|
48359| 2
|
[项目] 好玩的自制机器人 | 乒乓拾者 |

|
本帖最后由 怀若谷 于 2022-11-6 19:46 编辑 观看作品演示视频请移步微信公众号文章 https://mp.weixin.qq.com/s/XzxDDLZMgeQaUVow0tDdFw 项目源起 开源机器人项目是一个开源教学项目,在第八届全国中小学STEAM教育大会上由谢作如老师、吴俊杰老师为代表的虚谷计划专家组及合作伙伴共同发布。开源机器人项目的主体是开源机器人联合推动者,联合推动者聚合了全国一线教师、教育专家、科教企业、高等院校、科研院所等众多爱好者共同参与。该项目已开展了两年时间,成果显著,其中为项目专门开发的开源控制板已经发展到了第二代。该控制板结合激光切割与3D打印技术,可以自由创作出各种各样的机器人作品。  图1 开源机器人控制板 半年前,我有幸得到了两套最新版本的开源机器人控制板,于是进行了一些学习和实践。在这个过程中,感受到了自制机器人的乐趣,萌发了制作一系列机器人项目的想法,本文介绍首个作品“乒乓拾者”的制作过程。控制板介绍 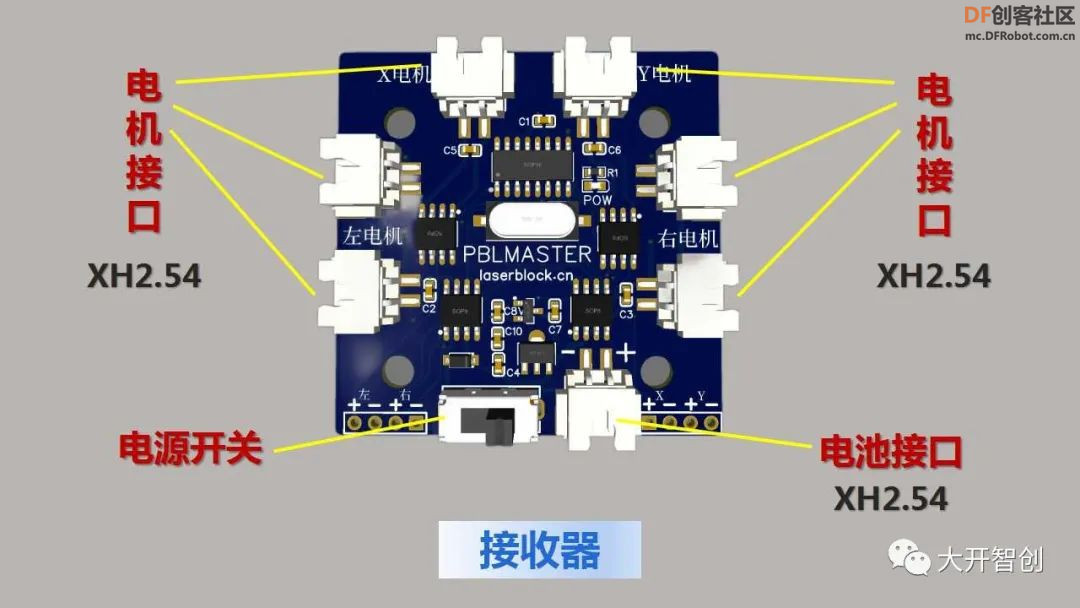 图2 发射器  图3 接收器 这套控制板由发射器(图2)和接收器(图3)组成,无需编程,所以功能相对简单。主要功能是遥控4路电机运转,通过8个按钮来控制4路电机的正反转。其中左右电机有两个接口,单路可同时带动两个电机;所以,这套控制板最多可连接并控制6个电机。通常左右电机为驱动轮的动力,X电机和Y电机用于实现其他的功能。当某个按钮被按下时,对应的电机会转动;当按钮被释放时,电机停止转动。 作品介绍 “乒乓拾者”,是一个通过遥控方式实现抓取乒乓球的机器人(见图4)。主要由开源机器人控制板和激光切割的木板材料组成,大部分连接结构采用榫卯结构,以方便组装和降低成本。 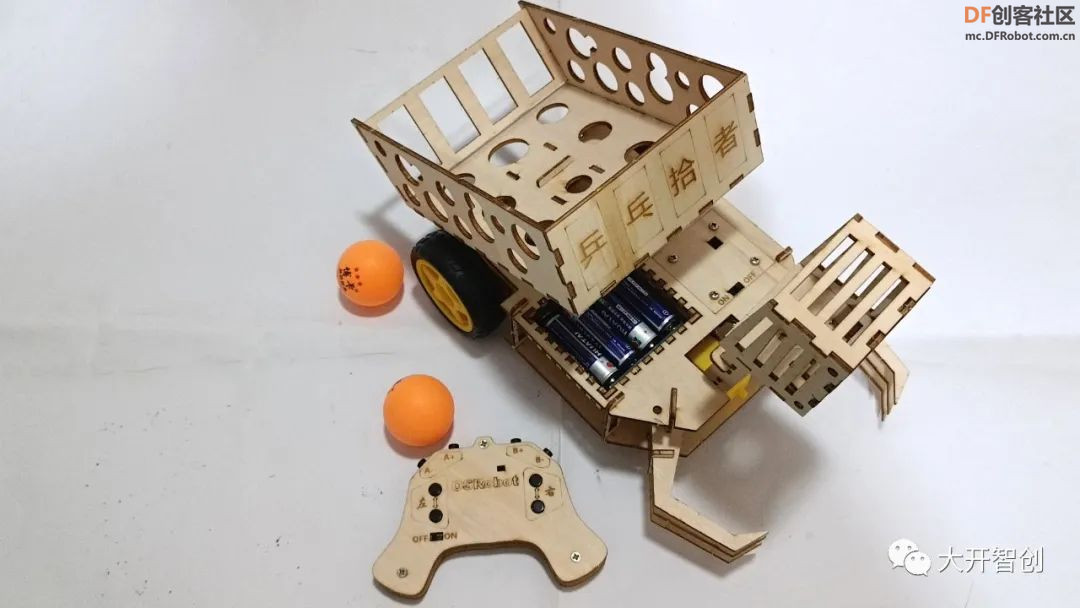 图4 “乒乓拾者”机器人 该机器人移动方式和普通的遥控小车相同,使用两个电机带动两个车轮作为驱动轮,前面装有一个滚珠万向轮。使用一个电机带动机械手臂去拾取乒乓球,使用一个电机控制车斗的翻起和回位。 