|
12297| 6
|
[项目] Metaverse! 触摸虚无,重建现实 |

|
本帖最后由 macCosmo 于 2021-12-8 10:56 编辑 Touching the Void (虚无触摸) 是我在Parsons Design+Technology专业的研究生毕业项目,创作于2017年,之后也陆续有更专业的触觉手套诞生。正好赶上元宇宙热潮,发出来炒一波冷饭~  作品定位为一件交互装置艺术作品,更注重于自我表达(不实用不商业不用户友好!)。它的概念是在空间中存在一个虚拟的,看不见的物体。通过穿戴创作者设计的触觉手套,当观众手指的位置与虚拟物品的边界重合,手套将提供震动和闪烁的反馈,从而引导观众感受物体的体积和形态。 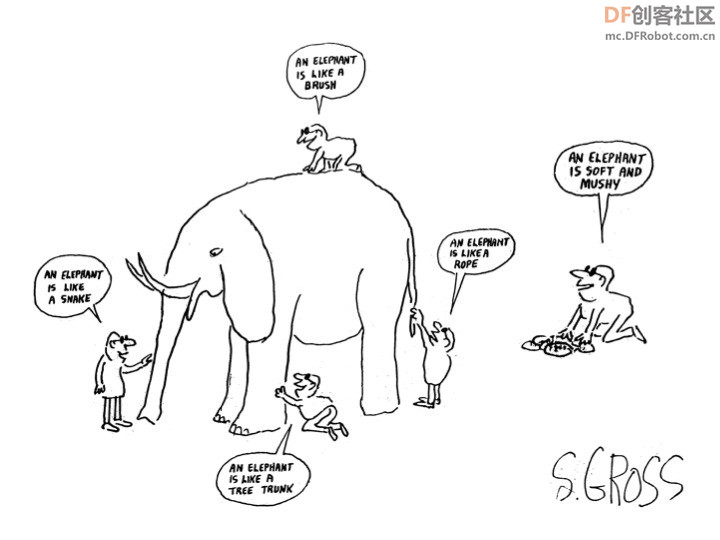 作品以盲人摸象的寓言为灵感,故事讲述了六个盲人通过触摸去认知大象的样子,因为接收信息的偏差,有的人认为大象像柱子,草绳或一堵墙。我们通过看到的,听到的和触摸到的信息去认识世界,而这个世界正是我们感知到的样子。正如贝克莱所说,“存在就是被感知。”那么人们有没有可能仅通过触觉,在脑海里生成这个虚拟物体的影像,而这个物体也通过非实体的方式存在在这个空间里?这成为了引导我创作的问题。   装置通过Leapmotion传感器,Openframeworks和Arduino微控制器实现。Leapmotion实时监测每个手指的位置,手指位置的数据在OF里与三维模型的所有端点做对比,如果手指位置与端点位置重合,则说明观众触摸到了物品的边界,Arduino将控制对应手指下方的马达震动,从而提供触觉反馈。 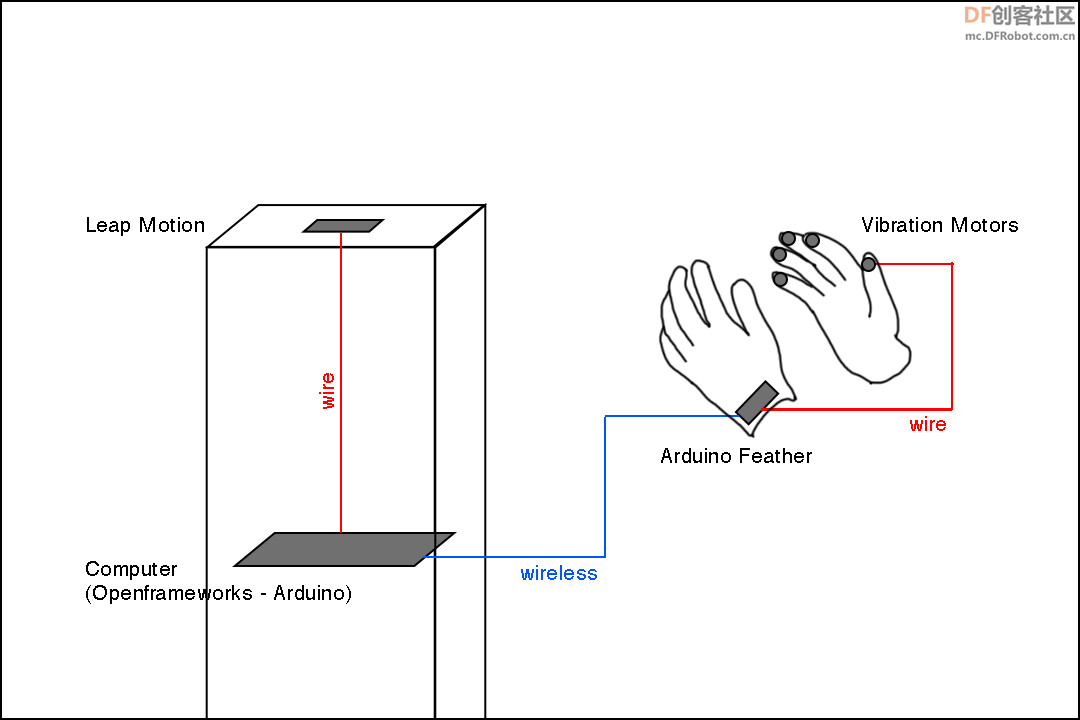 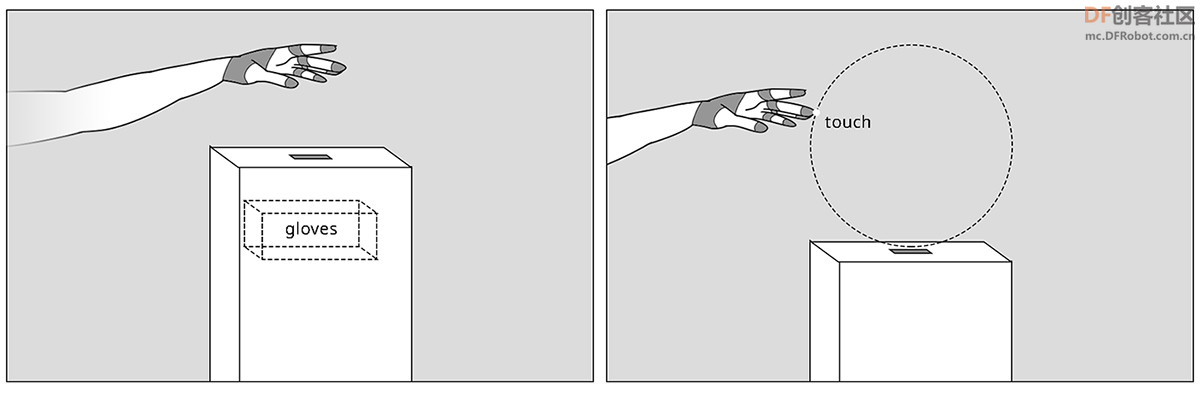 作品经过几次技术上的迭代,在设计最初我希望作品的互动空间可以足够的大,就像在房间里触摸一只虚拟的大象。但是发现大范围的深度检测当时的技术只能通过kinect,而kinect对手的位置的捕捉只能到手掌而不能提供每个指尖的位置。