|
6385| 0
|
[参赛项目] 「创客造」基于乐高EV3玩转麦克纳姆轮 |
|
本帖最后由 490054348 于 2021-2-18 21:26 编辑 基于乐高EV3玩转麦克纳姆轮01 麦克纳姆轮简单介绍和原理 众所周知,麦克纳姆轮可以实现全向移动!麦克纳姆轮由两大部分组成:轮毂和辊子(roller)。轮毂是整个轮子的主体支架,辊子则是安装在轮毂上的鼓状物。麦克纳姆轮的轮毂轴与辊子转轴呈 45° 角,这是最常用的。麦克纳姆轮一般是四个一组使用,两个左旋轮,两个右旋轮。左旋轮和右旋轮呈手性对称,如下图:  麦克纳姆轮安装方式有多种,主要分为:X-正方形(X-square)、X-长方形(X-rectangle)、O-正方形(O-square)、O-长方形(O-rectangle)。其中 X 和 O 表示的是与四个轮子地面接触的辊子所形成的图形;正方形与长方形指的是四个轮子与地面接触点所围成的形状。本文所采用的的安装方式是 O-长方形,如下图。 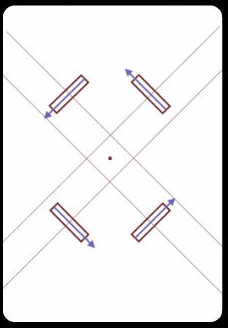 下面是实际的安装效果图纸: 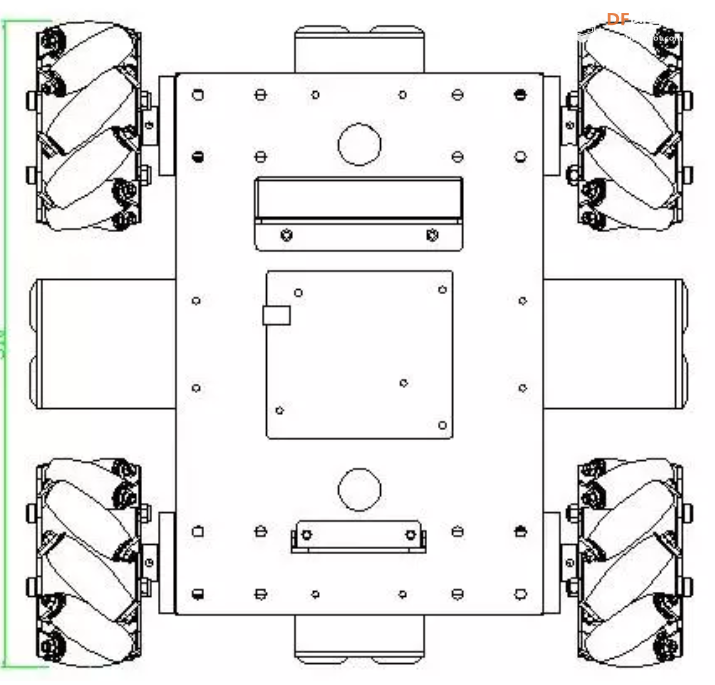 然后分别独立控制这个四个麦克纳姆轮转动方向就可以实现各种运动,比如前进,后退,左移,右移,旋转等。如下图: 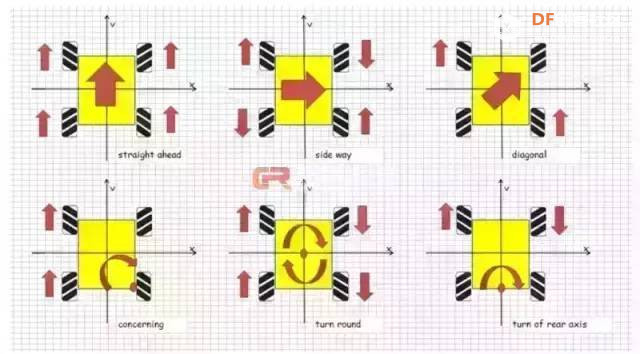 既然麦克纳姆轮车需要四个轮子,那么就需要四个电机控制,理论上乐高的四个电机端口正好够用的,但是这样太浪费资源了,不能做其他事情了,不划算。那么我们能不能多扩展几路电机控制呢? 答案是当然可以,那我就自己做个扩展电机模块吧!结合之前做乐高EV3其它传感器的经验,就寻找电机控制器吧,找来找去选择了HR8833这个双通道H桥电流控制电机驱动器,它可以驱动两路直流电机或者一个步进电机。我们需要四路电机,那么需要两个就可以了。PCB板子空间正好够用!下面是电机驱动芯片资料: 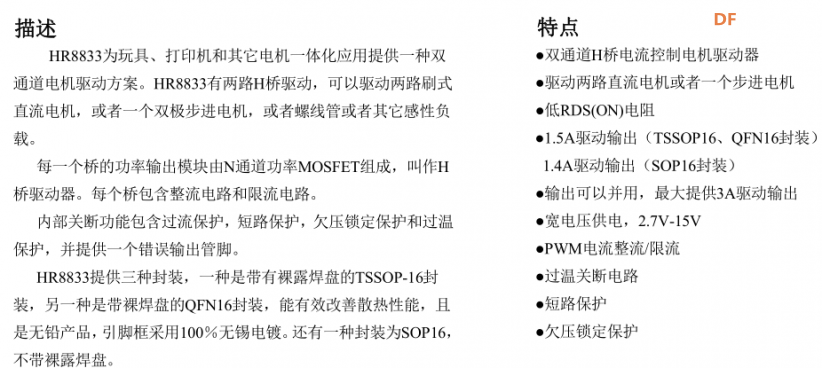 于是设计电子原理图,绘制PCB板,制版,买材料,焊接,测试一系列操作得到如下产品: 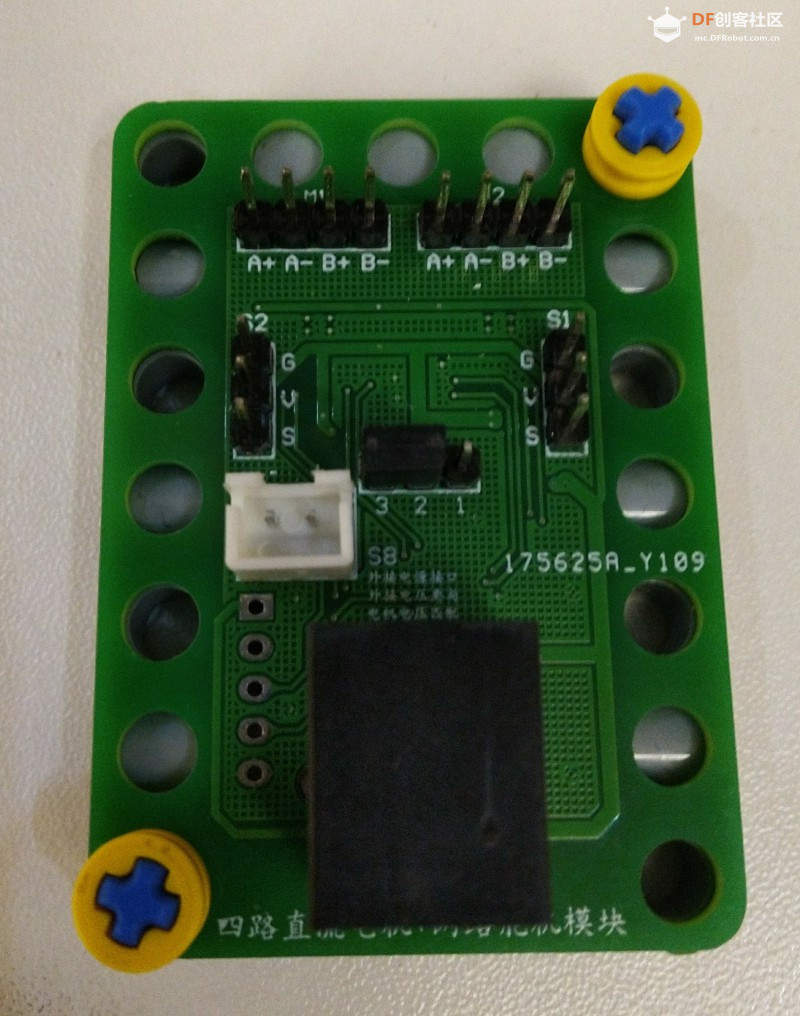 既然硬件设计OK了,那就的用EV3编程软件给驱动起来呀。于是花了半天时间写好了扩展模块的底层驱动和EV3官方软件的图型化编程模块。如下图:  软件功能上实现了单个马达的正反转,两路马达正反转,四路马达正反转及麦克纳姆轮的11种运动等功能。