|
7846| 10
|
[项目] 真能拔腿撒欢的智能马车 |

 去年受到“纸板人力车”的启发,制作了一辆纸板马车,用了两个TT马达和一个9V电池作为驱动部件。后来一直想给它进行智能化改造,上个月用Arduino作为主控做了一个带遥控功能和超声波侦测的版本,算是V2版本吧,教程一直没写。因为朱现伟老师建议我拿来参加线上创客比赛。比赛正好有免费的激光切割服务,加上主控改为掌控板,所以重新做了一个新的版本,那就叫做V3版吧。外观参照了网上找到的一张马车图,功能上更接近实际,用吆喝声控制马的动作,很多朋友以为带语音识别(我手上没有2.0的掌控板),其实就是声控,你喊啥都无所谓的。 当然,这个功能其实可以拓展,无非就是加点传感器上去。  参考原型 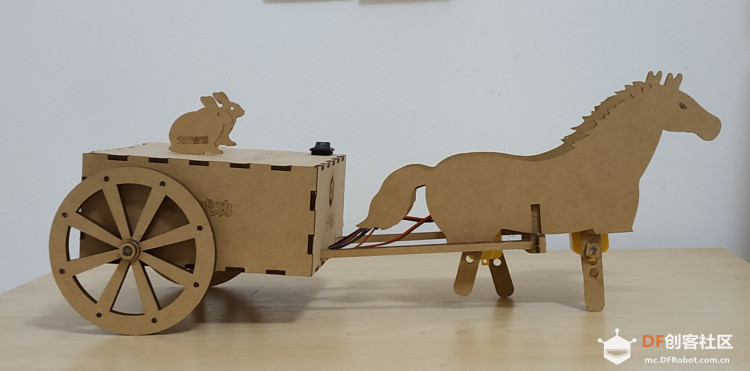 智能马车V2版 ●功能描述● 当侦测到有一定音量的声响后,同时启动两个TT马达,马车前进;当再次听到声响后,马达停止转动,马车停止。超声波侦测到前方10mm有物体时,马达停止。 ● 视频演示● 智能马车V3版演示 智能马车V2版演示 ● 制作过程● 01 材料准备 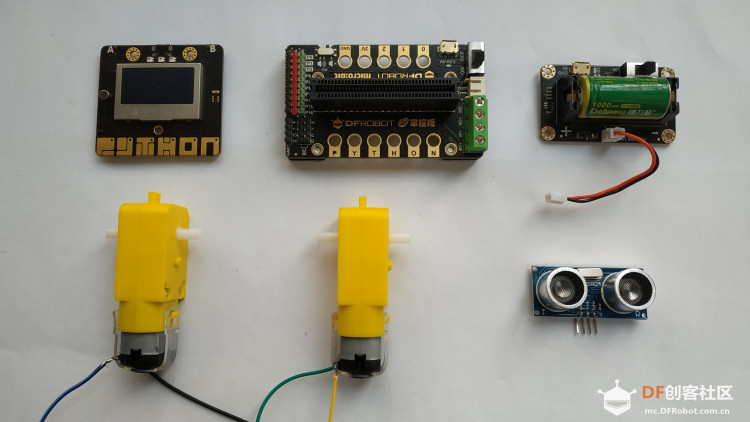 掌控板 1块 扩展板 1块 TT马达 2个 超声波模块 1个 锂电池 1个 上面的硬件方案做出的马车动力较弱,如果想和V2那样勇猛,建议用Arduino&L298N 02 硬件搭建 