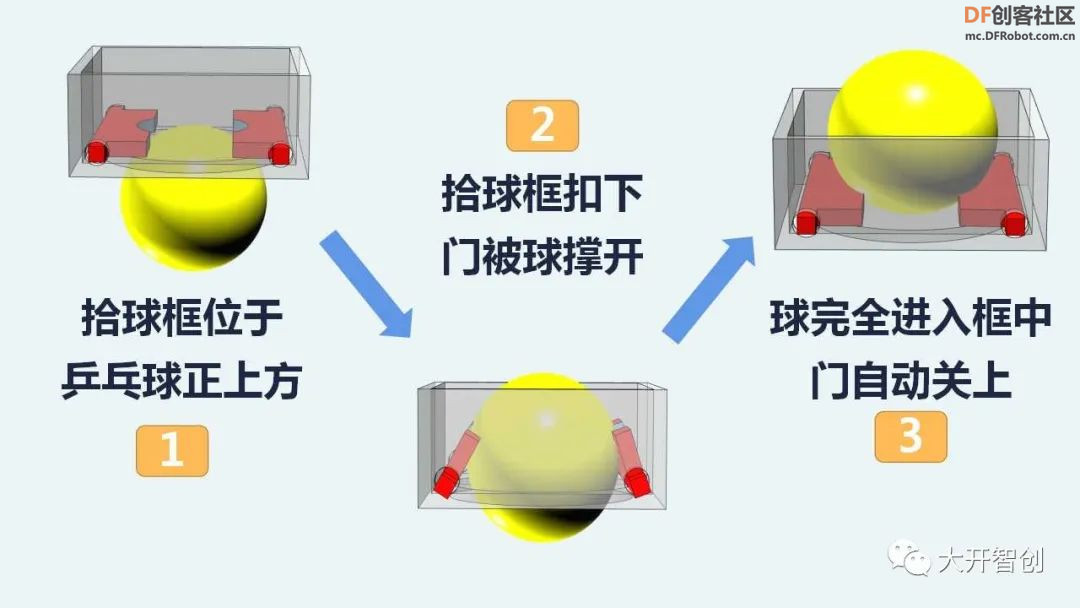 图5 拾乒乓球实现原理 本作品的创新之处在拾取乒乓球机构的设计方案。考虑到控制板不支持外接SG90舵机,而TT马达较重且转速不能控制,没有采用机械爪结构,而是采用了一个“重力门”装置来巧妙实现,原理图见图5。制作一个无盖的长方体拾球框,在底板上开了一个比乒乓球略大的圆口,圆口上方装有两扇门;当扣到乒乓球后,门会被撑开;当乒乓球球整体进框后,门在重力的作用下自动闭合,从而让乒乓球只能进不能出。 材料清单
制作过程 (一)结构设计 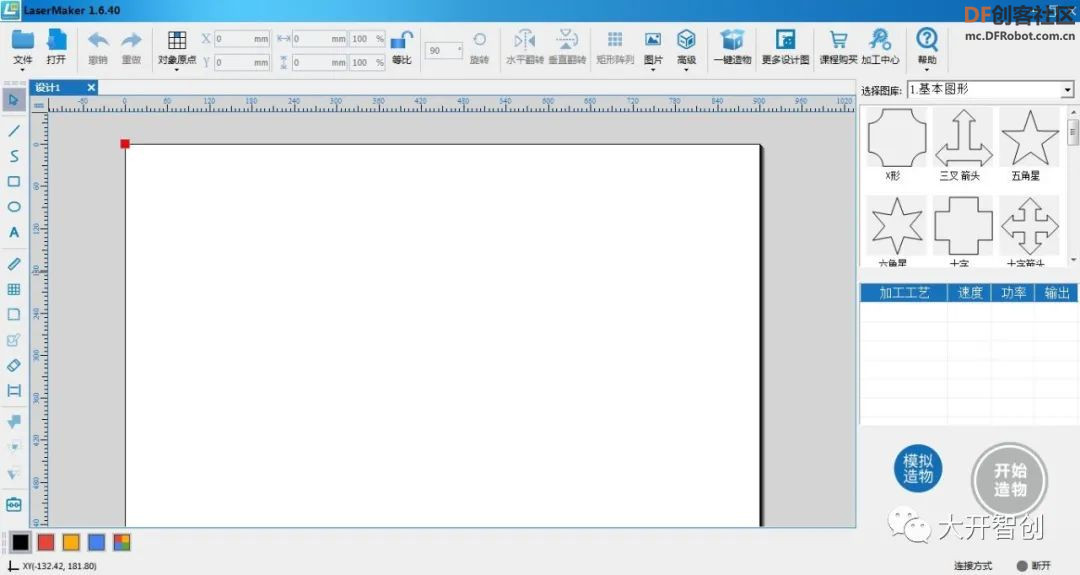 图6 制图软件LaserMaker 该机器人的结构件采用3毫米椴木板制作,激光切割图纸是使用LaserMaker软件制作的。结构件之间的连接大量采用榫卯结构,木制结构件和电子材料的连接采用M3螺丝进行连接紧固。为了减轻重量和增加美观度,较大的木件进行了镂空处理。 1. 设计底盘  图7 底盘及相关部件图纸 机器人底盘采用双层结构,上下底盘之间的间距为4厘米,可将电机、接收器和电池盒纳入其间。这样设计不仅使机身结构坚固,而且更加美观。 2. 设计拾球机构 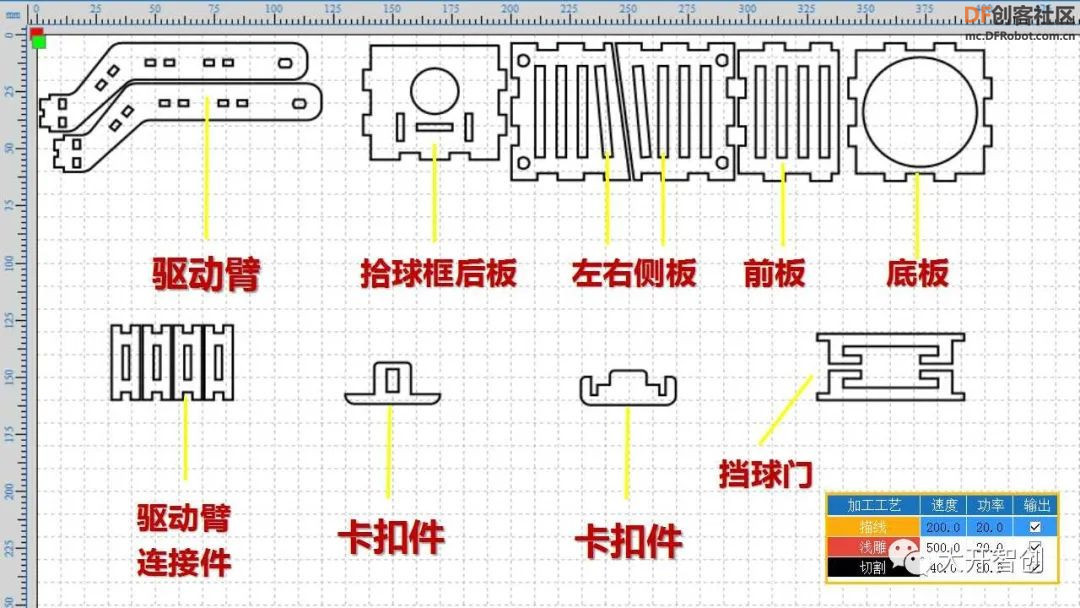 图8 拾球机构及相关部件图纸 拾球机构由驱动臂和拾球框组成。此部分的设计是本作品能否成功完成的关键,需要反复修改图纸、切割木件、组装验证,是个不断试错的过程。其中,驱动臂的横向长度决定了能否成功将球倒入车斗中;驱动臂的纵向高度以及与拾球框的连接位置决定了球框能否完全将在地面上的乒乓球完全扣入框中;挡球门的形状和尺寸,决定了能否将球留在框中。由于在拾球时,会不断撞击地面,该机构需要有一定的坚固程度,所以除了连接件外,还设计了两个卡扣件对连接处加固。如有必要,后期安装时还可以使用白乳胶。 3. 设计车斗 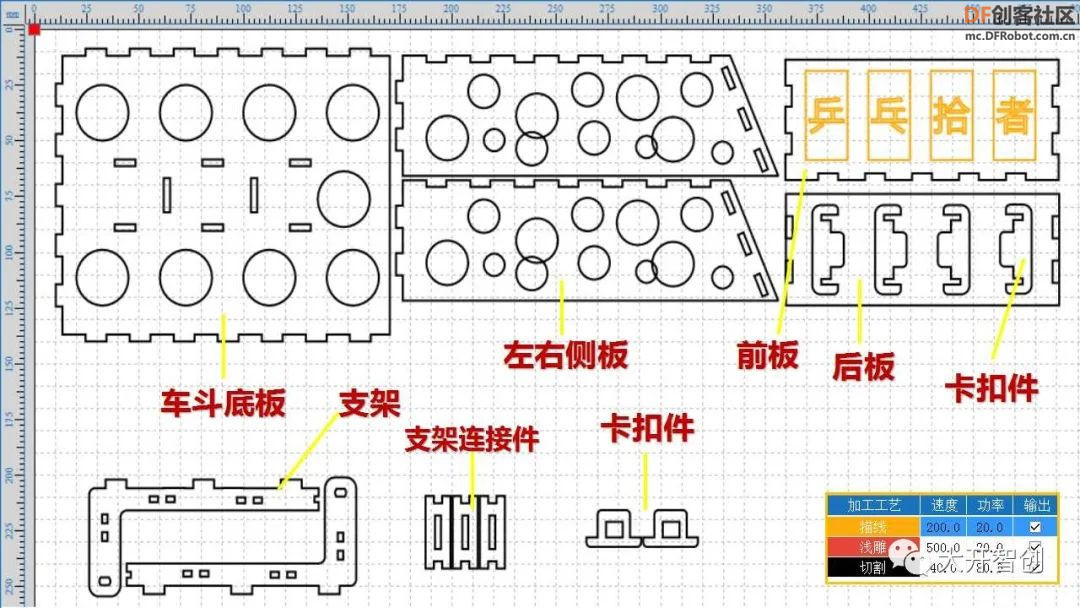 图9 车斗及相关部件图纸 设计车斗时,尺寸的大小需要综合底盘大小、乒乓球的大小等因素进行考量。车斗设计好后还需要设计一个支架使其能与电机的转轴进行连接。由于车斗及支架经常在翻起和回位两种动态中切换,它们之间的连接需要增加一些卡扣件加固。 4. 设计护具 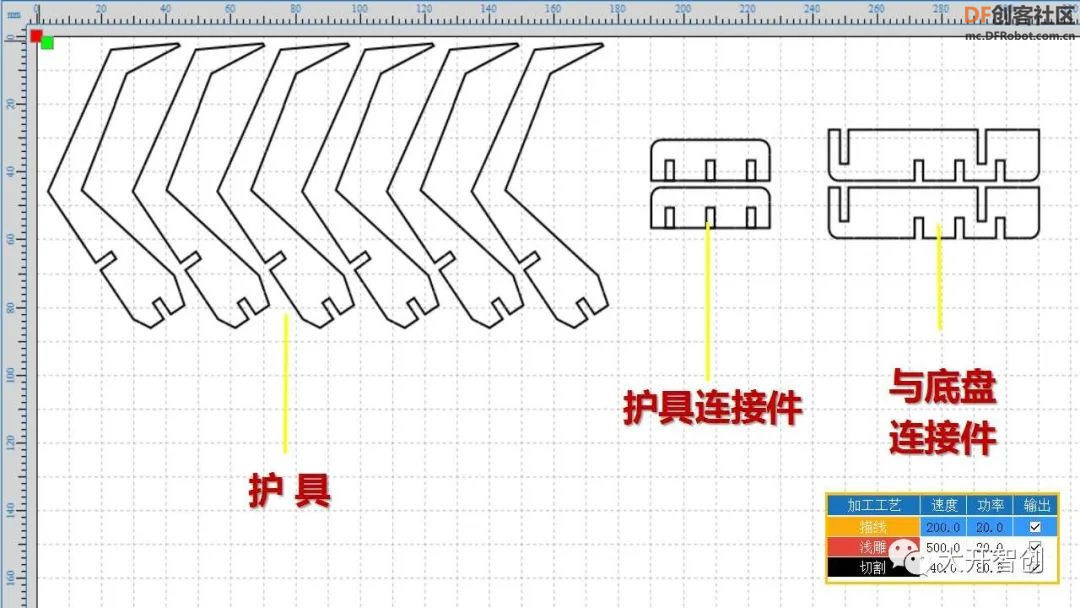 图10 护具及相关部件图纸护具 可用于格斗中,也可用于调整乒乓球的位置,在不同的场景下有不同的用处。当然,加上护具后,也会显得更加霸气、更加美观。我们可以根据自己的审美和项目的需要设计它的形状。护具一般安装在底盘的侧前方,需要制作一些连接件使护具能与底盘结合起来。 5. 设计遥控器外壳 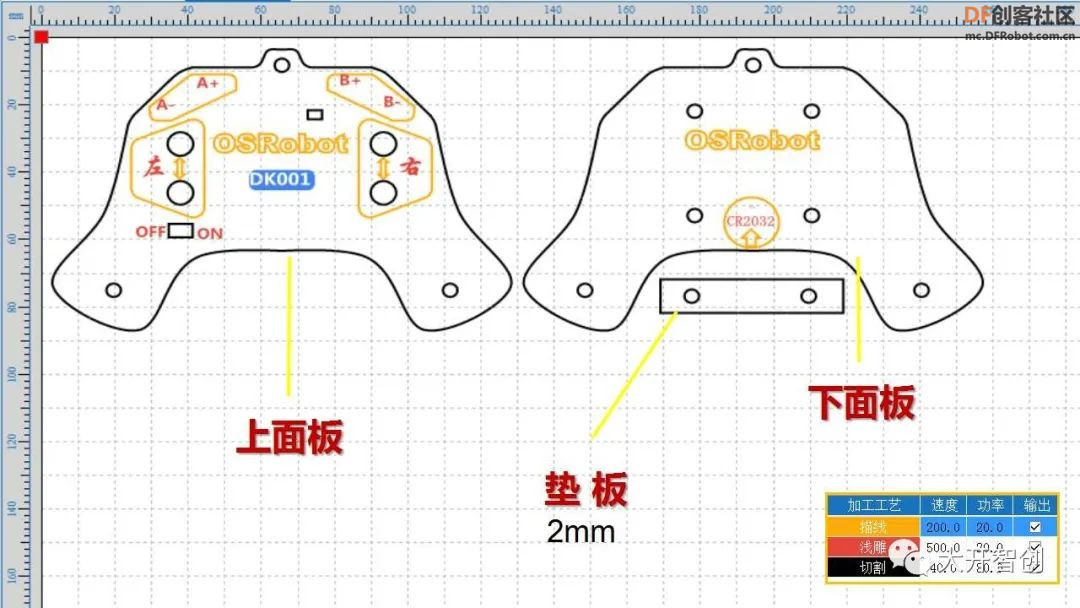 图11 遥控器图纸 遥控器的外壳其实已经有很多现成的设计方案,我在学习借鉴的基础上进行了修改,成品比较小巧,手感也很不错。其中设计有一个矩形的垫板,是因为发射器的电路板背面的焊点分布在一边,会造成安装后与下面板不能平行,加一个垫板就能解决这个问题。这个垫板最好使用2毫米的椴木板材料。 6. 图纸排版 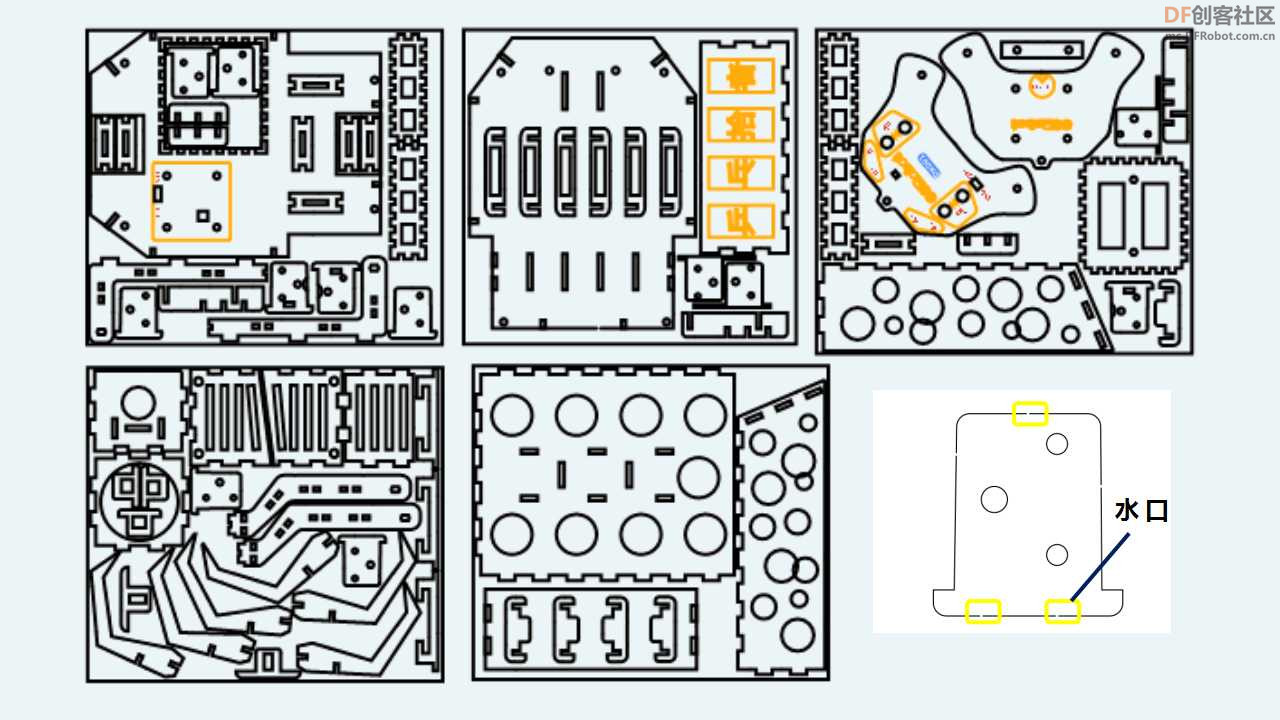 图12 完整图纸 全部部件都绘制好后,根据激光切割机的工作平台大小及包装运输需要将全部部件进行整理排列。排版时,尽可能地布满整块木板的幅面,然后使用橡皮檫工具制作水口,便于切割后快速取件和运输,这样做组装时寻找部件也更加方便。对于一些容易损坏的部件,可以复制几个作为备用件。 (二)切割制件 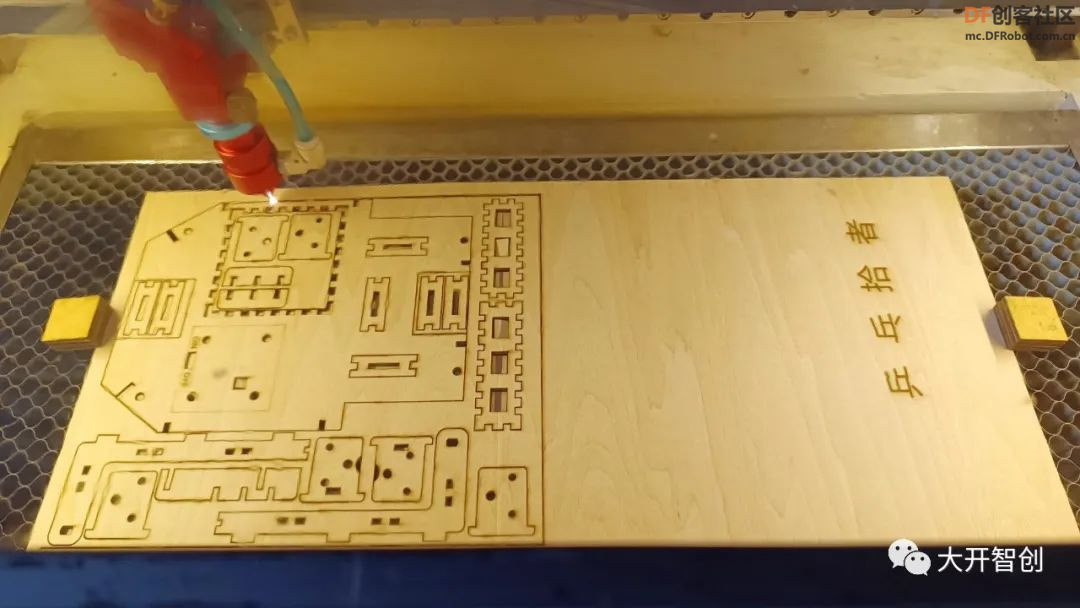 图13 激光切割机加工 使用激光切割机对椴木板(3mm)进行加工。切割完成后,将整块板取出备用,不要急于将各个零部件单独取下。 (三)给木件编号 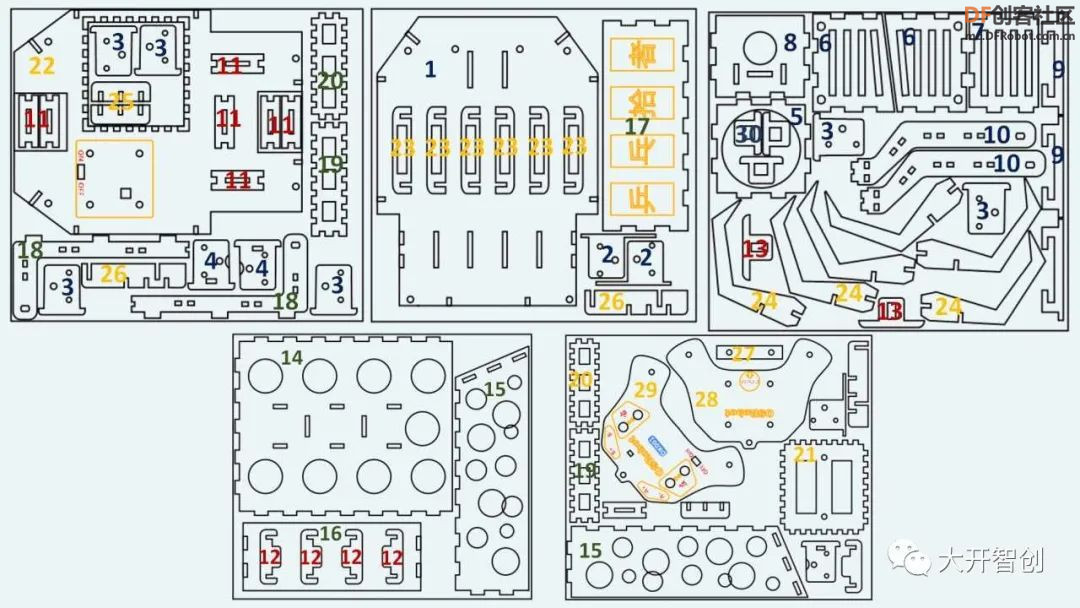 图14 给木件编号 为了方便组装,以及批量制作作品或者编写组装教程的需要,最好给每一个木件编上号码。后面的组装说明也是以编号来指示部件。 (五)组装 木件及其他各种材料都准备好后,即可着手组装。组装步骤如下: 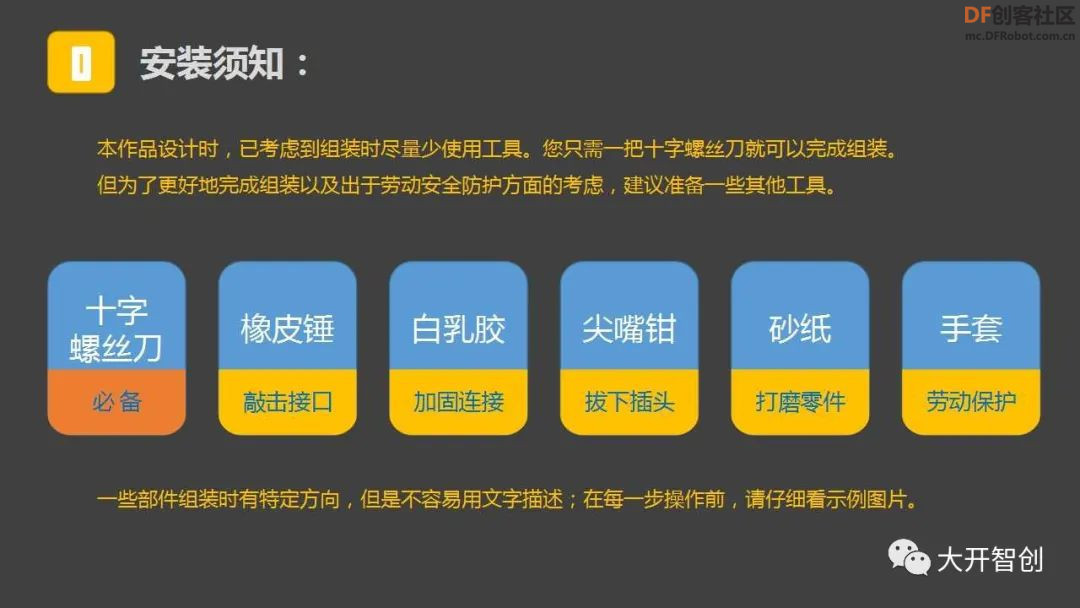 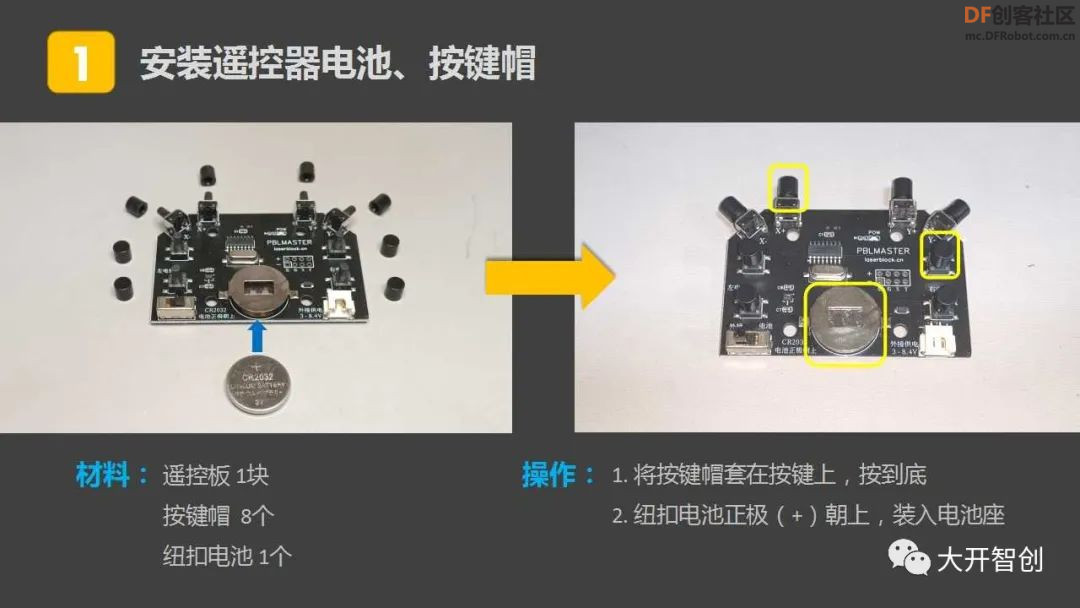 