|
21590| 0
|
[项目] LabVIEW控制Arduino实现超声波测距(进阶篇—5) |

|
本帖最后由 不脱发的程序猿 于 2022-6-12 14:19 编辑 1、项目概述 超声波测距是一种传统而实用的非接触测量方法,与激光、涡流和无线电测距方法相比,具有不受外界光及电磁场等因素影响的优点,在比较恶劣的环境中也具有一定的适应能力,且结构简单、成本低,因此在工业控制、建筑测量、机器人定位方面有广泛的应用。 本节将介绍使用HC-SR04超声波传感器、DS18B20数字温度传感器、ArduinoUno和LabVIEW组成带有温度补偿的超声波测距系统,可用于机器人避障等场合的距离测量。 超声波测距的原理:从超声波发射器发出的超声波(假设传播介质为气体),经气体介质的传播,遇到障碍物之后反射的超声波被超声波接收器所接收。将超声波发射与接收之间的时间与气体介质中的声速相乘,就是声波传输的距离,声波传输距离的一半便是所测距离。 拓展学习:LabVIEW控制Arduino采集多路DS18B20温度数值(进阶篇—3) 2、项目架构 超声波测距系统总体框图如下图所示: 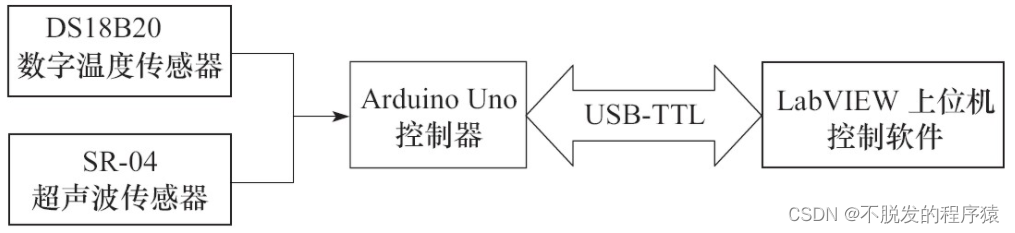 项目详情请参见:LabVIEW控制Arduino实现超声波测距-单片机文档类资源 3、硬件环境 本项目将HC-SR04超声波模块的VCC、GND、Trig、Echo分别连接到ACCrduinoUno控制板的+5V、GND、数字端口D2和D3上。然后,将DS18B20温度传感器VCC、GND、DQ分别连接至Arduino Uno控制板的3.3V、GND和数字端口D4上,且在DQ与3.3V之间连接一个1KΩ的上拉电阻。超声波测距系统硬件连接示意图如下图所示:  在基于Arduino与LabVIEW的上下位机超声波测距系统中,Arduino Uno控制板需要完成以下功能:接收和判断命令、采集和传输温度与超声波往返时间。Arduino Uno控制板通过串口接收上位机发来的命令,分析得到有效命令,读取DS18B20数字温度传感器,将气温数据上传给LabVIEW软件或控制超声波传感器发射超声波,并测量出超声波往返的时间,将超声波往返的时间上传至LabVIEW软件。 Arduino Uno控制器负责读取LabVIEW上位机发来的距离测量和温度采集命令,并通过HC-SR04超声波传感器和DS18B20传感器获取超声波往返时间和温度数据,通过串口发送回上位机LabVIEW软件。Arduino Uno控制器的程序代码如下所示: LabVIEW上位机部分需要完成以下功能: 1、向下位机Arduino控制器发送采集温度的命令,Arduino控制器通过串口接收上位机命令,完成温度的采集之后并将数据回传,LabVIEW软件将回传的温度数据显示在前面板上。 2、向下位机Arduino控制器发送测量距离的命令,Arduino控制器通过串口接收上位机命令,完成距离的测量之后并将超声波往返时回传,LabVIEW软件将回传的超声波往返时间、温度与音速公式:u=331.3+(0.606 x t)m/s (t为摄氏温度)计算得到所测量的距离,显示在前面板上。 3、当处于自动测温模式时,且LabVIEW软件超时1秒时,向下位机Arduino控制器发送采集温度的命令,并将回传的温度数据显示在前面板上,实时更新温度,以保证测距尽可能精确。 5.1、前面板设计 LabVIEW上位机前面板主要有当前温度值和测量距离的显示表盘,以及自动测量选框和手动测温的按钮,如下图所示: 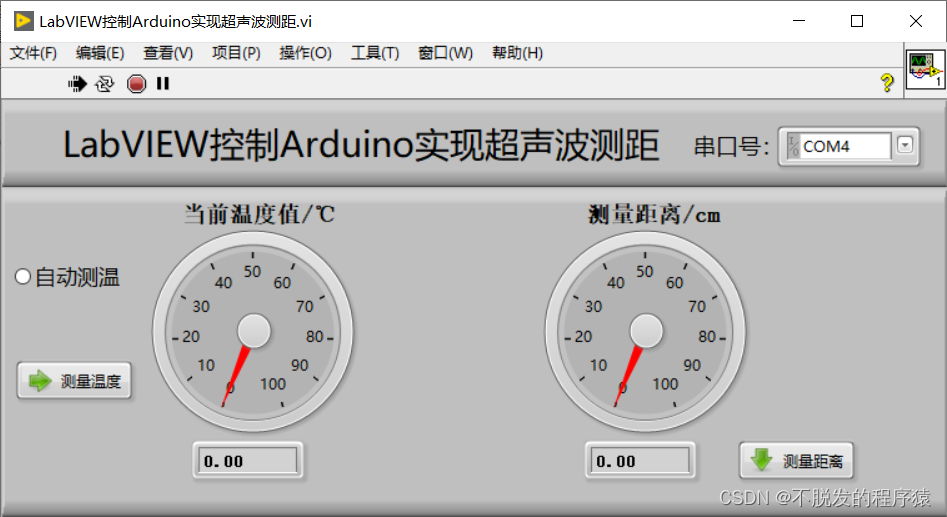 LabVIEW程序首先通过选择的Arduino Uno控制器的串口号来初始化串口通信,然后进入内嵌事件结构的While循环中,当"温度测量"按钮被按下时,则向Arduino Uno控制器发送温度测量的命令码,等待1秒之后读取Arduino Uno控制器返回的温度数据并显示出来。 当“距离测量"按钮被按下时,则向Arduino Uno控制器发送距离测量的命令码,等待1秒之后读取Arduino Uno控制器返回的超声波往返时间,并通过温度与音速公式u=331.3+(0.606 x t) m/s (t为摄氏温度),计算得到所测量的距离数据显示出来。 当“温度测量"和“距离测量"按钮在1秒内都没被按下时,LabVIEW程序进入“超时”",且当自动测量选项被使能后,则向Arduino Uno控制器发送温度测量的命令码,等待1秒之后读取Arduino Uno控制器返回的温度数据并显示出来,以实时更新当前的温度。最后关闭串口通信。 LabVIEW上位机软件中的“温度测量”、“距离测量"和“超时"的程序框图如下所示:  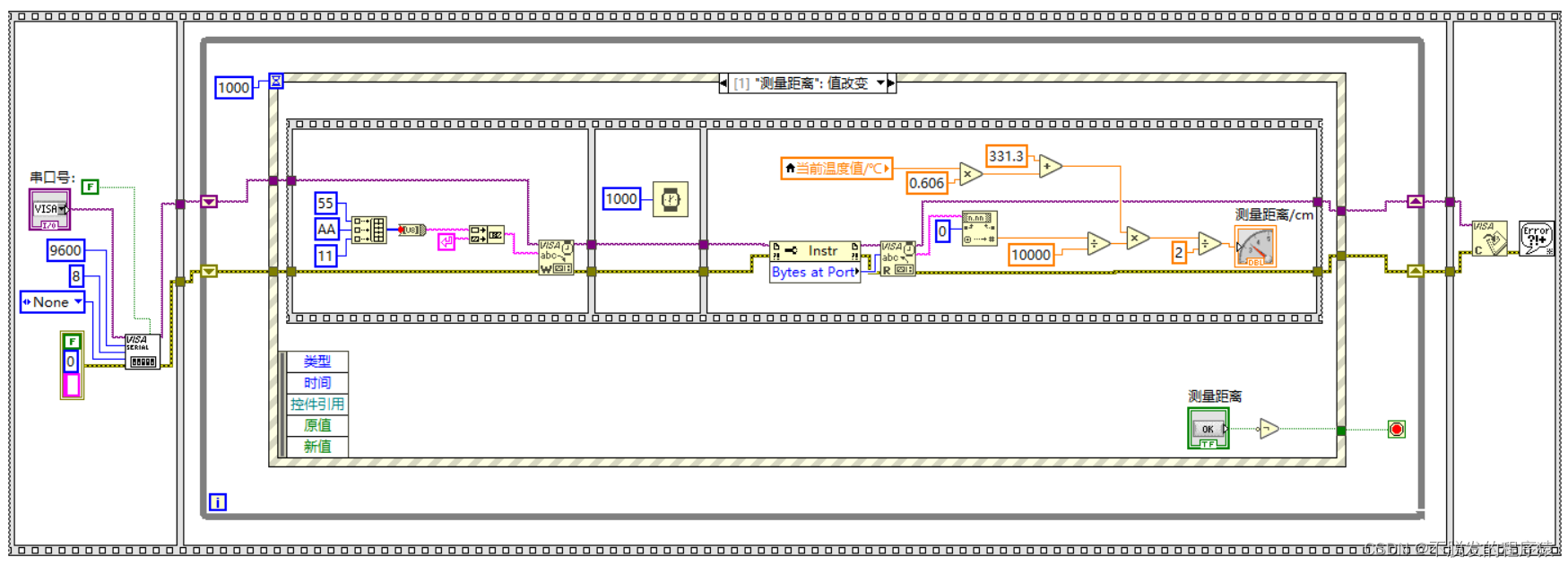  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖






