|
49500| 14
|
[项目] 「仿生四足系列」第一篇 建模 |
早上起来捡到一个快递员,上来一把抢走他的快递,然后回家把快递修理一顿……原来是一本 杂志 。接着我就看到了里面有关波士顿动力的文章。然后我就觉得这很有意思,决定买一个,但是我妈说太贵,不想买。校长说这只是积木而已,给了材料自己搭建就行了。没办法,哼,你不买,我自己做一个!来,上才艺!
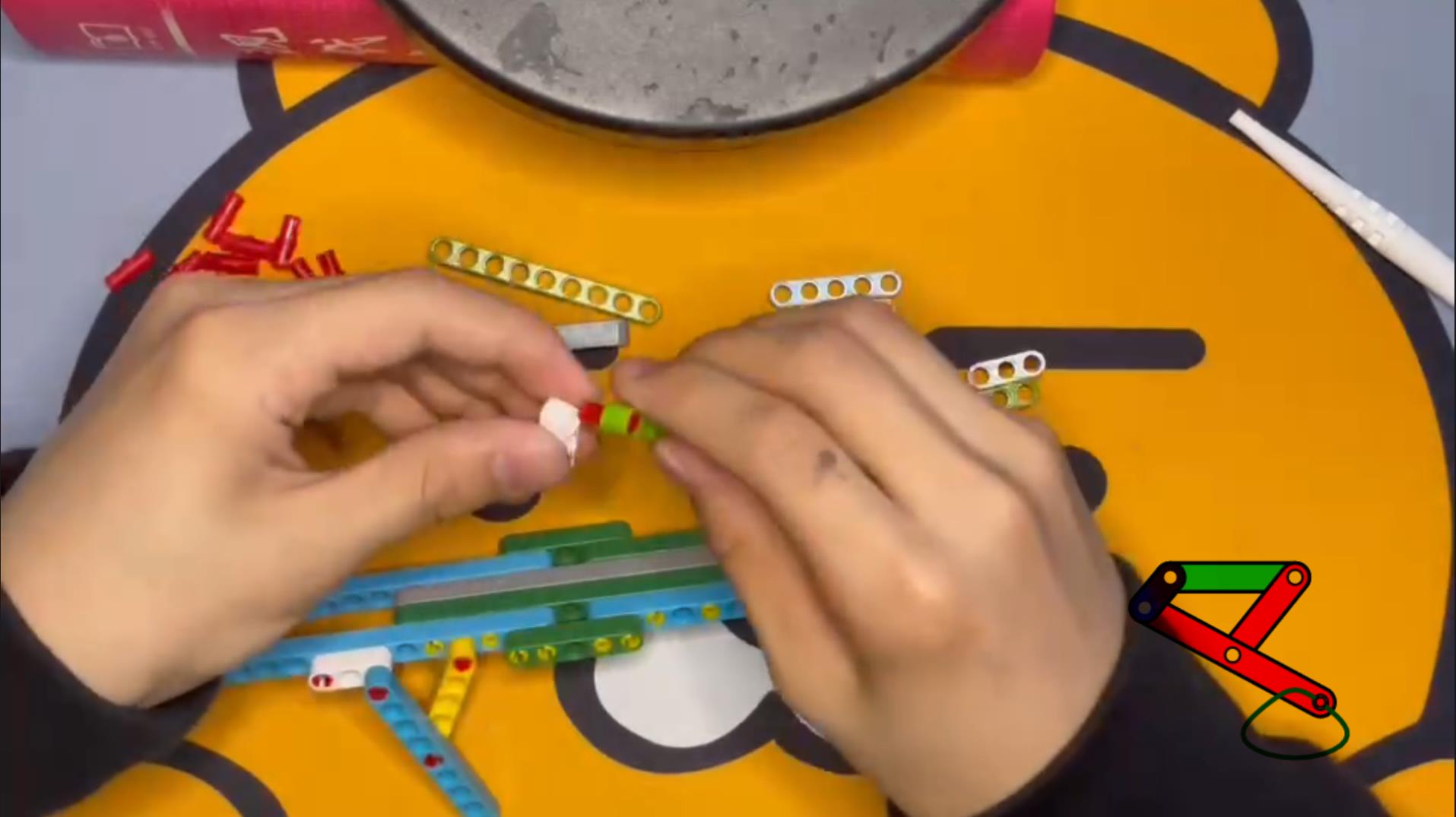
视频链接如下一、构思空想肯定是想不出来的,就先画了个草图,但是我想将它呈现得更动态一点,所以就用JIMU搭建了一个机器狗,但是功能并不理想。于是,我开始在DF创客社区上查(抄)找(袭)相关资料,直到看到了驴友花雕的帖子连杆形式的腿机构十一种:盘点机器人行走背后的机械原理 二、建模我使用的是这种切比雪夫连杆机构,它常用于制作机器人。
根据公式i=3n-2m(n为活动构件数目,m为低副数目)可得自由度i=1
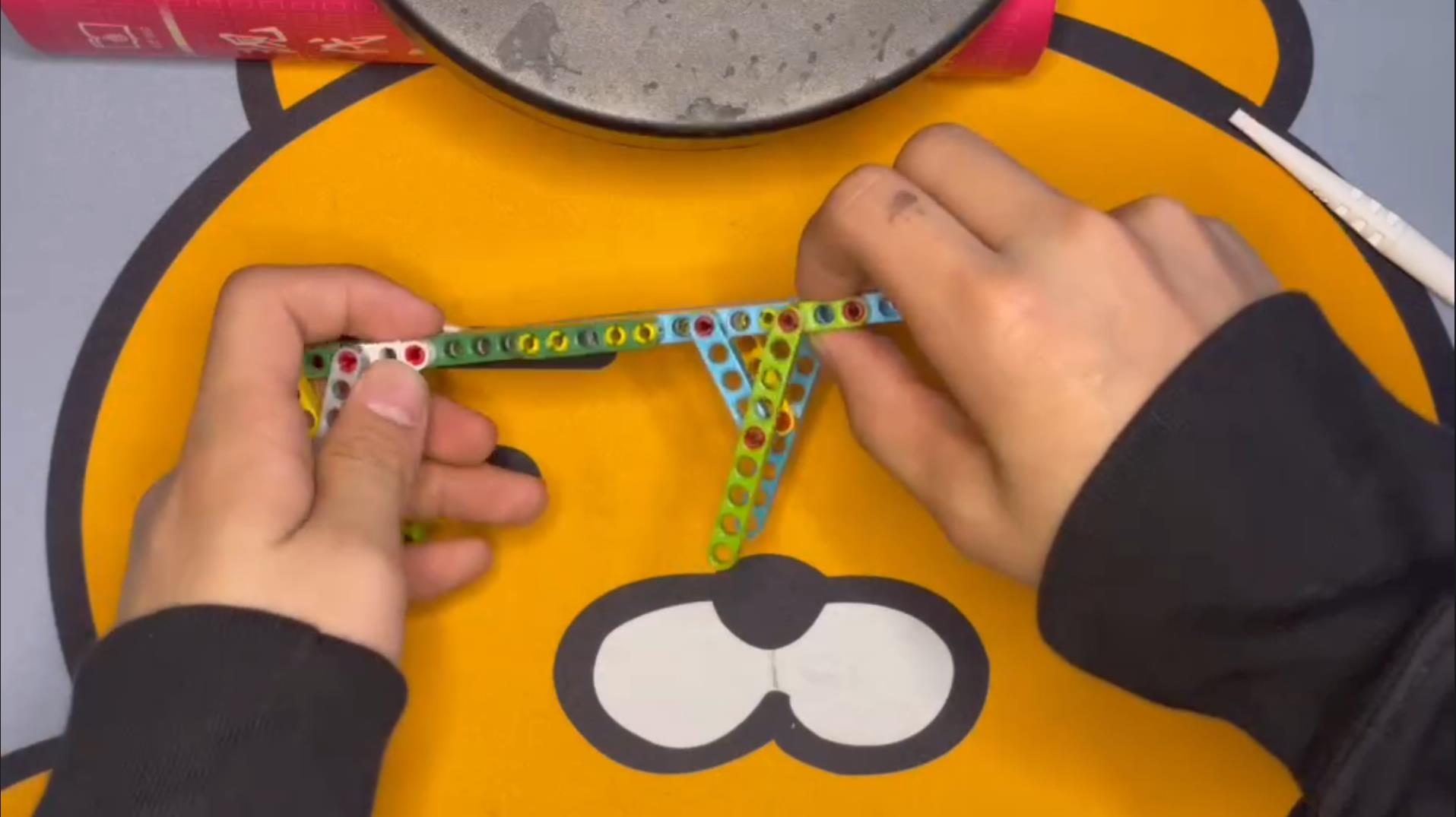
首先先拼好一条腿
然后可以根据这一条腿拼出剩下三条腿。
三、完成
但是,想要实现它,还差个十万八千里。
不过没关系,既来之,则做之,我将会继续更新!
走之前再留个联系方式
|
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed







 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








