|
5135| 10
|
【HUSKYLENS Inside】AI猜拳机器人 |

本帖最后由 怀若谷 于 2020-9-5 21:07 编辑  猜拳机器人是创客制作中比较经典的项目,也是一个非常有趣的项目。我之前也做过很多个版本。当手上有了一个二哈AI视觉模块,并拥有了激光切割机后,我萌发了制作一个真正有5个手指的猜拳机器人。 我给机器人设计了两种模式,一种是“随机模式”,一种是“智能模式”。“随机模式”下,AI视觉模块不会被使用,机器人发出“石头、剪刀、布”的口令后会随机出一个手势。游戏者,就像面对一个真正的人类一样,结果完全随机。“智能模式”下,AI视觉模块会启动,当侦测到有人出拳时,会迅速进行判断并控制手指做出必赢的手势(如:人出石头,机器则出布),游戏者没有赢的可能。 演示视频 #创作过程# (一)硬件搭建 材料清单 micro:bit 1块 电机驱动扩展板 1块 二哈AI视觉模块 1个 自锁按钮开关 1个 180°舵机 5个 串口MP3模块 1个 小喇叭 1个 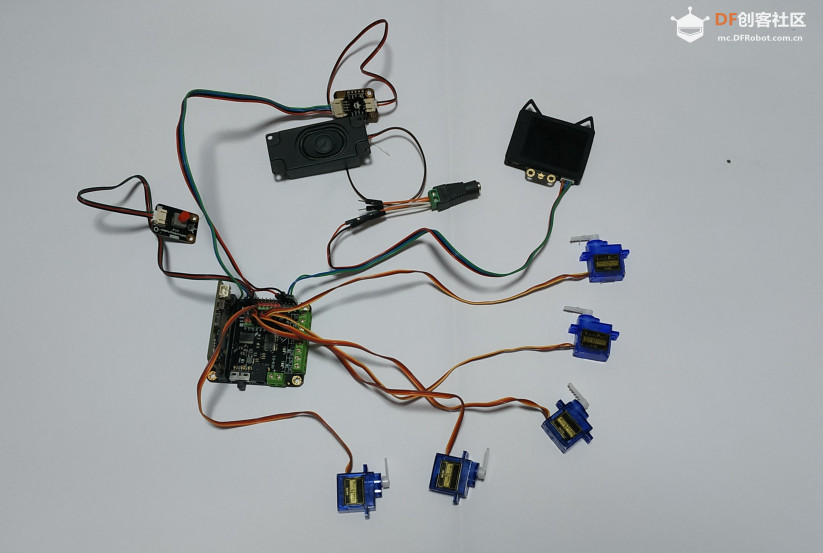 串口MP3模块——P0、P1 二哈AI视觉模块——P20、P19 (先使用物体分类模式对三种手势进行学习) 自锁按钮开关——P2 舵机分别接S4、S5、S6、S7、S8 (二)编写程序 编程软件:Mind+ 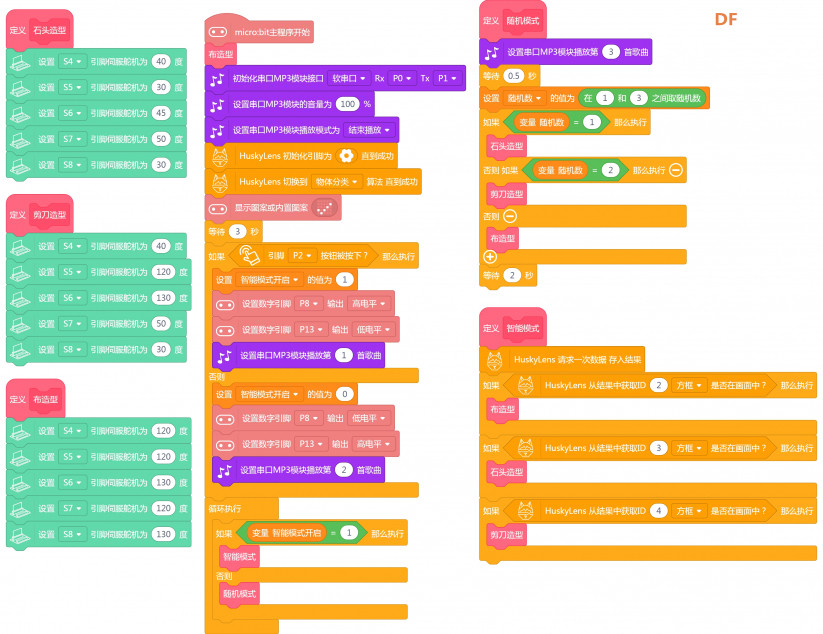 (三) 激光建模 建模软件:LaserMaker 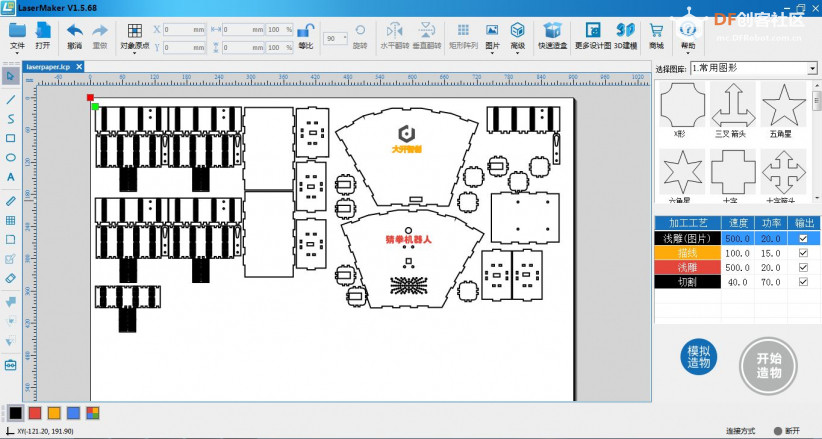 (四) 木板切割 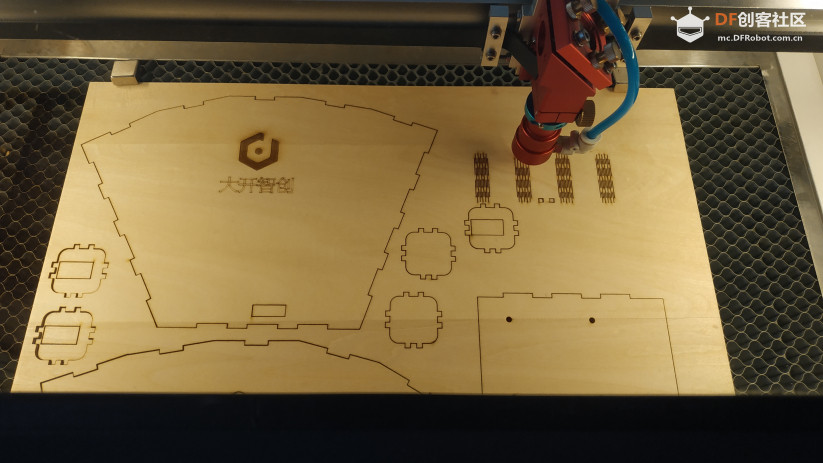 