主要看下麦克纳姆轮的编程模块如下: 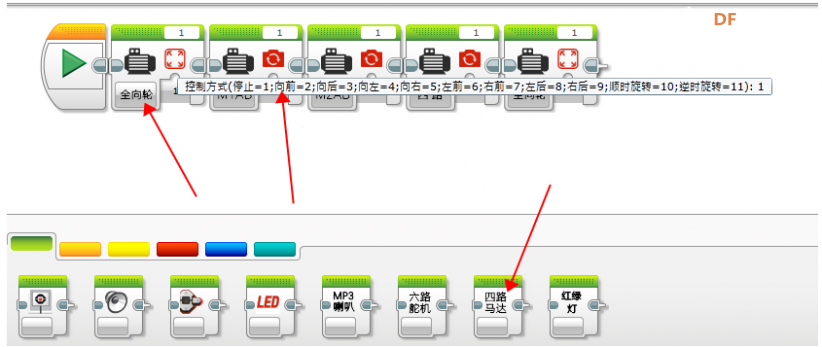 编程的时候只要选择对应的运动模式就可以了。非常简单。 02-3 小车搭建 由于是使用积木,所以网上买了积木版本的麦克纳姆轮和四个马达电机。 (这里说下,我设计的马达驱动电压是外接的,由于EV3的传感器接口驱动电流小,驱动不了四个马达。所以外接的马达一定要匹配对应的外接电压才可了,理论上HR8833的宽电压供电是2.7V-15V,所以这个板子驱动那些非积木类电机也是OK的) 搭建拆分图如下: 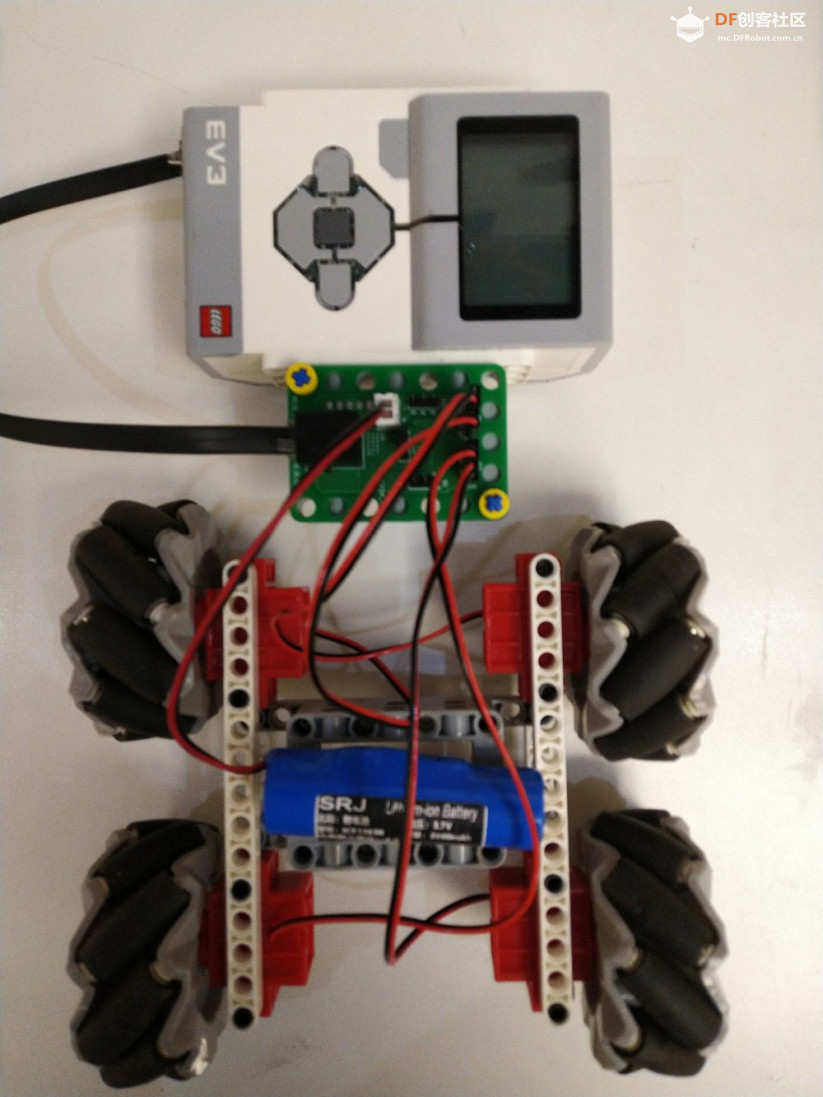 万事俱备,只差编程控制了。于是和自己之前做的遥控手柄一起结合来个实际控制吧!编程很简单,就是一个多分支语句哪个键按下朝哪个方向运动,如下图:  具体视频演示可以看下我的抖音里的视频演示,抖音号:174945313 04 扩展玩耍 有了这个外接的电机扩展模块,这样我们就能在EV3的基础上玩出来很多好玩的,比如结合二哈识图做全向人工智能移动小车,做一些任务移动控制更简单了。 扩展板子还预留了两路舵机接口也很好的扩展的! |
 创客造
创客造



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