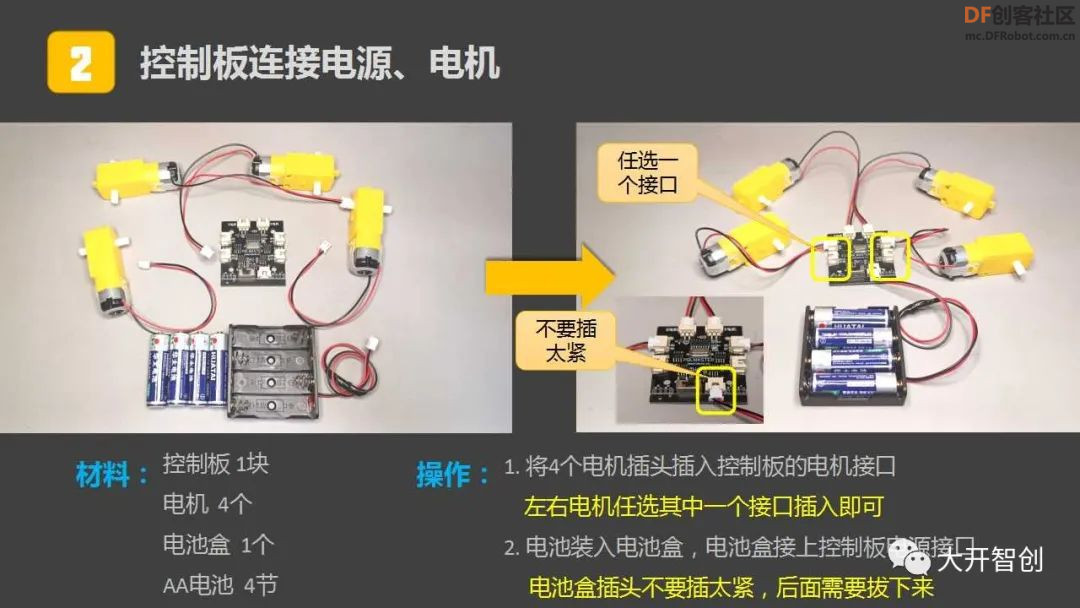     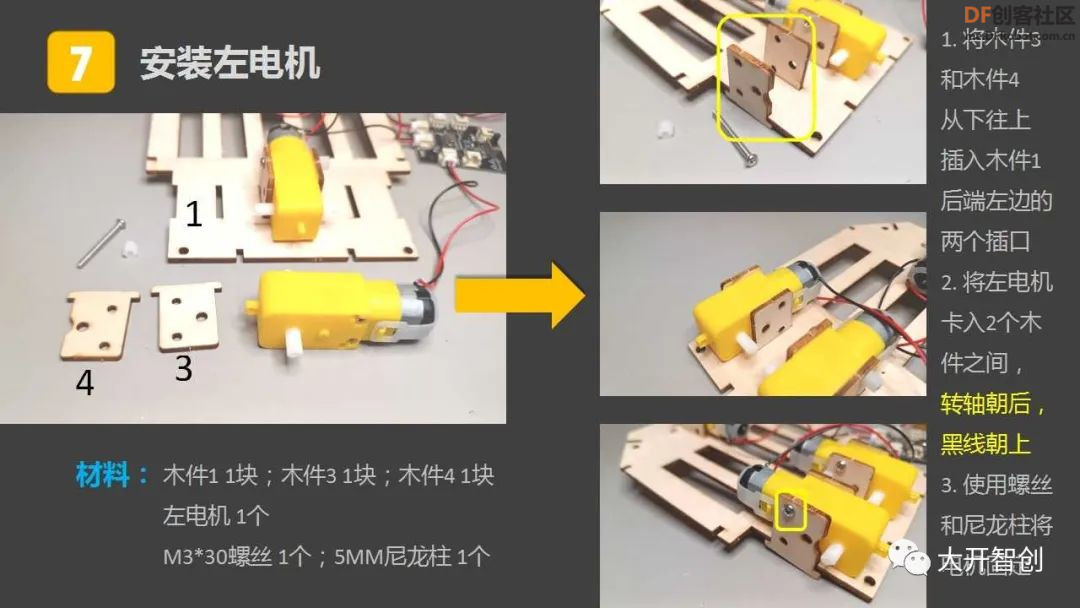 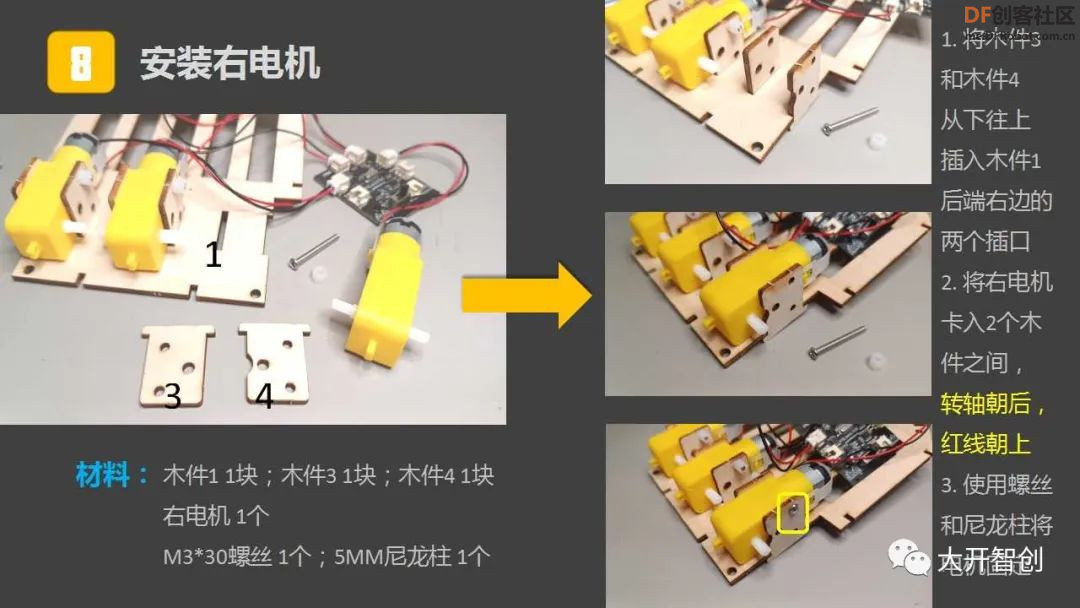  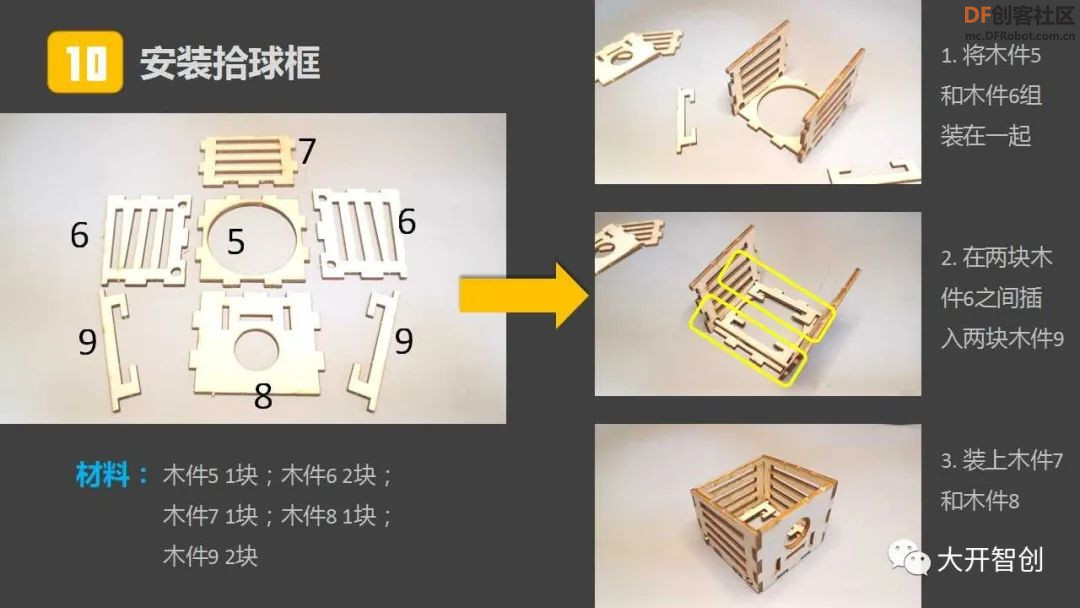 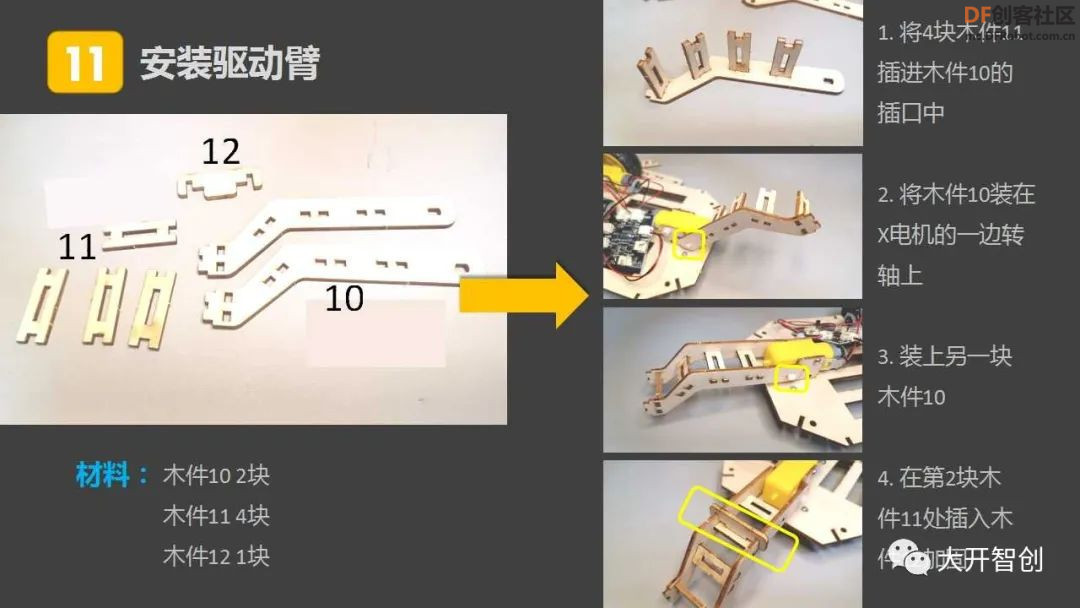 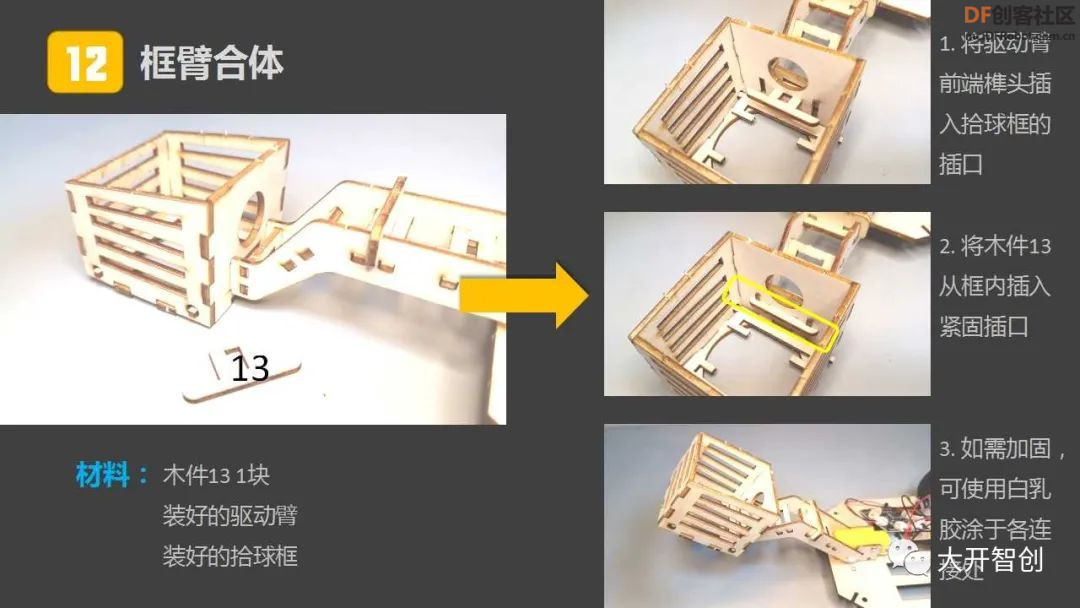 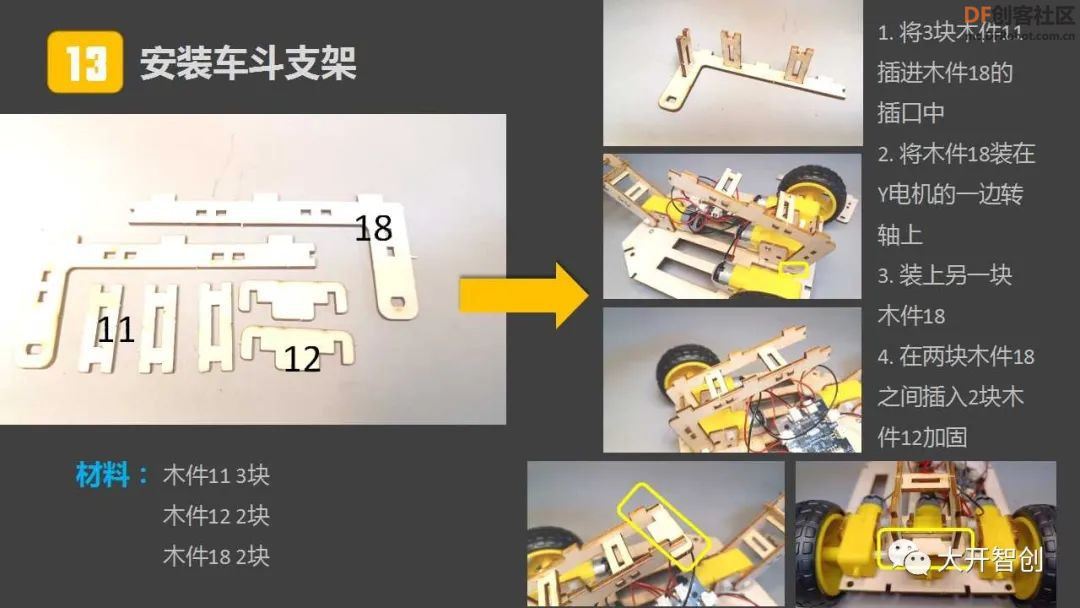 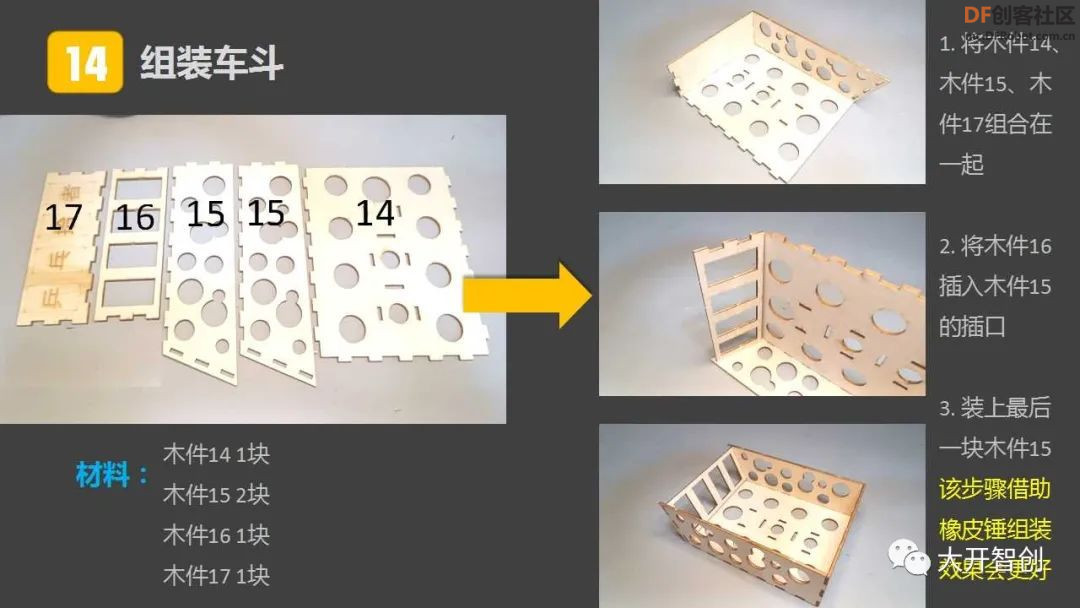  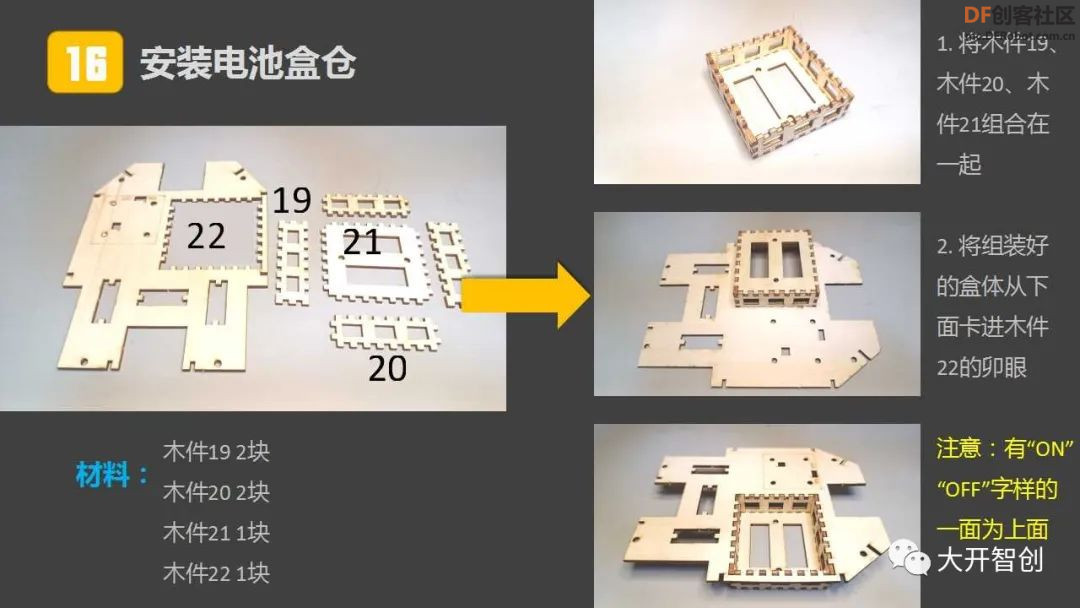 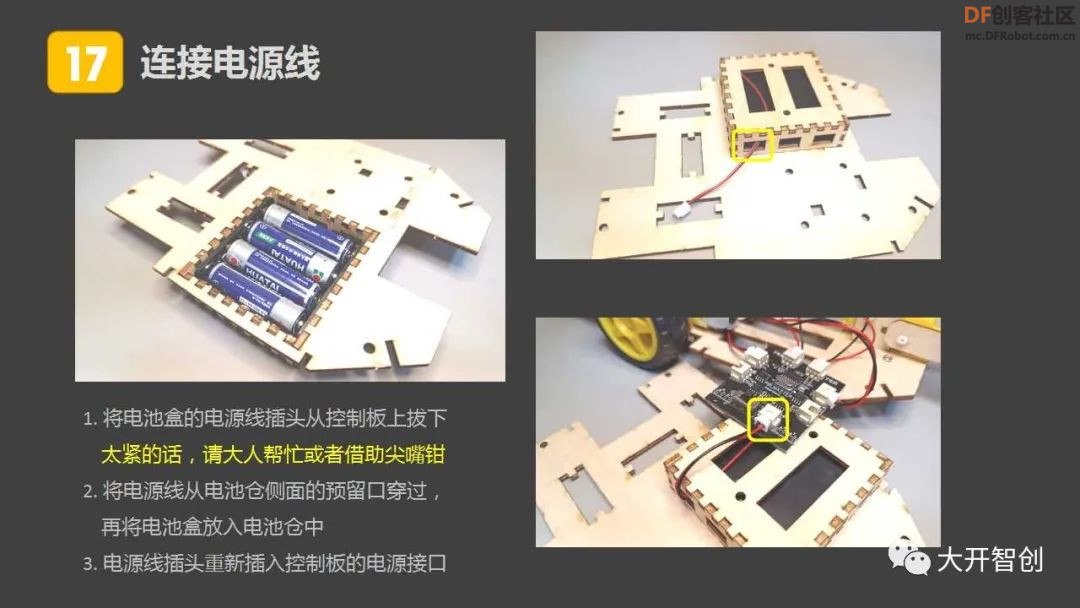 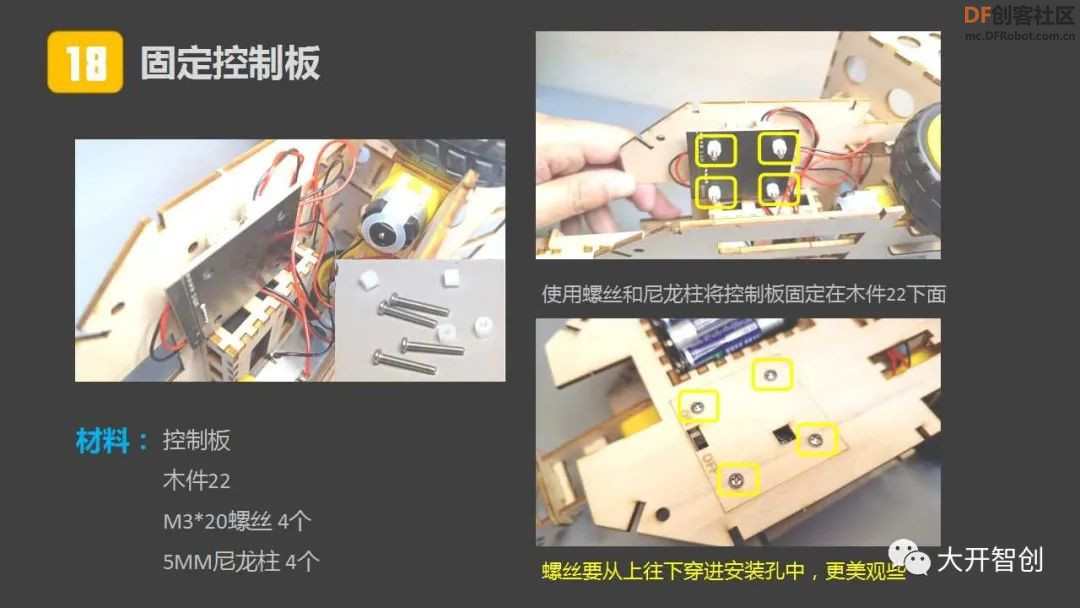 