前段时间,买了一块SEN0142模块,核心就是MPU6050,也就是一个六轴加速度传感器:
这块板子,只有英文资料:6_DOF_Sensor-MPU6050__SKU_SEN0142_-DF机器人 (dfrobot.com)
DFRobot的中文WiKi上,没有看到相关的资料,商城也没有看到有卖的。
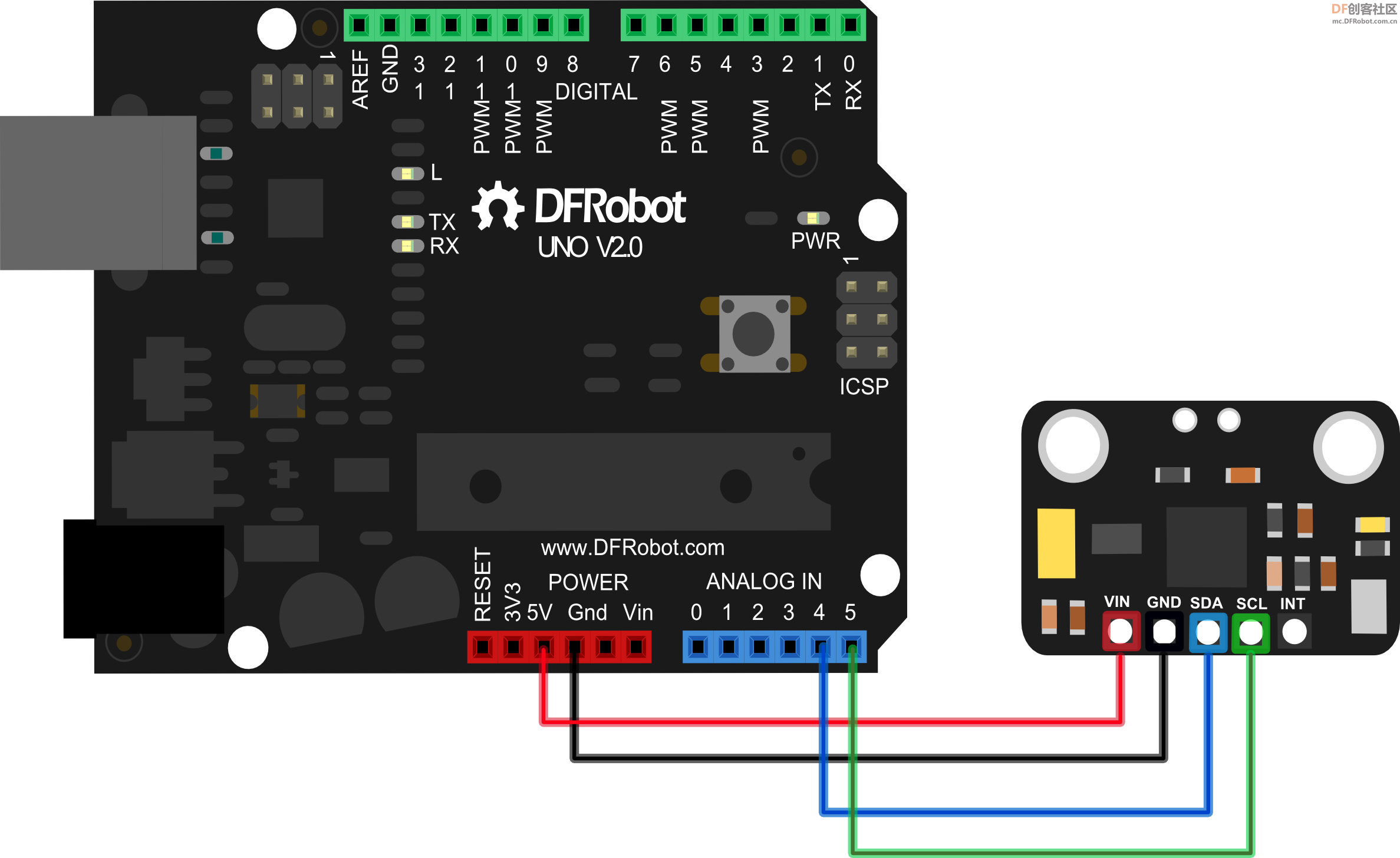
上面的英文资料中,给出的实例是Arduino UNO的:
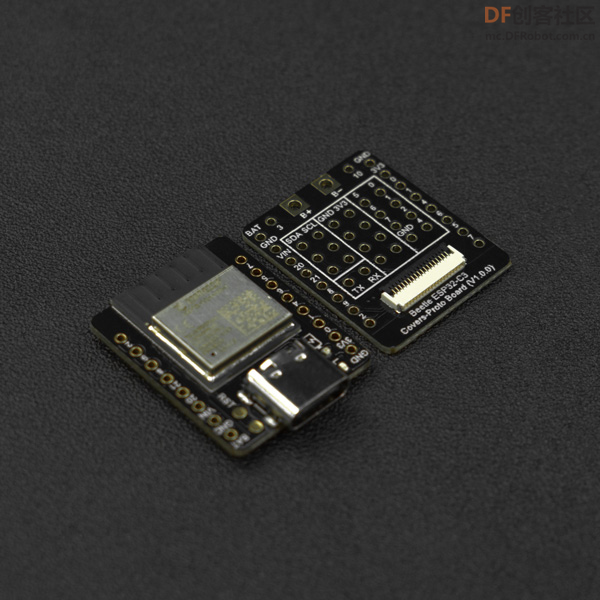
我将SEN0142连接到当前使用的ESP32_C3:
使用上面的例程,发现并不好使。
后来专门找到了Adafruit相关的实例,成功实现了通过I2C获取SEN0142模块的数据。
MPU6050是一种非常流行的空间运动传感器芯片,可以当前的三个加速度分量和三个旋转角速度,在航模、手持设备中,都使用广泛。
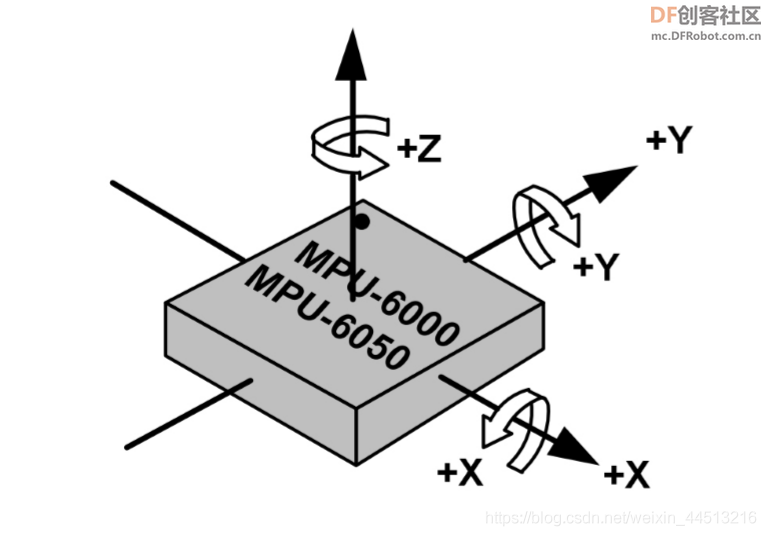
通过MPU6050,我们可以传感器当前在XYZ三个轴上的加速度,以及绕XYZ三个轴的角速度,从而感知传感器在空间运动的状态。
通常该传感器通过I2C设备与开发板相连,获取的数据包含如下的信息:
- 0x3B,加速度计的X轴分量ACC_X
- 0x3D,加速度计的Y轴分量ACC_Y
- 0x3F,加速度计的Z轴分量ACC_Z
- 0x41,当前温度TEMP
- 0x43,绕X轴旋转的角速度GYR_X
- 0x45,绕Y轴旋转的角速度GYR_Y
- 0x47,绕Z轴旋转的角速度GYR_Z
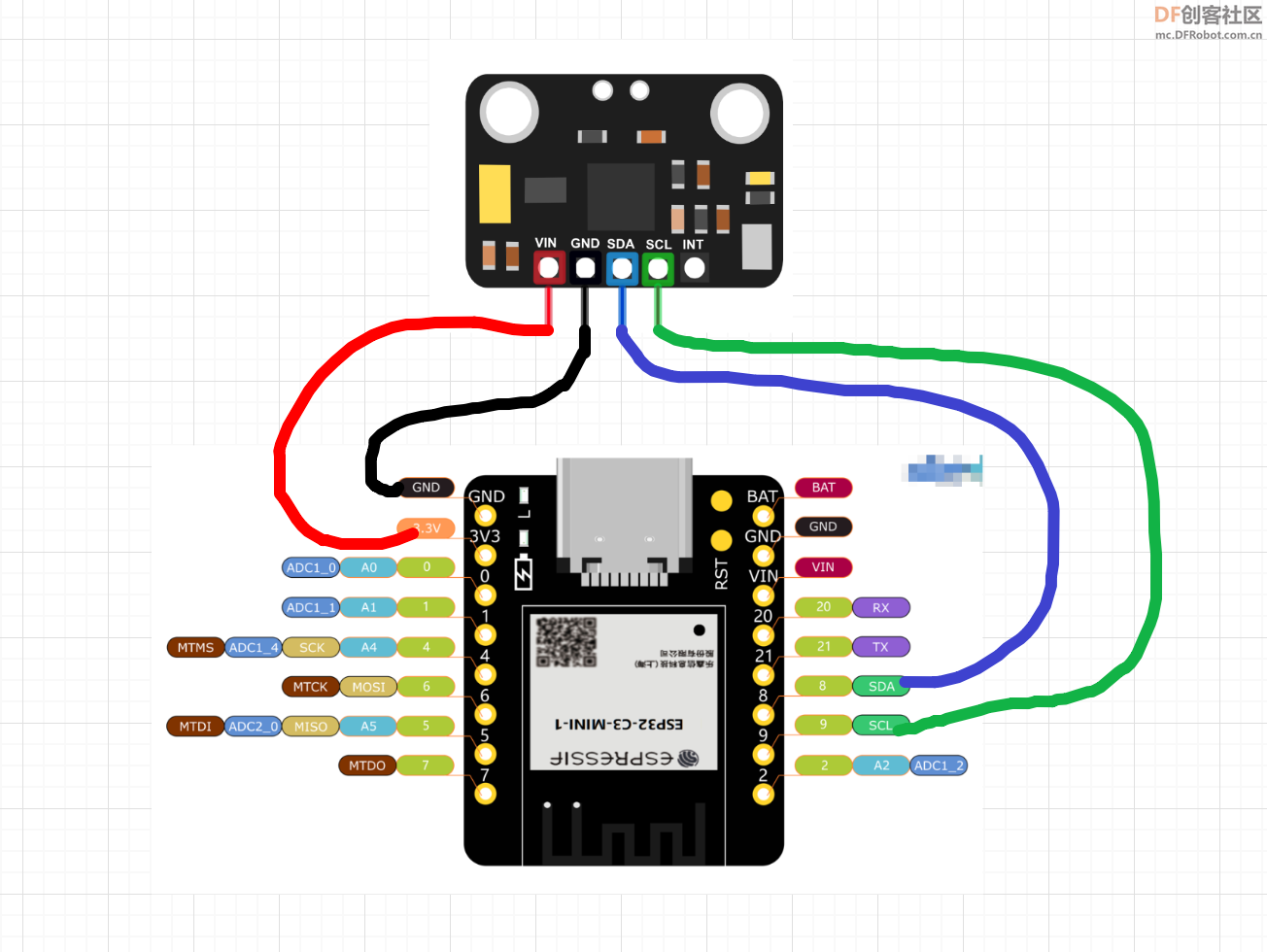
先将该传感器,按照下图,与ESP32_C3连接起来:
然后,实际操作读取数据去前,使用了一个小程序,来检测I2C设备:
- #include <Wire.h>
-
- void setup() {
- Wire.begin();
-
- Serial.begin(115200);
- while (!Serial);
- Serial.println("\nI2C Scanner");
- }
-
- void loop() {
- int nDevices = 0;
-
- Serial.println("Scanning...");
-
- for (byte address = 1; address < 127; ++address) {
- Wire.beginTransmission(address);
- byte error = Wire.endTransmission();
-
- if (error == 0) {
- Serial.print("I2C device found at address 0x");
- if (address < 16) {
- Serial.print("0");
- }
- Serial.print(address, HEX);
- Serial.println(" !");
-
- ++nDevices;
- } else if (error == 4) {
- Serial.print("Unknown error at address 0x");
- if (address < 16) {
- Serial.print("0");
- }
- Serial.println(address, HEX);
- }
- }
- if (nDevices == 0) {
- Serial.println("No I2C devices found\n");
- } else {
- Serial.println("done\n");
- }
- delay(5000); // Wait 5 seconds for next scan
- }
下载该程序后,打开串口监听,会有如下的返回信息:
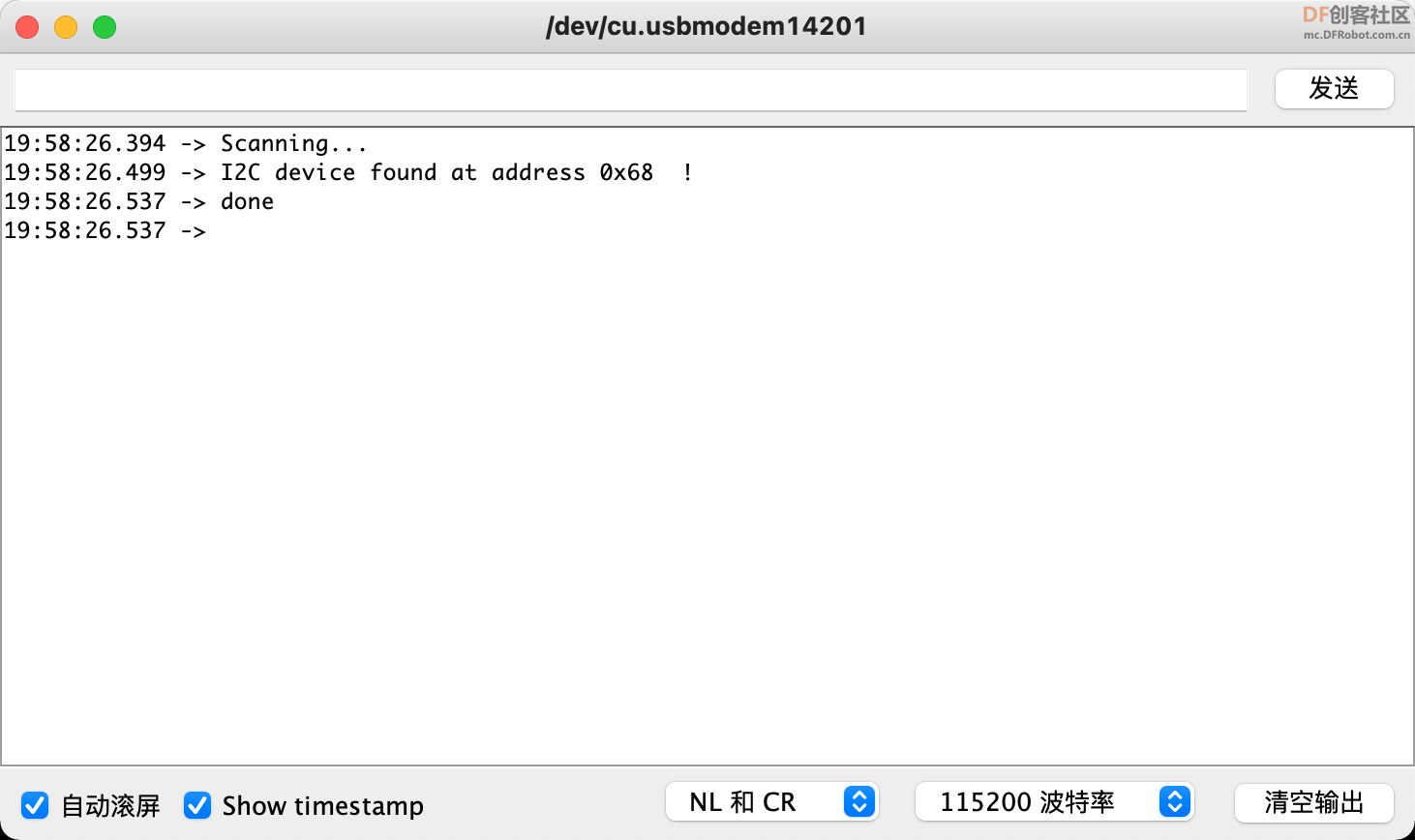
其中会列出当前连接的I2C设备的地址,MPU6050默认为0x68。
如果没有找到I2C设备,说明连接没有连好。
在使用完整的读取MPU6050数据的代码:
- // Basic demo for accelerometer readings from Adafruit MPU6050
-
- // ESP32 Guide: https://RandomNerdTutorials.com/esp32-mpu-6050-accelerometer-gyroscope-arduino/
- // ESP8266 Guide: https://RandomNerdTutorials.com/esp8266-nodemcu-mpu-6050-accelerometer-gyroscope-arduino/
- // Arduino Guide: https://RandomNerdTutorials.com/arduino-mpu-6050-accelerometer-gyroscope/
-
- #include <Adafruit_MPU6050.h>
- #include <Adafruit_Sensor.h>
- #include <Wire.h>
-
- Adafruit_MPU6050 mpu;
-
- void setup(void) {
- Serial.begin(115200);
- while (!Serial)
- delay(10); // will pause Zero, Leonardo, etc until serial console opens
-
- Serial.println("Adafruit MPU6050 test!");
-
- // Try to initialize!
- if (!mpu.begin()) {
- Serial.println("Failed to find MPU6050 chip");
- while (1) {
- delay(10);
- }
- }
- Serial.println("MPU6050 Found!");
-
- mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
- Serial.print("Accelerometer range set to: ");
- switch (mpu.getAccelerometerRange()) {
- case MPU6050_RANGE_2_G:
- Serial.println("+-2G");
- break;
- case MPU6050_RANGE_4_G:
- Serial.println("+-4G");
- break;
- case MPU6050_RANGE_8_G:
- Serial.println("+-8G");
- break;
- case MPU6050_RANGE_16_G:
- Serial.println("+-16G");
- break;
- }
- mpu.setGyroRange(MPU6050_RANGE_500_DEG);
- Serial.print("Gyro range set to: ");
- switch (mpu.getGyroRange()) {
- case MPU6050_RANGE_250_DEG:
- Serial.println("+- 250 deg/s");
- break;
- case MPU6050_RANGE_500_DEG:
- Serial.println("+- 500 deg/s");
- break;
- case MPU6050_RANGE_1000_DEG:
- Serial.println("+- 1000 deg/s");
- break;
- case MPU6050_RANGE_2000_DEG:
- Serial.println("+- 2000 deg/s");
- break;
- }
-
- mpu.setFilterBandwidth(MPU6050_BAND_5_HZ);
- Serial.print("Filter bandwidth set to: ");
- switch (mpu.getFilterBandwidth()) {
- case MPU6050_BAND_260_HZ:
- Serial.println("260 Hz");
- break;
- case MPU6050_BAND_184_HZ:
- Serial.println("184 Hz");
- break;
- case MPU6050_BAND_94_HZ:
- Serial.println("94 Hz");
- break;
- case MPU6050_BAND_44_HZ:
- Serial.println("44 Hz");
- break;
- case MPU6050_BAND_21_HZ:
- Serial.println("21 Hz");
- break;
- case MPU6050_BAND_10_HZ:
- Serial.println("10 Hz");
- break;
- case MPU6050_BAND_5_HZ:
- Serial.println("5 Hz");
- break;
- }
-
- Serial.println("");
- delay(100);
- }
-
- void loop() {
- /* Get new sensor events with the readings */
- sensors_event_t a, g, temp;
- mpu.getEvent(&a, &g, &temp);
-
- /* Print out the values */
- Serial.print("Acceleration X: ");
- Serial.print(a.acceleration.x);
- Serial.print(", Y: ");
- Serial.print(a.acceleration.y);
- Serial.print(", Z: ");
- Serial.print(a.acceleration.z);
- Serial.println(" m/s^2");
-
- Serial.print("Rotation X: ");
- Serial.print(g.gyro.x);
- Serial.print(", Y: ");
- Serial.print(g.gyro.y);
- Serial.print(", Z: ");
- Serial.print(g.gyro.z);
- Serial.println(" rad/s");
-
- Serial.print("Temperature: ");
- Serial.print(temp.temperature);
- Serial.println(" degC");
-
- Serial.println("");
- delay(500);
- }
编译前,需要先安装调用的库:
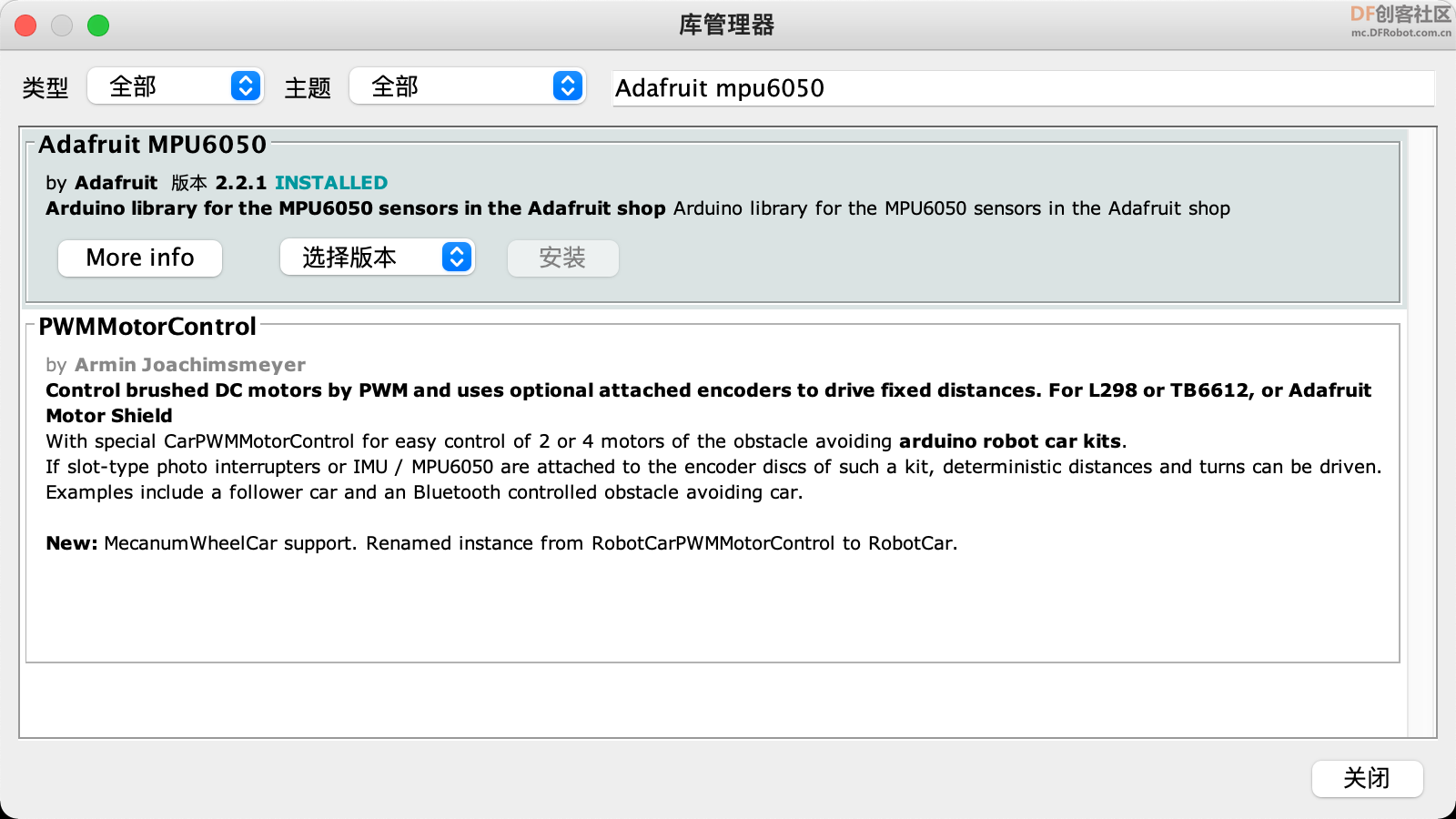
点按安装时,会提示安装关联的库,选择一并安装即可。
安装完成,即可编译下载后,打开串口监听工具,移动传感器,可以看到如下的信息:
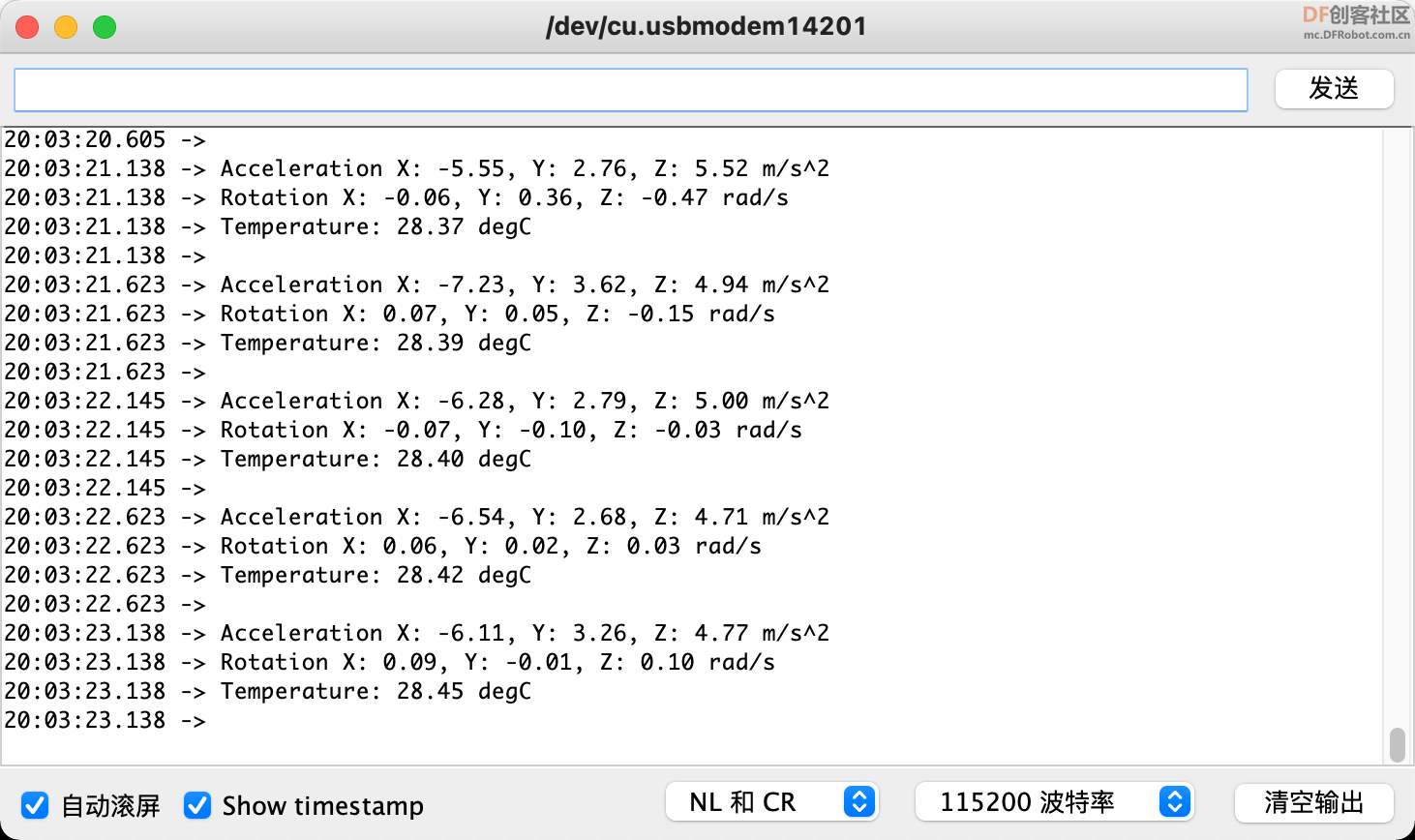
如果对着传感器哈气,对应的Temperature值会上升,表示当前温度。
其他的数据:
加速度:Acceleration X: 3.45, Y: 9.25, Z: -0.96 m/s^2
角速度:Rotation X: -0.01, Y: 0.02, Z: -0.00 rad/s
通过以上的数据,再结合一定的算法,就能够用于非空等场合了。
|  编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