为了提供更好的触觉反馈,我将手势捕捉工具从kinect改变成了leapmotion(这个公司貌似最近破产了,也是时代的眼泪了)。 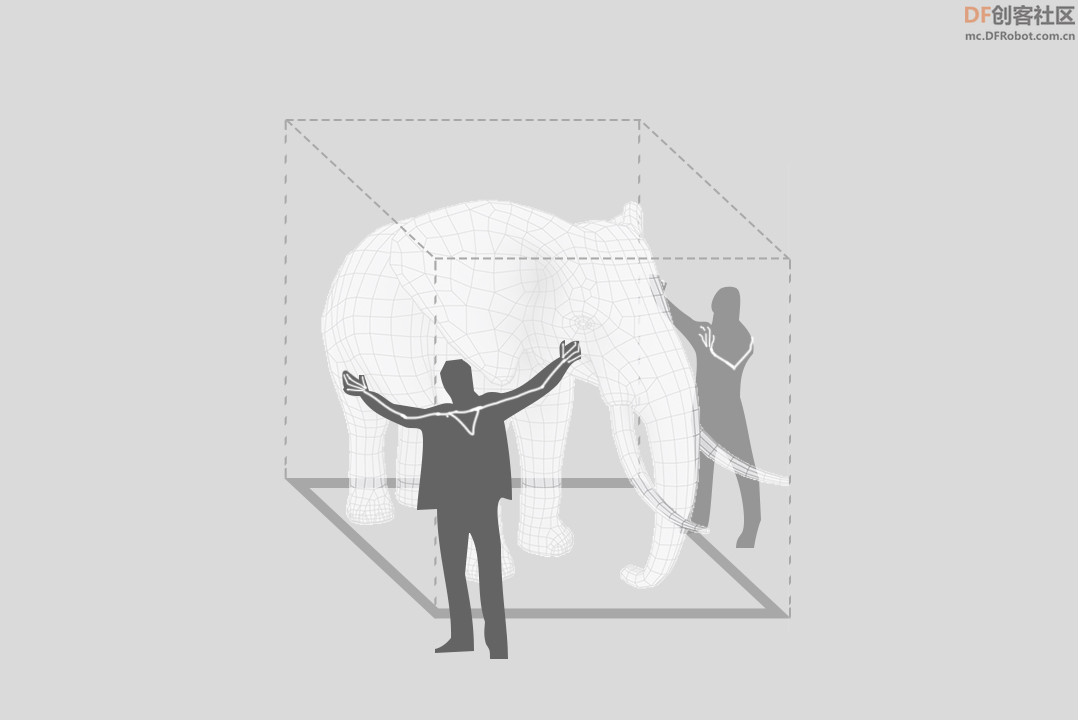 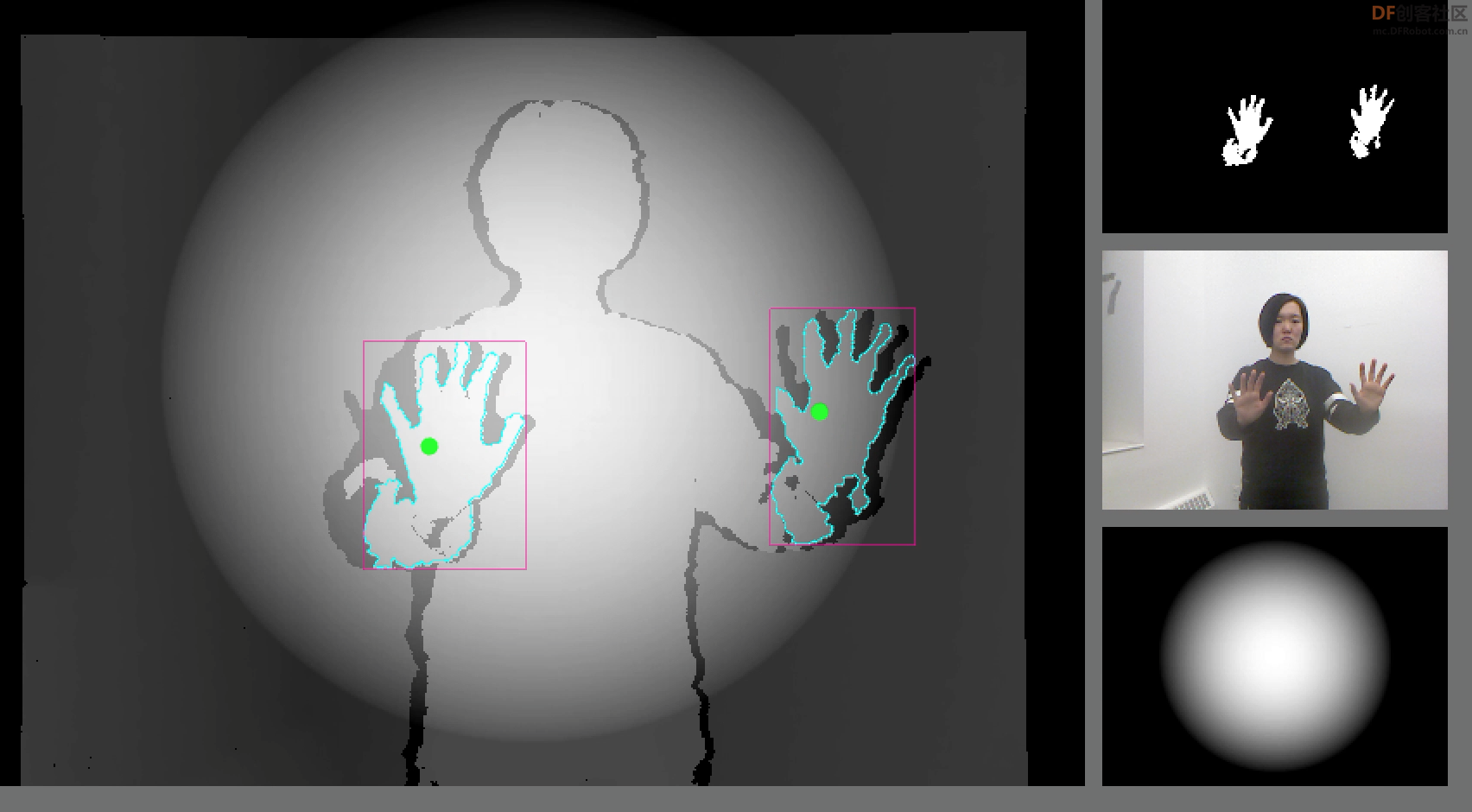 手套的设计也从最初把电线裸露在外,进化成了使用导电的缝纫线手工缝制在泡沫板制作的手套结构上。还在指尖增加了可穿戴led提供视觉的反馈。   最后上一波价值。用海森伯的话说,“我们观察到的并不是自然本身,而是由我们探讨问题的方法所揭示的自然。” 因为人类感知的局限性,我们所认知的世界一定是片面和不完整的。在与虚拟物体互动的体验中,该物体在被观众所触摸的瞬间形成在观众的意识里。而展示物品的空间,也成为了虚拟和现实叠加的多维空间。  (^这是我的Thesis导师 Jesse Harding) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶











