|
9965| 0
|
[进阶] 和12岁小同志搞创客开发:两个控制器之间如何实现通信? |
|
本帖最后由 不脱发的程序猿 于 2021-6-23 12:48 编辑 机缘巧合在网上认识一位12岁小同志,从零开始系统辅导其创客开发思维和技巧。  项目专栏:https://blog.csdn.net/m0_38106923/category_11097422.html 本篇博客来讲讲如何实现两个控制器之间数据通信(考虑到创客基础问题,本文不讲解苦涩的通信理论技术),主要包括:有线通信和无线通信两种方法,具体区别如下图所示: 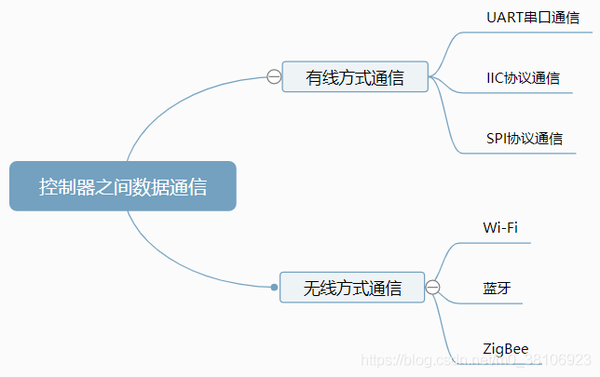 1、有线通信 控制器之间有线通信主要包括:UART接口、IIC接口和SPI接口通信,两者实现通信可理解是控制器驱动传感器的原理,只需要将总线对应连接,编写驱动程序,即可实现数据的收发控制。 控制器之间UART接口连线效果如下所示: 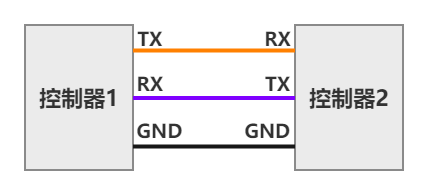 控制器之间IIC接口连线效果如下所示: 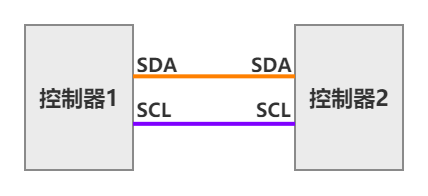 控制器之间SPI接口连线效果如下所示: 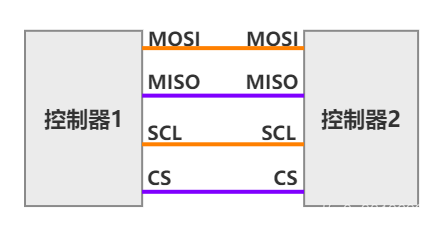 由于通常UART串口通信方式较为简单,是使用最多的通信方式。 另外使用以上通信接口配合通信模块,也可基于RS485、RS232、RS422、CAN、以太网等通信总线直接实现两个控制器之间数据通信。 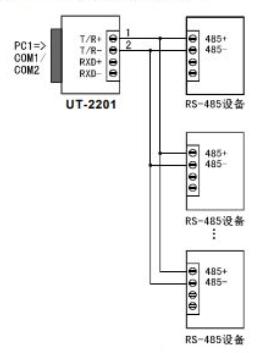 2、无线通信 无线通信主要依托于无线通信模块实现,例如局域网内常使用的蓝牙、Wi-Fi、ZIgBee等通信技术。 开发者只需要使用两块控制器驱动无线模块,即可实现无线数据收发,大多情况下无线通信模组都是基于UART串口通信进行驱动。 蓝牙通信模块如下所示:  ZigBee通信模块如下所示:  WiFi通信模块如下所示:  3、串口点灯 通过一个案例,了解控制器之间使用UART接口实现数据通信。 由于我只有一块Arduino开发板,所以使用USB转TTL调试助手模拟控制器进行有线通信,效果如下所示: 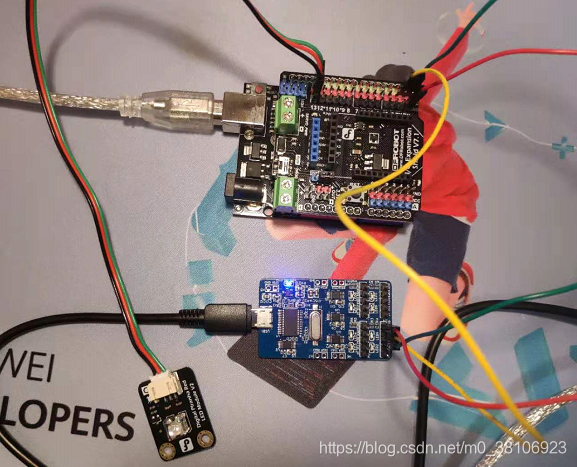 通过串口软件发送数值1开启控制器LED,发送数值0关闭控制器LED,程序设计如下所示: 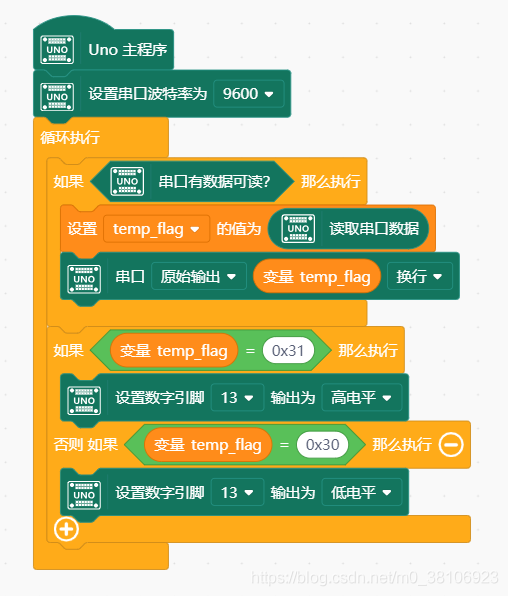 需要注意,Arduino的编程中,串口输入与输出都是针对ASCII码值的,例如数值1,ASCII码值为十六进制0X31,数值0,ASCII码值为十六进制0X30。 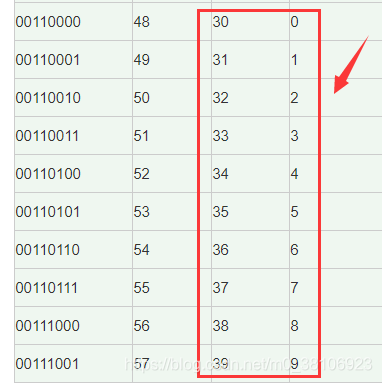 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖