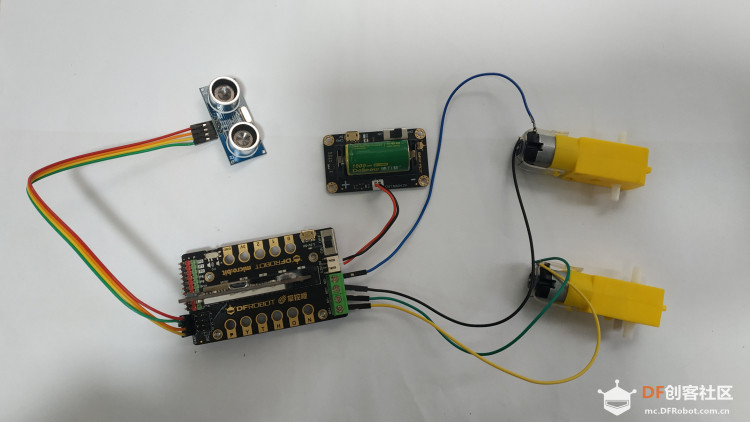 TT马达 1<——>M1 TT马达 2<——>M2 超声波模块<——>13、14 03 设计加工 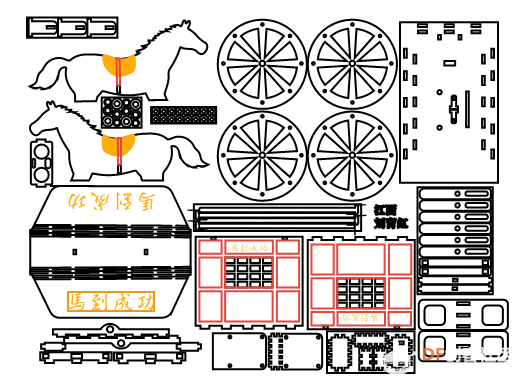 (1)设计激光切割图纸 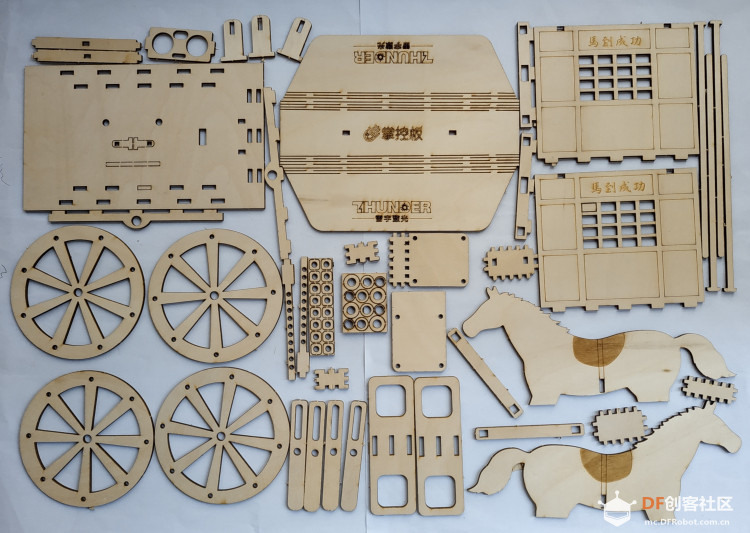 (2)利用激光切割机切割椴木板 还需准备一根直径6mm 的木棒作为车轴 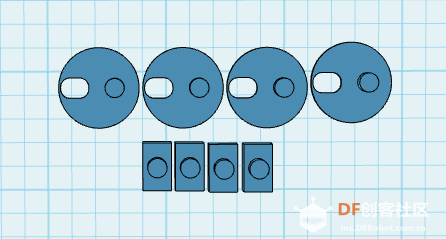 (3)设计3D图纸 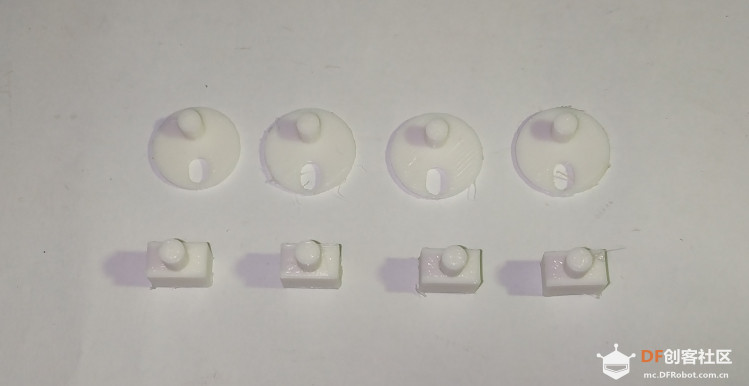 (4)打印3D结构件 04 编写程序  (1)打开mind+软件,掌控板连接电脑。   (2)添加扩展 主控板:掌控板 扩展板:掌控扩展板 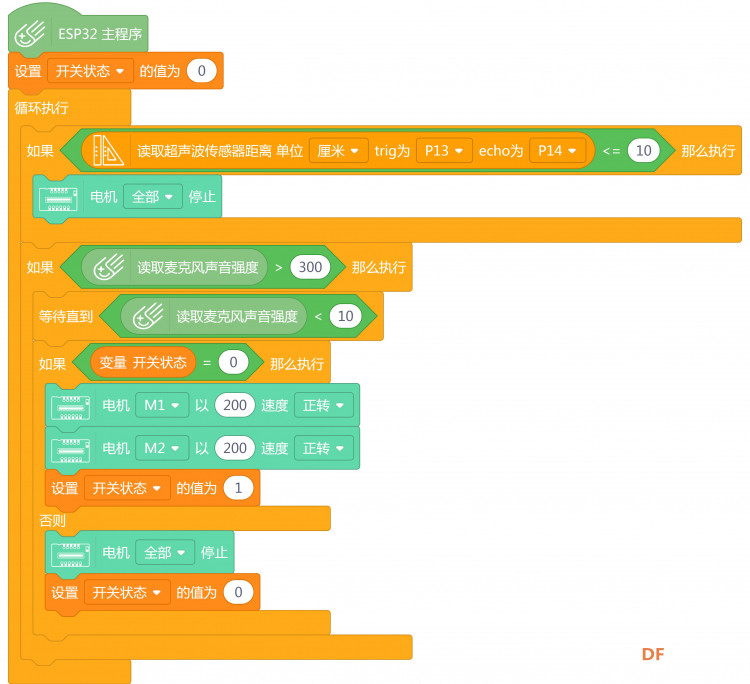 (3)编写程序 采用单按钮控制开关灯的方法,要做防抖处理,比按钮的防抖效果要差些。 吆喝时最好要干脆利落。  (4)上传程序 05 部件组装  (1)车轴固定件卡在车的底盘上 因板材厚度及激光补偿设置不同, 一般需要使用热熔胶加固 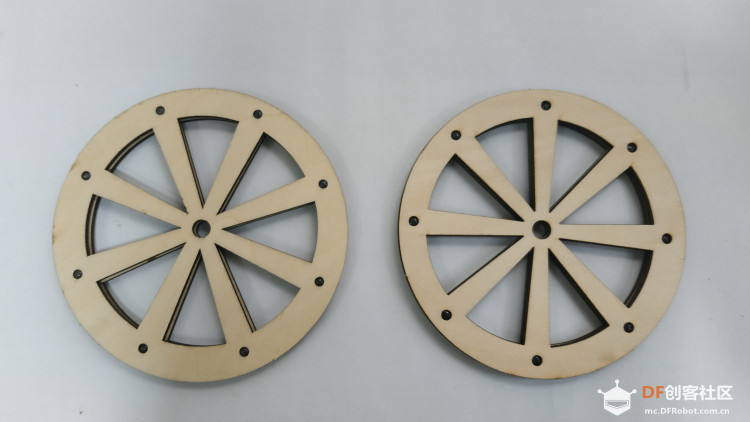 (2)将两个车轮叠放粘贴成一个 (切割了4个,为了增加厚度)  (3)一个车轮与轴连接固定  (4)穿过车底盘后装上另一个车轮 