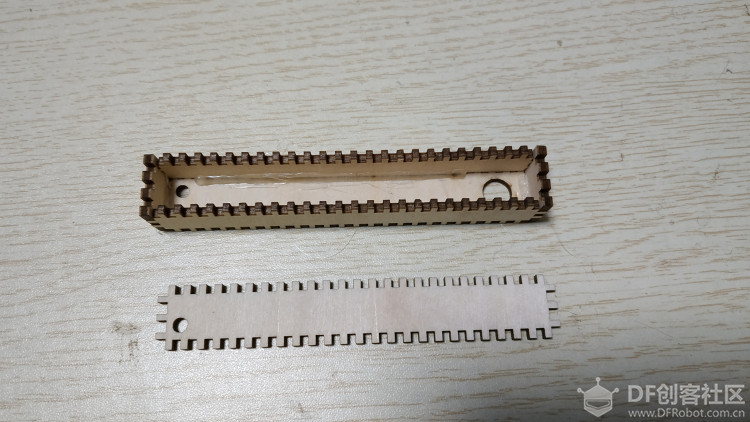 先安装其中的5块木板  固定舵臂 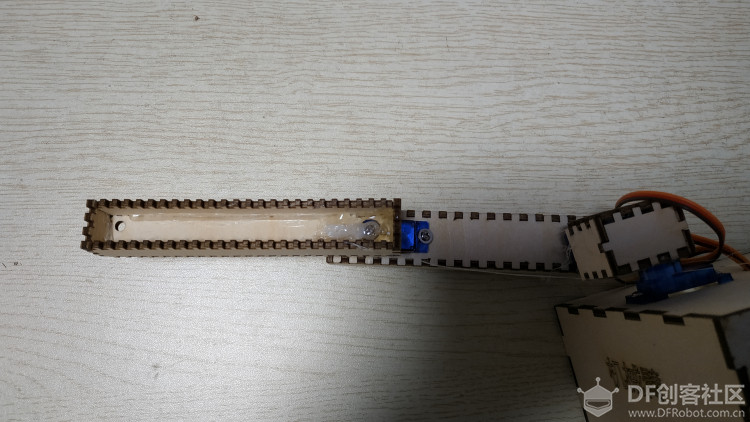 安装到第3个舵机上 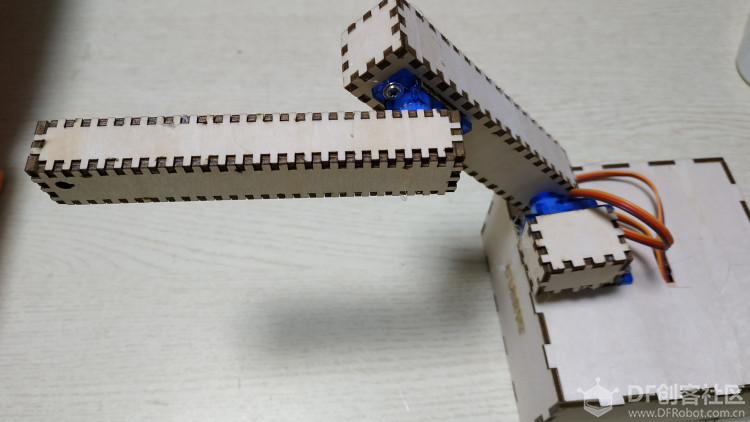 装上最后一块木板 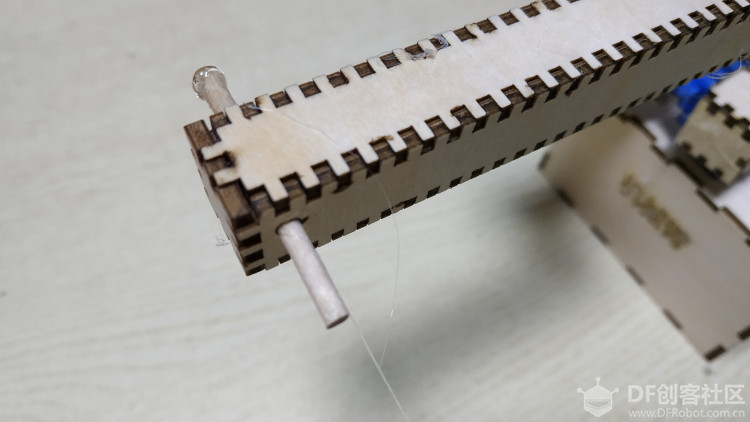 装上一根小木棒,作为吊钩 No.10 组装控制器 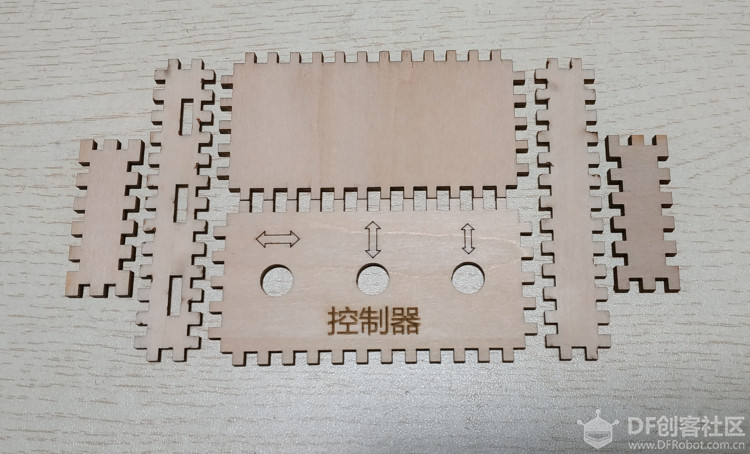 找到如上图所示的6块木板 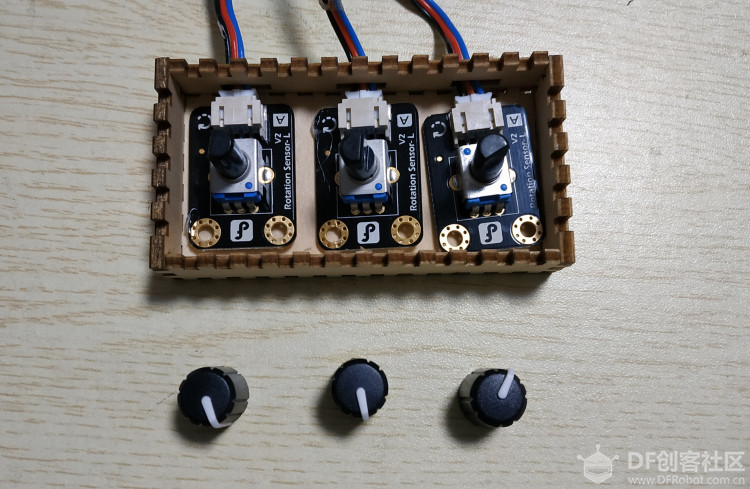 组装好其中的5块木板;将模拟角度木块的线拔下,从侧板预留的3个口中穿过,再重新插在主控板的引脚;拔下旋帽。(在组装底盒前完成这一步也可以省去再次拔插的麻烦)  装上顶板 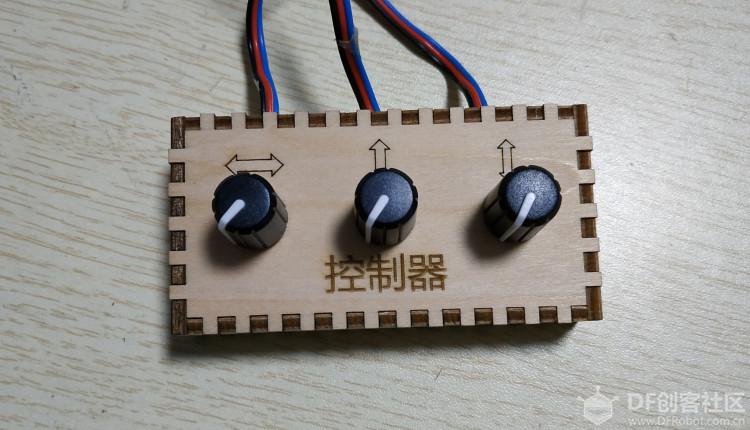 装上旋帽 No.11 组装任务盒子 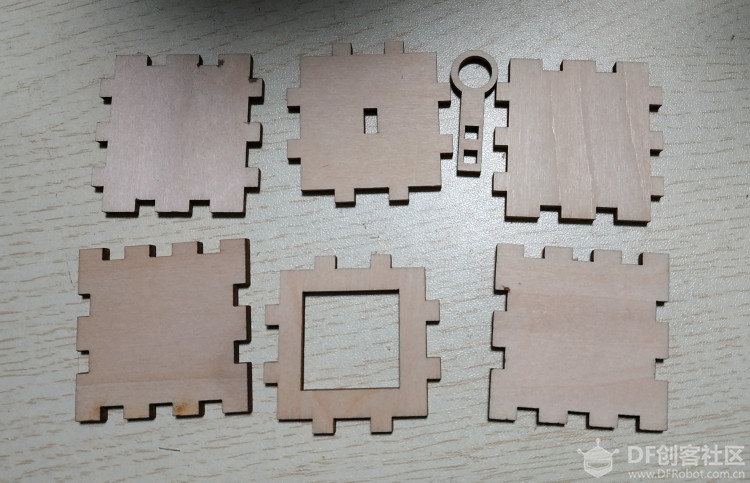  找到如上图所示的木板,将木条截成1cm左右的小段 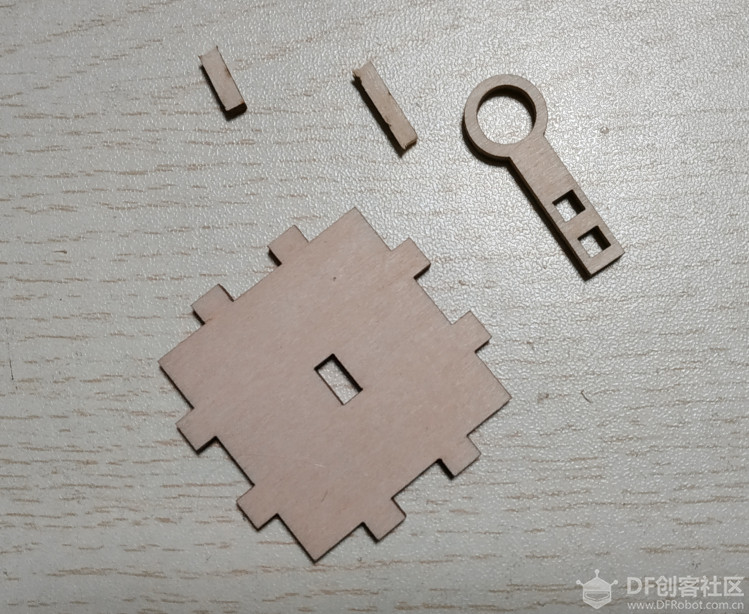  将有吊孔的木板与顶板组装在一起   安装好其他5块木板,镂空的板子作为底板;然后与顶板组合成一体。 No.12 重新上传程序并调试 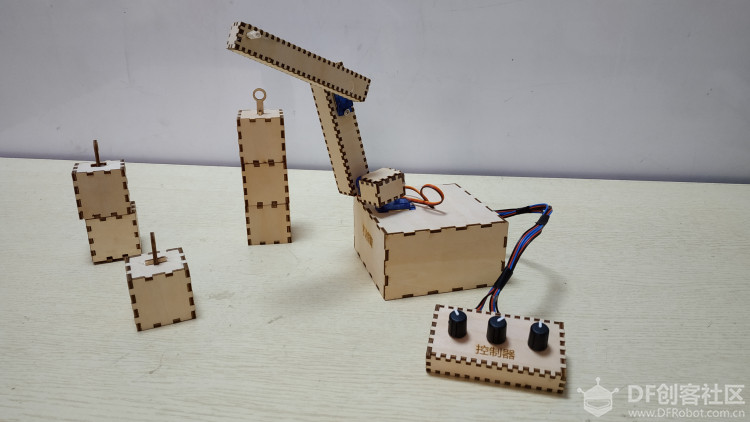 将程序重新上传到主控板,根据运行情况进行适当调整。 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








