|
9259| 7
|
[项目分享] 乐高EV3人工智能摄像头应用之物体追踪 |
|
这是利用人工智能摄像头做的第04个小作品:物体追踪 用到的器材: 1:二哈识图(HUSKYLENS)(固件版本0.4.6,模式选择物体追踪) 2:乐高EV3主机及其配件 3:自制二哈转EV3通信板 4:实现原理a首先利用二哈的物体追踪学习要追踪的物体(参见二哈识图说明的7.2 物体追踪章节)b:然后就可以读取出追踪物体的ID和他的坐标值 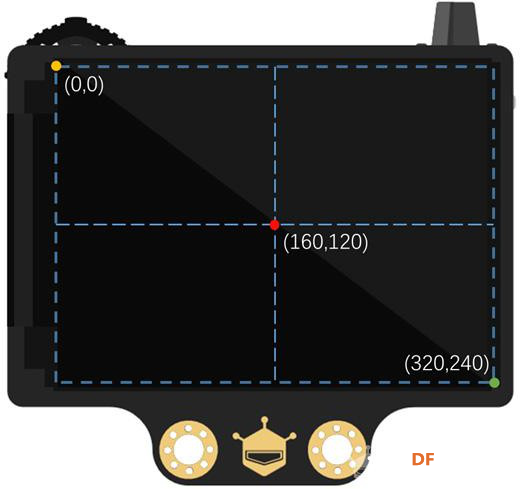 当X轴值小于120时,小车左移;当X轴大于180时,小车右移; 当Y轴值小于80时,小车前进;当Y轴大于120时,小车后退; 当120<X<180且80<Y<120时,小车禁止; 具体XY值根据实际情况调整,不同搭建不同环境要求是不同的,我这个只是一个参考! 5:EV3编程图片: 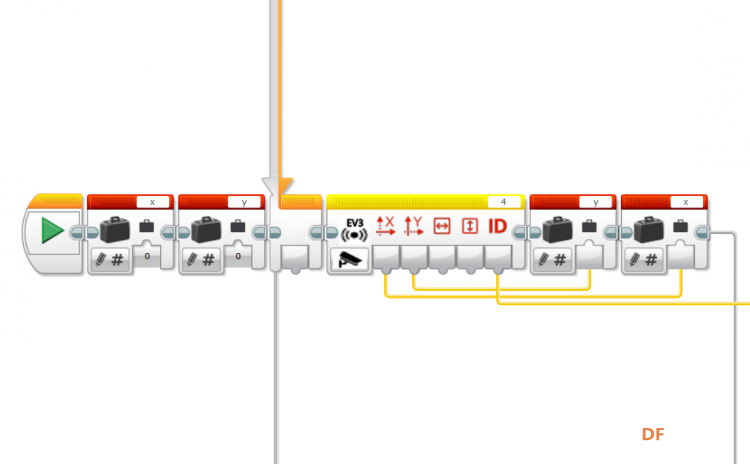 数据处理伪代码: [mw_shl_code=c,false]while(1) { 读取ID,XY值; 如果ID=1; 如果x<120: 左移; 如果x>180: 右移; 如果y<80: 前进; 如果y>120: 后退; 如果120<X<180且80<Y<120 禁止; 否则 停止 }[/mw_shl_code] 6:搭建实物图 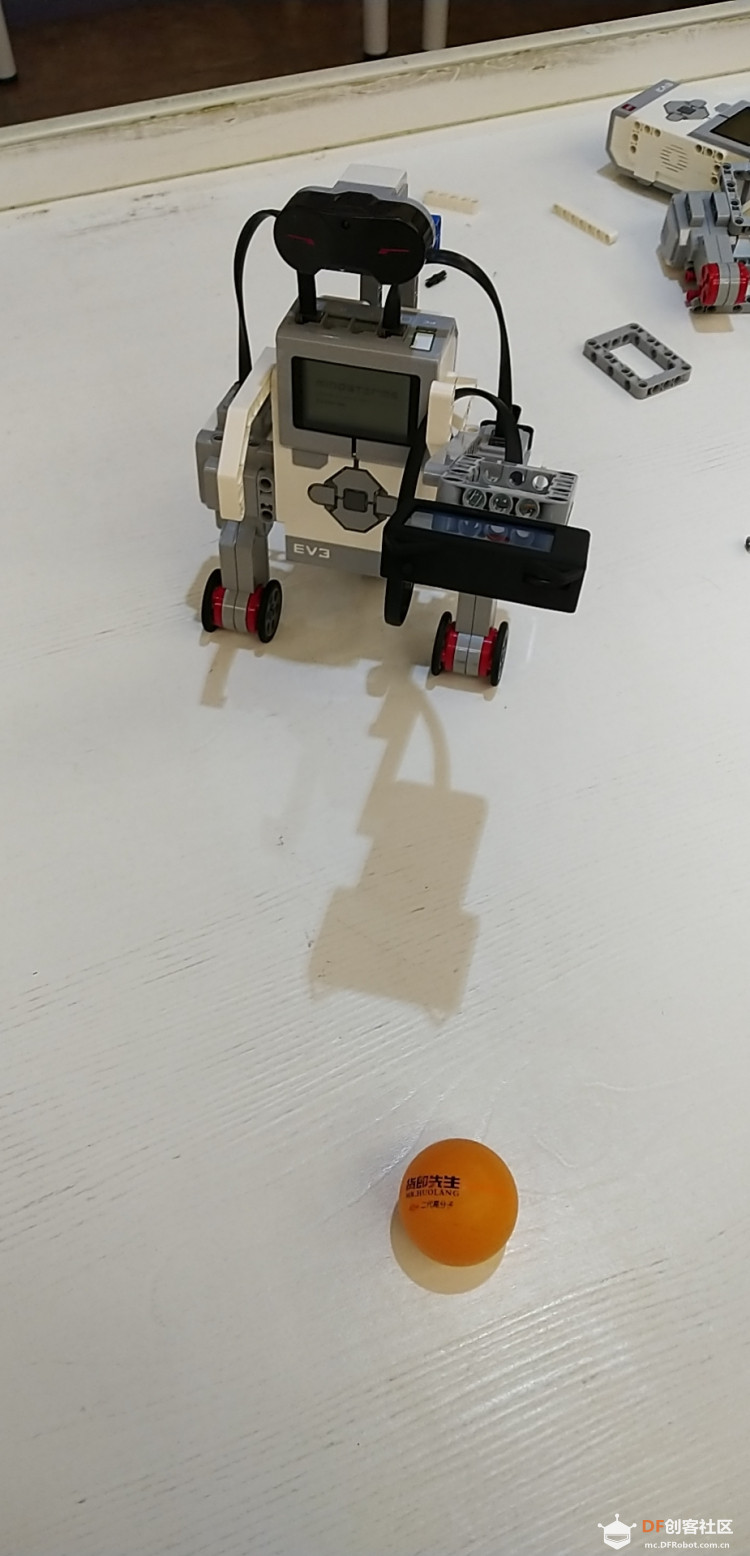 7:演示视频 简单演示放在抖音里,有兴趣的可以去看下。抖音号:174945313 |
 创客造
创客造



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







