|
39472| 5
|
[教程] 跟着思兼学习Klipper(11)3D 打印机主板拓展更多轴和可控风扇 |

前言原创文章,转载引用务必注明链接,水平有限,如有疏漏,欢迎指正交流。 【 如需查看文章更新请访问本文链接 -> DFRobot社区 】 Fly3D Gemini 主板越用越顺手,新版本可能会采用 SDIO 板载 WiFi 模块,减去那个突兀的 USB 无线网卡,美滋滋。现在的问题就是默认只支持 4 个步进电机驱动,2路可控风扇,而实际上除了小体积的 Voron V0 等机型,多数玩家的机器都是双 Z 轴以上,至少 3 个可控风扇(模型、喉管、主板+驱动)来降低噪音,初始配置远不够用,继而导致 Gemini 的普及受到限制。虽然官方会出新的拓展板,但是貌似是采用一块额外的 MCU 小主板、或者 CAN 通讯的挤出头板来缓解这一问题,那我们有没有办法提前低成本解决这一问题呢?答案是肯定的,就是我在互联网冲浪的时候,发现了 MKS 的两款产品:
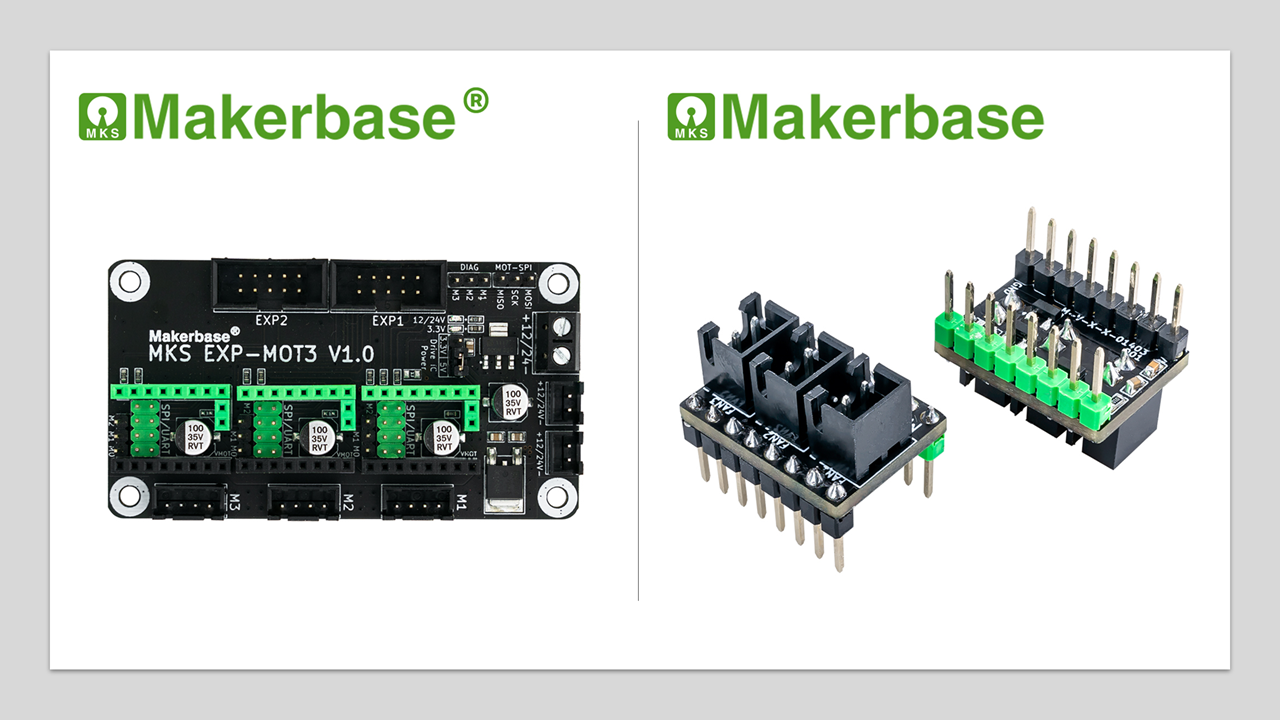
【图1】MKS EXP-MOT3 主板驱动拓展模块 和 插拔式3路风扇扩展模块 本文介绍如何在 Gemini 以及其他兼容 Ramps EXP1、EXP2 拓展插槽的 3D 打印主板上使用多种模块,拓展驱动以及利用富余的插槽。 1、使用 EXP-MOT3 驱动拓展模块我们知道,MKS 和 Fly3D 多数主板都有 EXP1、EXP2 插槽,兼容最早的 Arduino ramps 3D打印机盾板的引脚定义,此引脚常用于连接 12864 或者 2004 LCD屏幕。
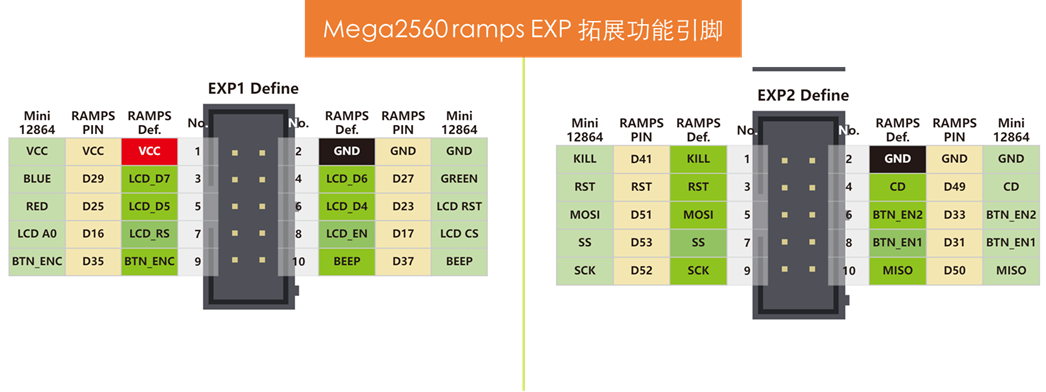
【图 2】ramps 引脚定义,注意有 5v (AVR) 和 3.3v (32bit boards) 区别,以及 KILL 信号引脚空置和连接 5V (MKS) 的区别。所以各位购买拓展模块时,建议购买同一厂家。
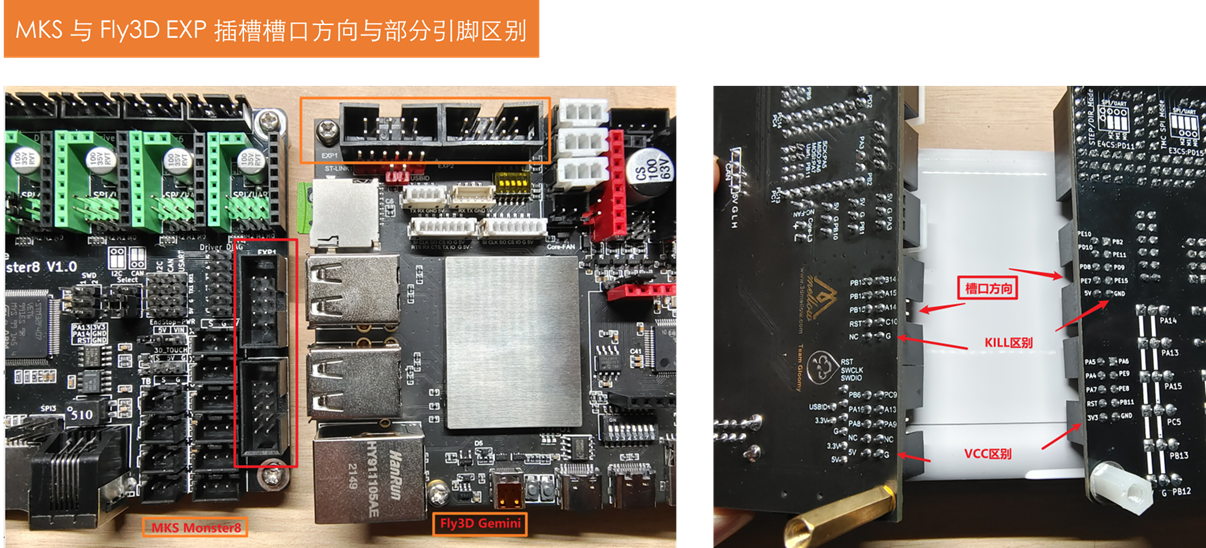
1.1 EXP 槽口方向区别与排线购买由于 MKS 历史遗留问题,其主板该拓展插槽槽口方向和 Fly3D 相反,导致两者的模块都无法直接使用。
那么如果想要使用该拓展模块,临时使用可以把 FC 灰排线一头凸点切掉,正常需要购买对应排线。我们用表笔测得 MKS 为 10P 同向凸点相反的排线,由于 Fly3D 和 MKS 顺序相同槽口相反,所以我们需要购买的排线规格为 【同向凸点相同(朝内或朝外)】或者 【反向凸点相反】,第二种更灵活。同时由于 SPI 信号为独立的,可以尝试购买 30cm 长的,方便连接屏幕。