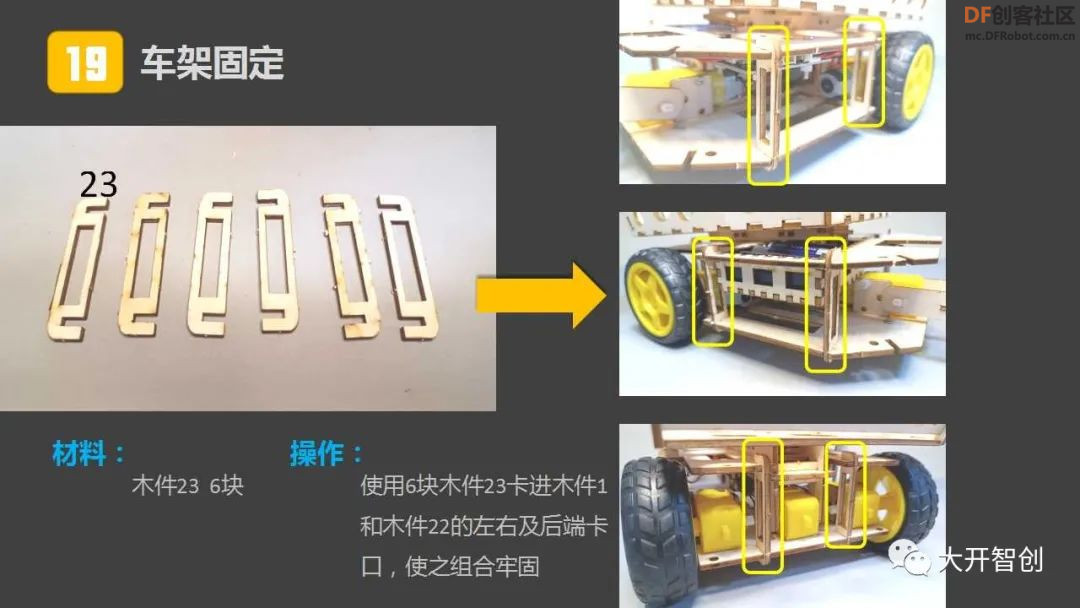 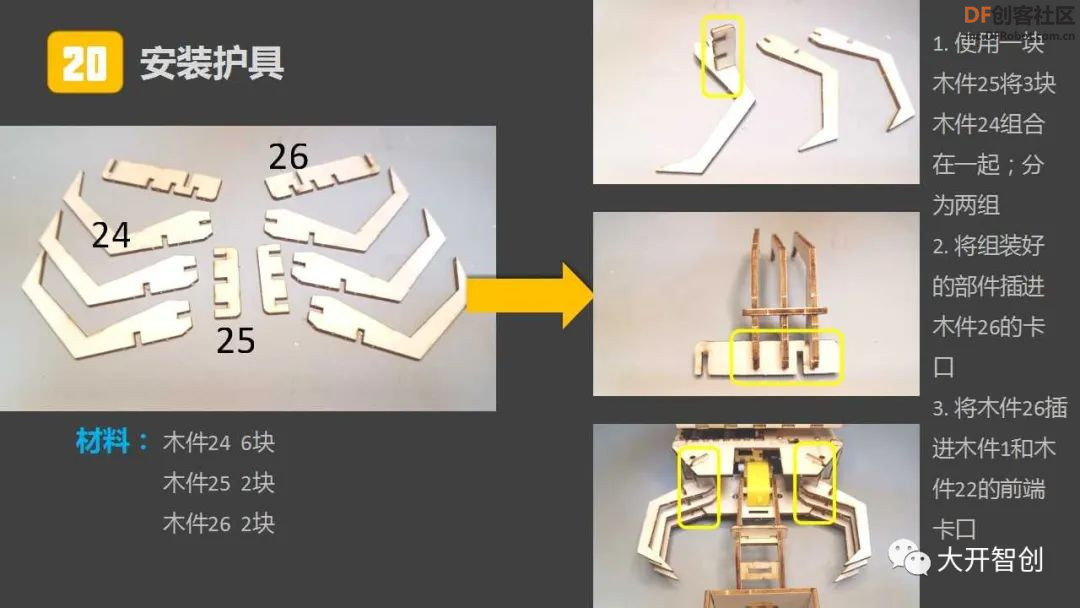 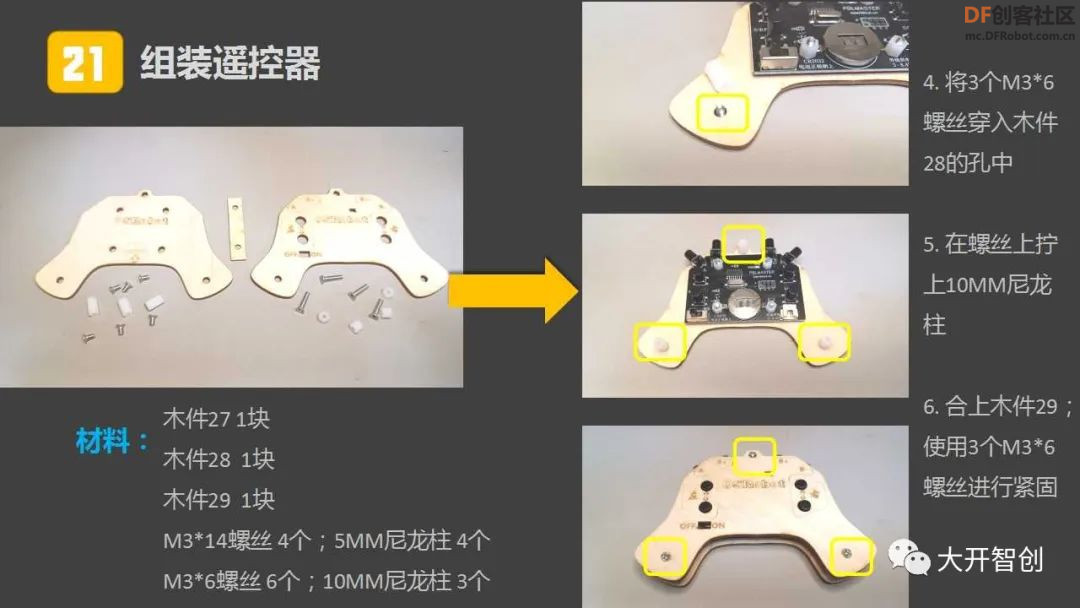 项目小结 利用开源机器人控制板结合激光切割技术来制作机器人,整体材料成本很低。本项目的全部材料加上切割加工费用,也不到一百元钱。和采用乐高积木搭建的机器人相比,创作的自由度更高,但对设计者的空间想象能力更具有挑战性。 通过这个作品的制作,可以激发孩子们的学习热情、培养工程思维、提高信息技术素养。这个作品完成后,非常好玩,而要玩好它则需要耐心和掌握一定的技巧。我们还可以去为它设计一些比赛规则,使其成为一项有趣的科技活动。 图纸源文件、组装指南PDF文件在附件中下载↓ |

219.09 KB, 下载次数: 3511

253.48 KB, 下载次数: 3427
7.6 MB, 下载次数: 3760
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