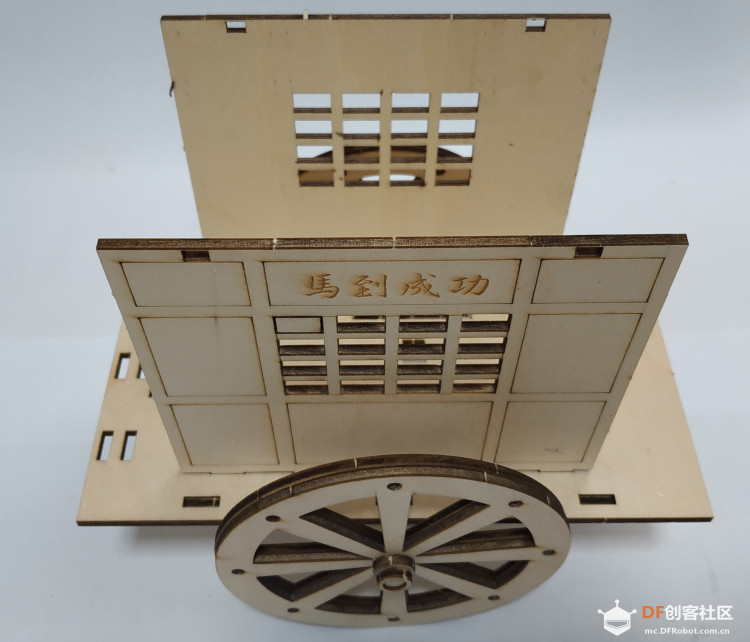 (5)装上车厢侧板  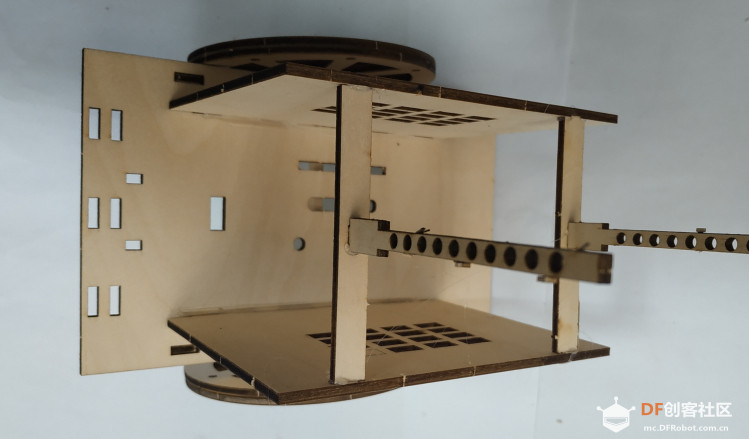 (6)装上车厢顶板支架  (7)装上车厢顶板  (8)装上拉杆固定件 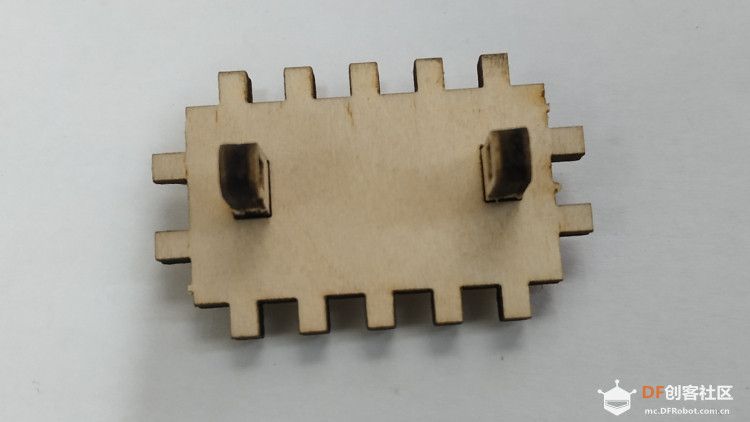   (9)组装好车夫座椅 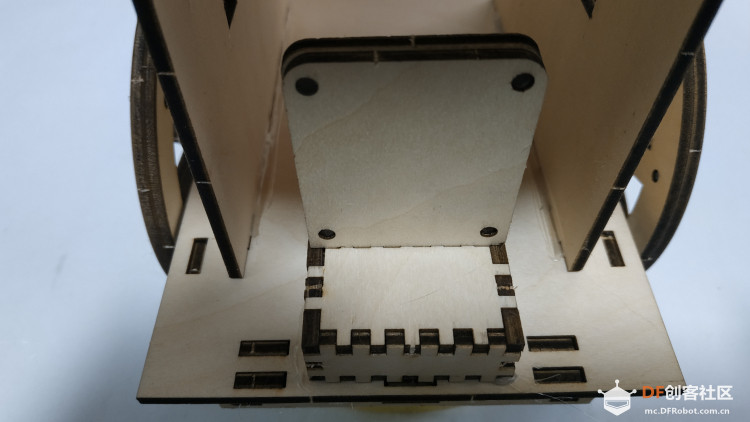  (10)装上车夫座椅,下面用木条卡紧 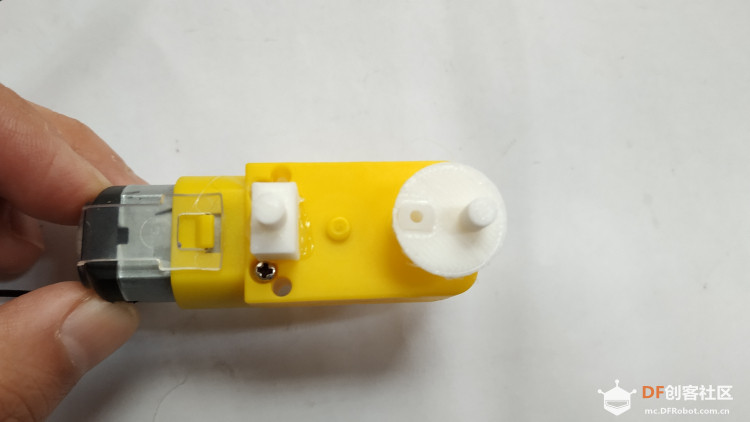 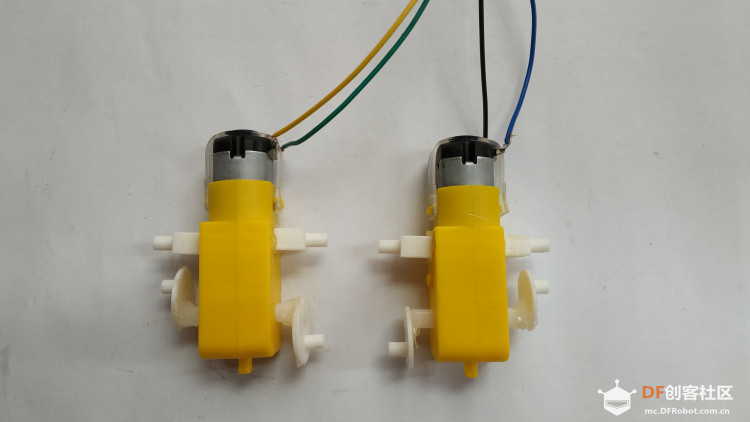 (11)安装3D结构件  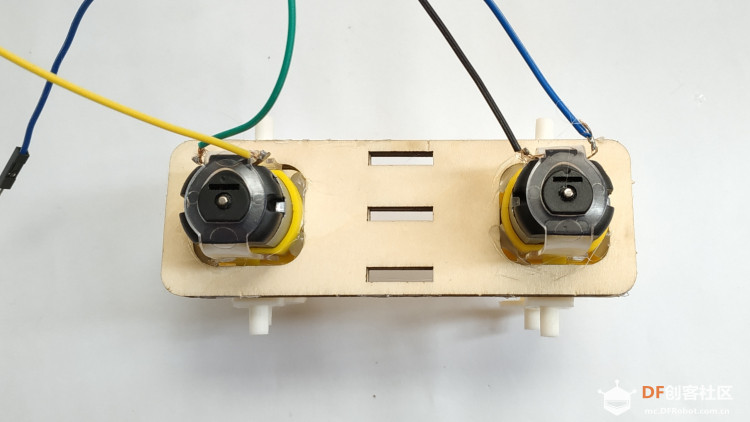  (12)将两片马达卡件叠放粘贴(同车轮) 卡紧两个马达头部  (13)安装上马脚 前后两个高低位置要相反  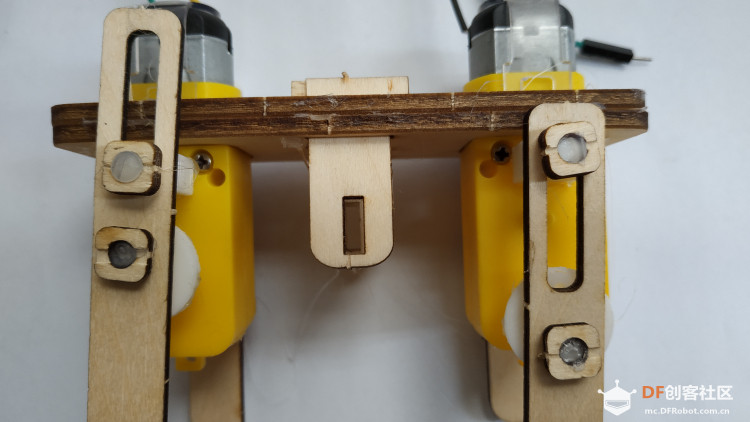 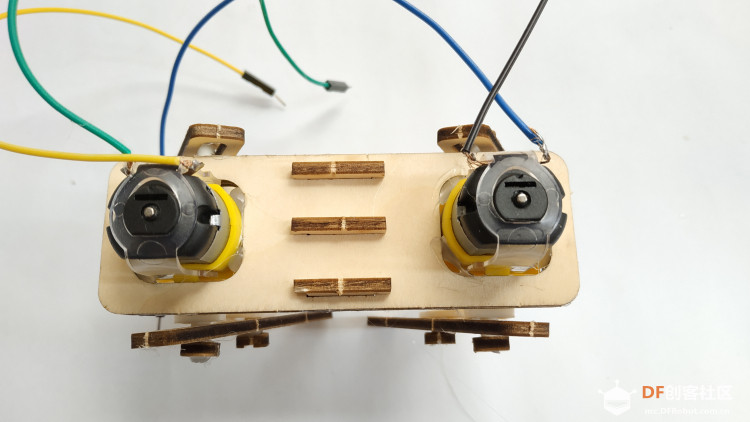 (14)将三个T型木件插紧马达卡件  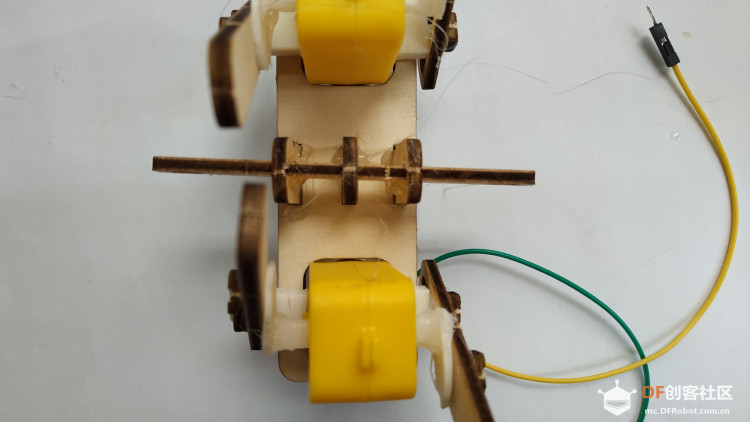 (15)将两端有正方形口的长条插进T型件 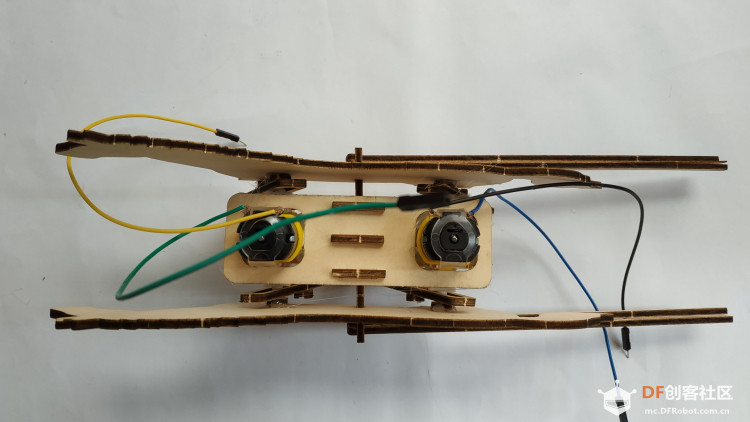  (16)安装马身部件 注意间隔,不能妨碍马脚的活动 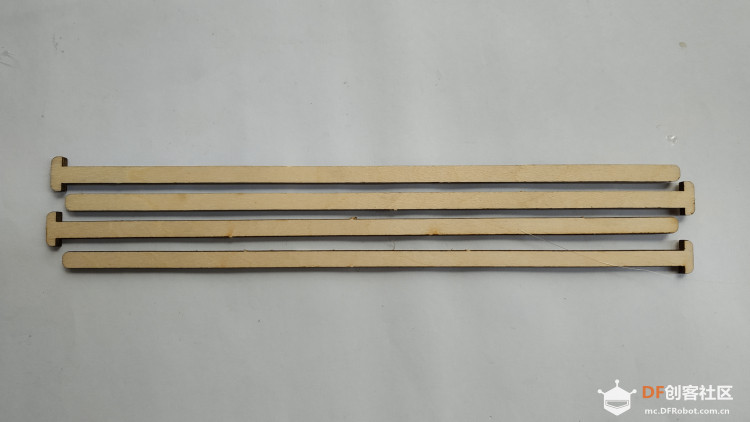  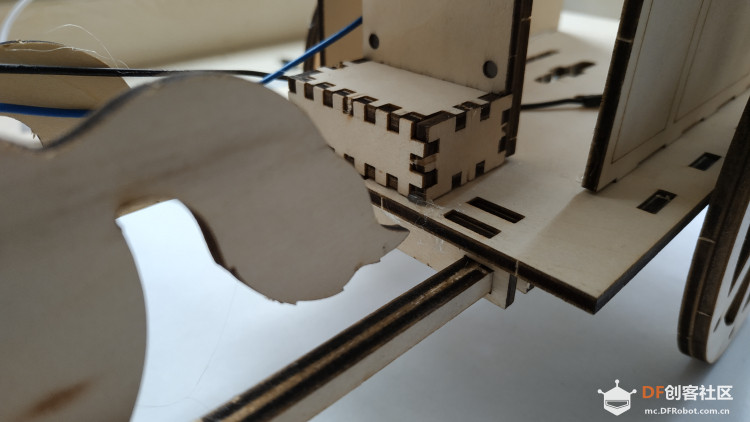 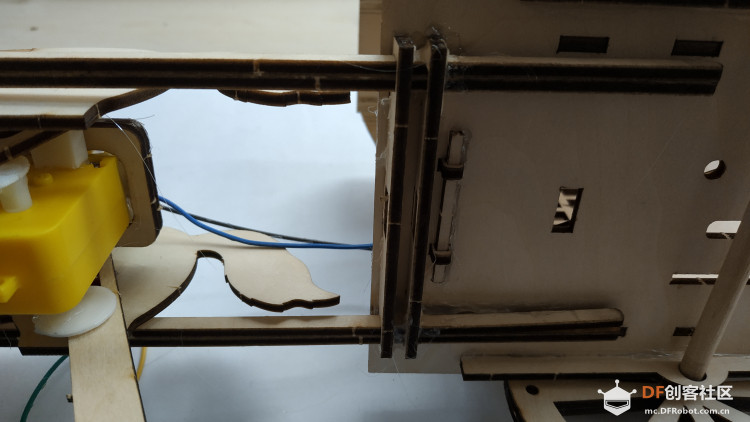 (17)用拉杆将马和车连接起来 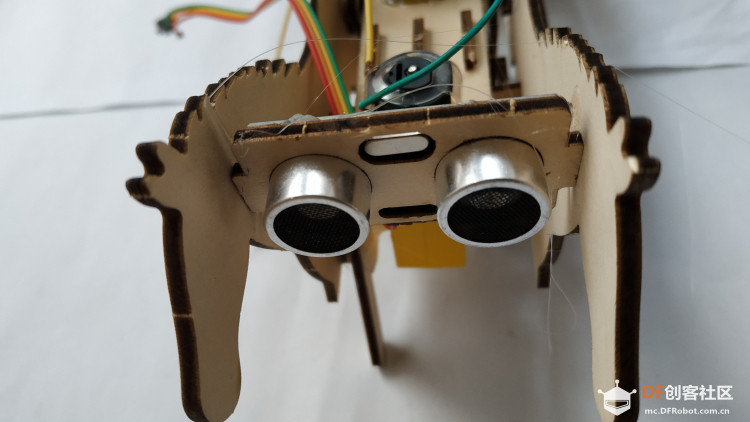 (18)安装超声波模块 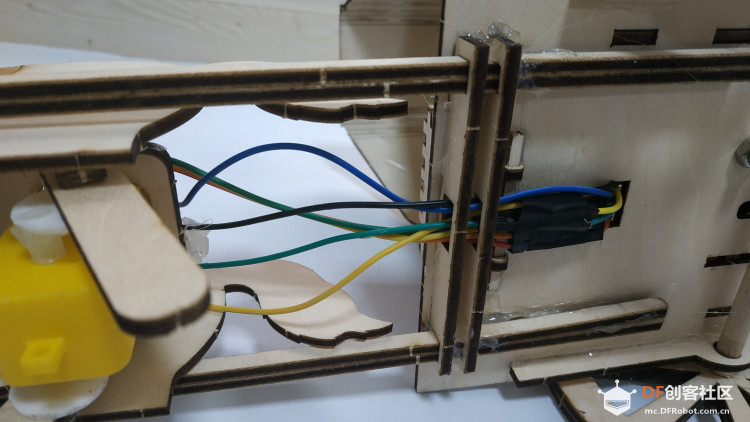 (19)将导线接长,从预留口穿到车厢内 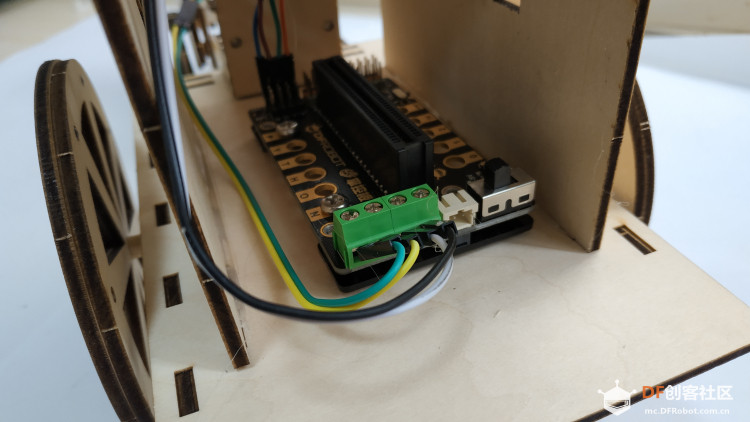 