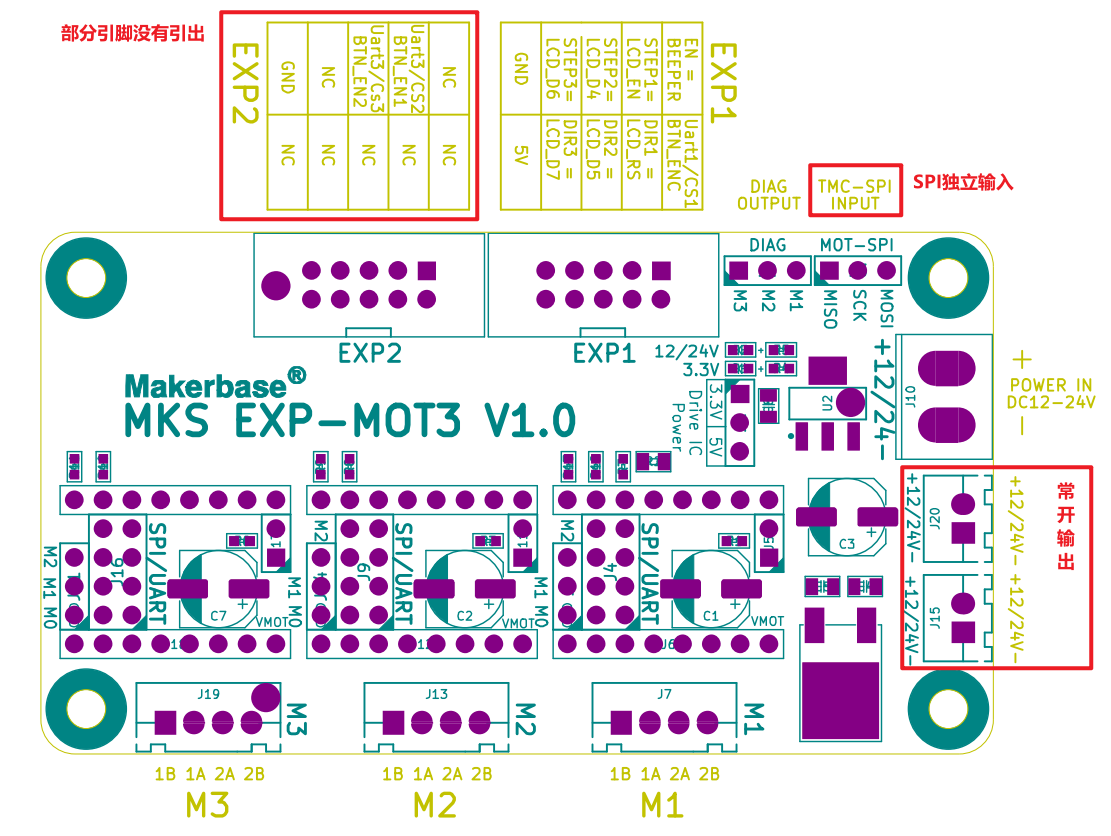
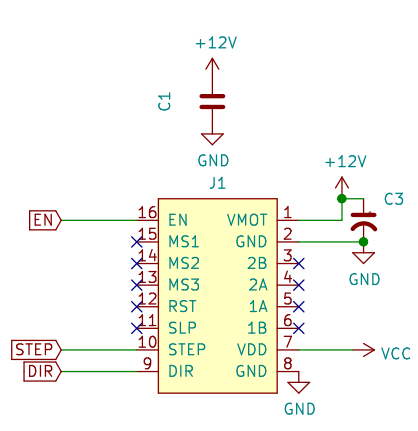
1.2 EXP-MOT3 模块接线该拓展模块原理图及引脚图可以在 MKS Github 项目页面 找到。
我们发现如下几个细节:
1.3 EXP-MOT3 配置文件基于我的 Klipper-Box 项目配置文件格式,直接添加到主板配置文件中的引脚部分。 这里使用 Fysetc TMC2209 v2 步进电机驱动,测试效果如下:
2、插拔式3路风扇扩展模块一下子多了 3 个可控 MOS 输出,上位机、仓室风扇有着落了,美滋滋,一般低于 1A 以下的负载问题都不大(本人不对此负责)。
可见 3 个控制脚分别是 EN/STEP/DIR,采用的 MOSFET 型号为 3、其他模块
总结此外置驱动模块可以方便地拓展 Gemini 主板的驱动插槽,但是用在 Gemini 上可以做一些优化(例如 SPI 信号),希望 Fly3D 公司可以出配套的产品。 由于此模块占用 exp1 和 exp2 引脚,导致无法使用原来的 12864 等 lcd 屏,但是其实彩色触摸屏价格合适且更好用,所以无关紧要了。 |
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