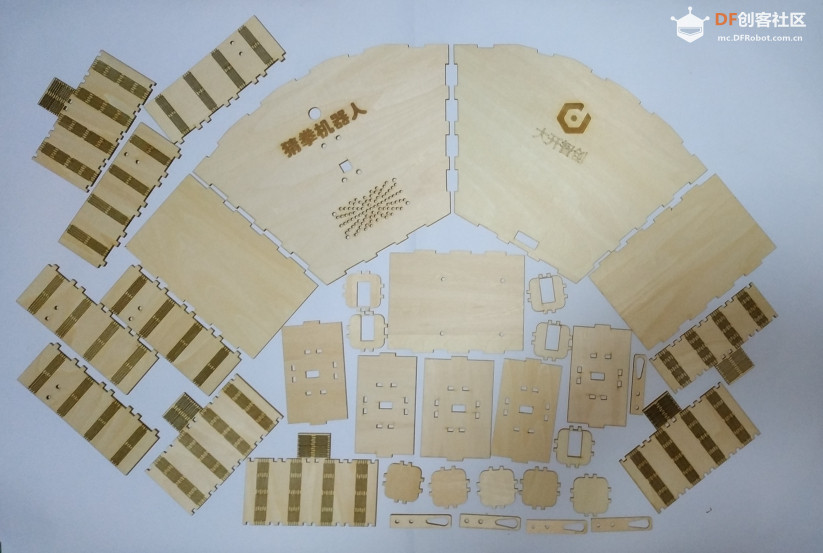 (五)组装调试  【1】组装盒体  【2】安装硬件材料(拆下舵机) 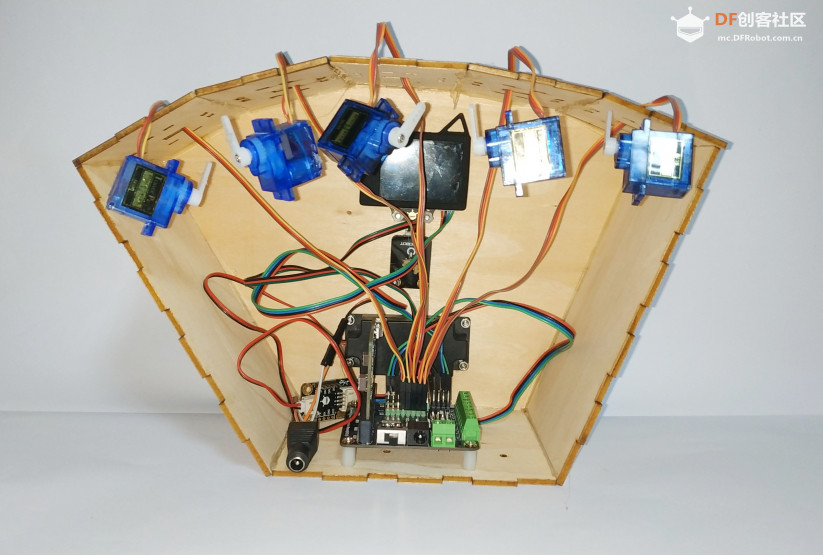 【3】接上舵机 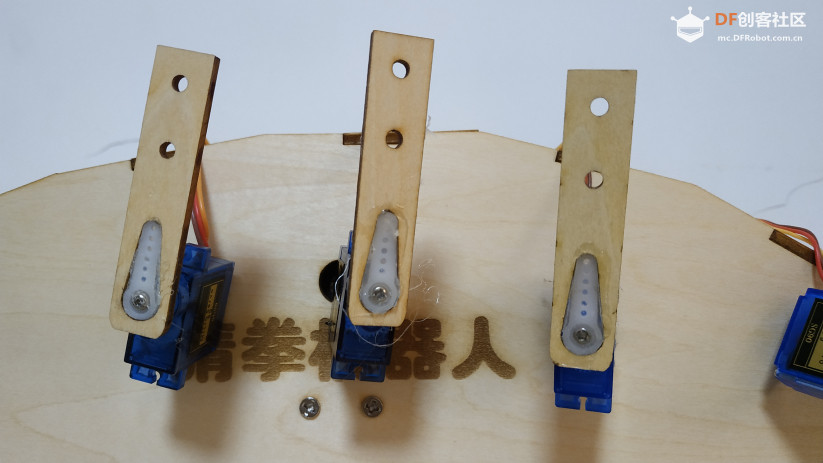 【4】装上连接件  【5】将舵机固定到“手指”根部件  【6】安装“手指”根部件  【7】组装好“手指”顶部件 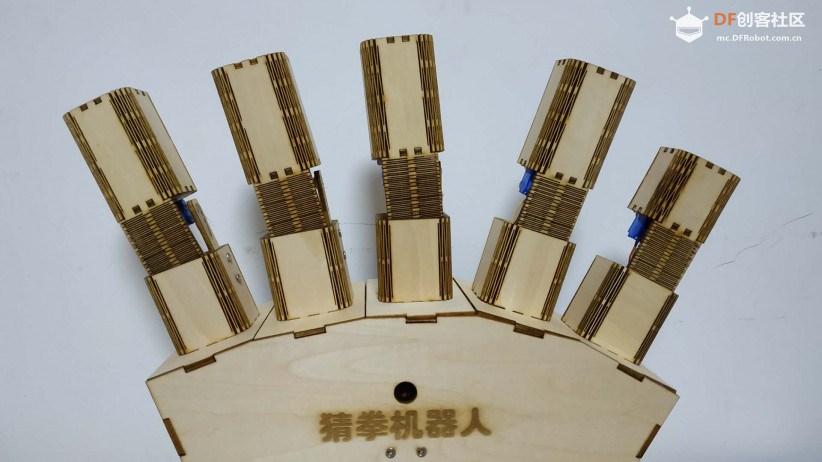 【8】将“手指”顶部件固定在舵机上 |

167.87 KB, 下载次数: 9034
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶