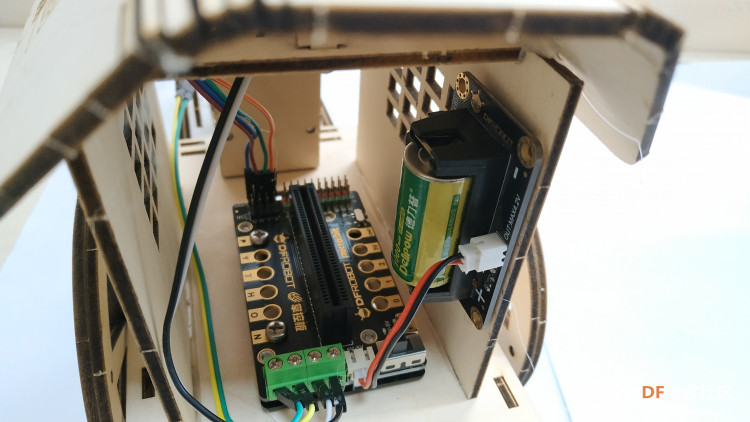 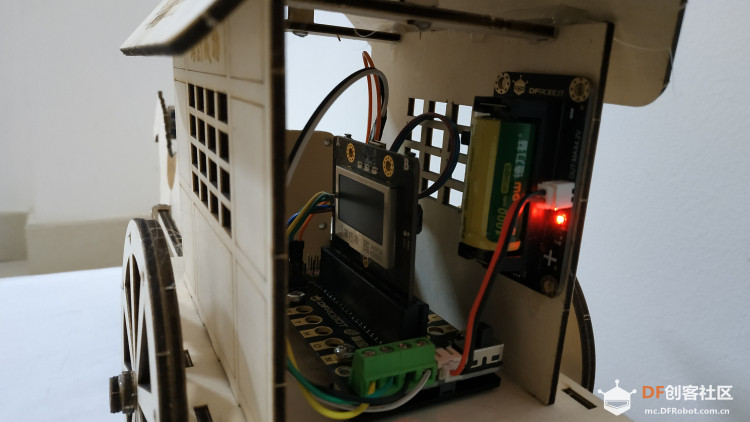 (20)固定主控板、电池座 重新连接硬件 06 测试调整  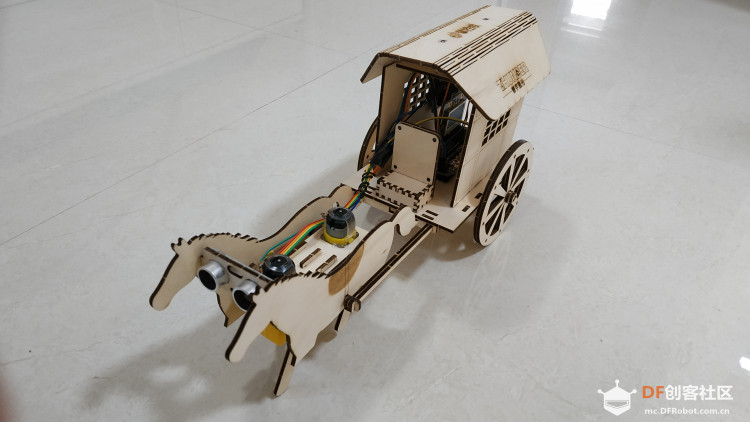 反复测试各个功能是否正常实现、马走路姿态是否正常。电机接线方式可能会导致两个马达运转方向不一致,可以在程序中调整。走路一高一低或者很别扭,一般都是前后马脚没有调到相反的位置。   |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶










