|
11138| 3
|
[项目] 志童道合 | 给仰望小车做个方向盘式的遥控器 |
|
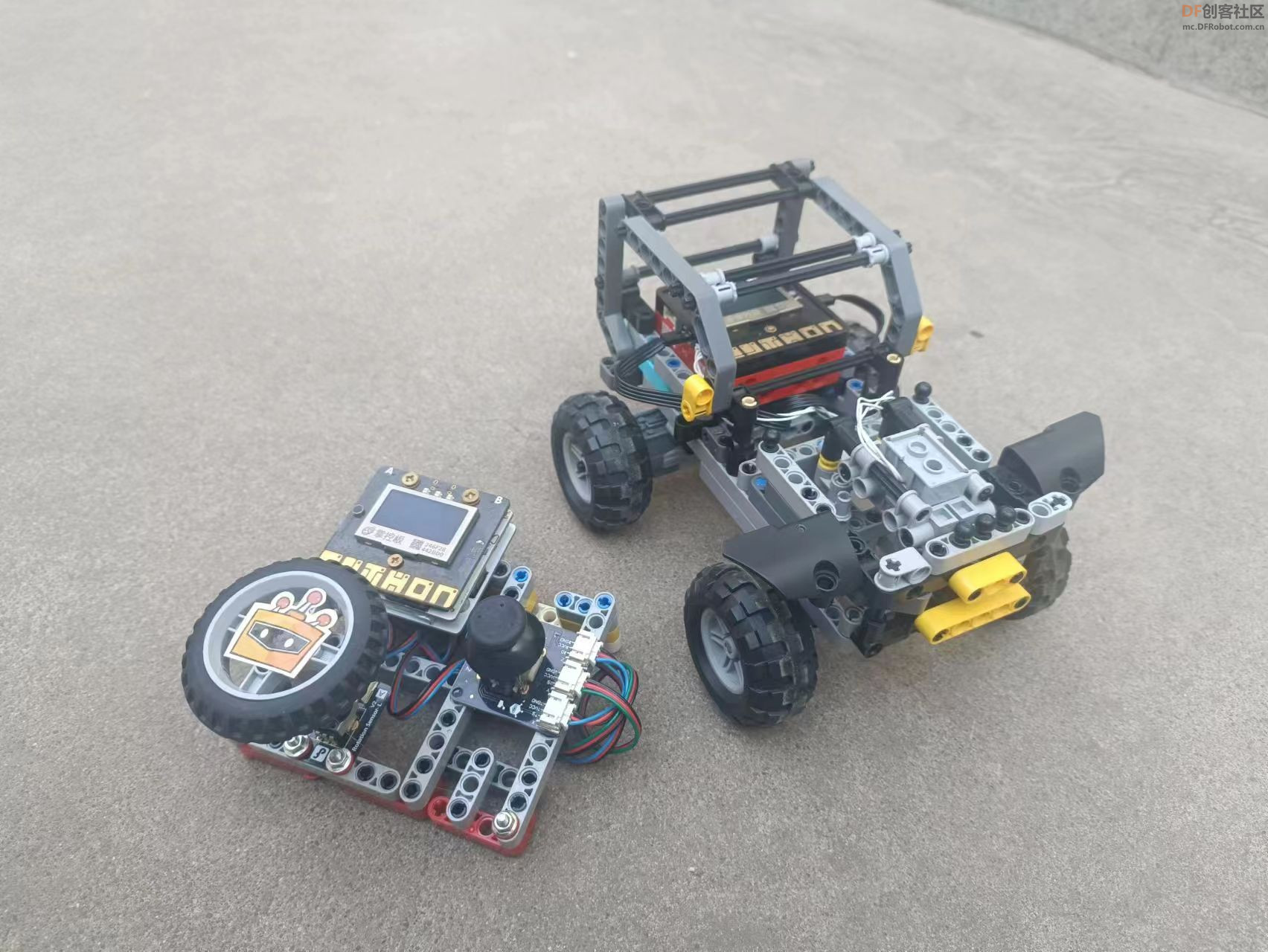
本帖最后由 rzyzzxw 于 2022-12-22 19:23 编辑 给仰望小车做个方向盘式的遥控器 仰望小车_方向盘遥控_哔哩哔哩_bilibili 目标:给仰望小车做一个方向盘式的遥控器。  上图展示的就是我用乐动掌控和乐动电机、乐动电机搭建的仰望小车,在前面的帖子中已经汇报过完成的任务,它是后驱的,可以前进和后退,两个前轮可以通过舵机来调节转向,可以用多种方式来遥控。 可是我还是有很多不满意的地方,软件硬件需要迭代的地方有很多。 这个帖子汇报我最今的探索成果:做了一个方向盘式的遥控器,可以调节转向角度的大小,可以挂前进档,倒档,停车档。 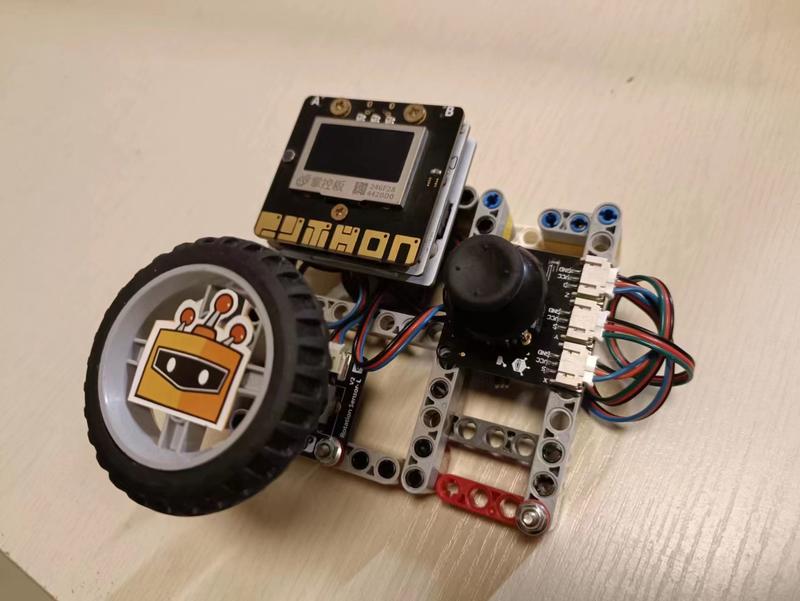 器材: 掌控板 百灵鸽 遥杆模块 角度传感器(电位器)乐高积木 探索的过程就不啰嗦了,直接说结果。 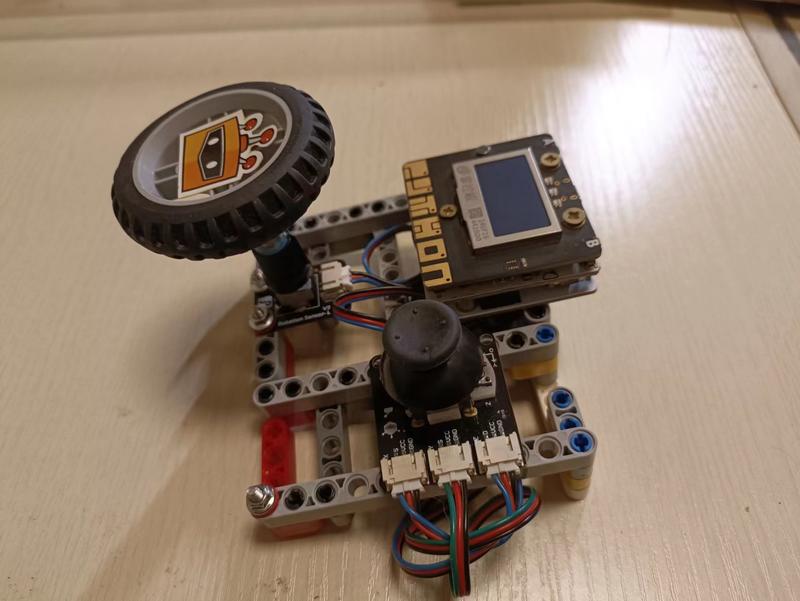 两块掌控板间用无线模式通信,速度快,延迟小。 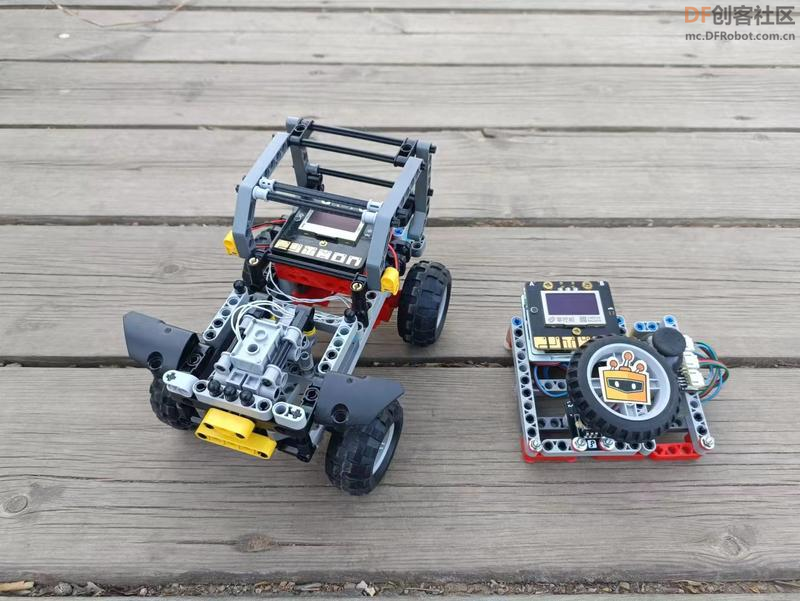 遥控器接线: 档杆-遥杆 x 接P0 y 接P1 z接P7 功能 后拉-D档-前进 前推-R档-倒车 按下-P档-停车 方向盘-电位器 接P2 功能 左右转动-调节方向 遥控端程序分析:  方向盘: 电位器接P2 读数范围0-4095,这里将它除100后取整数,得到0-40,赋值给变量y。 将数值格式转为文本格式,广播发送出去。 打印出来是方便调试,可以删去这行。  档杆: 摇杆 x 接P0 y 接P1 z接P7 摇杆的X向为模拟值 0-4095 直立状态 2000+-50 下拉 >3000 发送前进信号 a 上推 <1000 发送倒车信号 b 摇杆的Y向为模拟值 在本次程序中没有用到。 摇杆的Z向为数字值 按压为1,松开为0。 程序中按下发送P档信号 c. 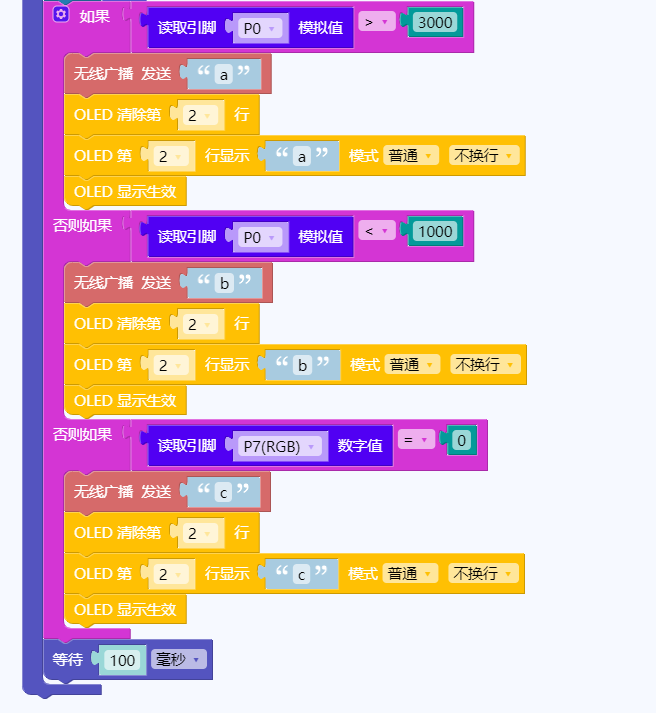 仰望小车程序分析: 运行mPython0.7.6 设置---高级设置---更换主控---乐动掌控 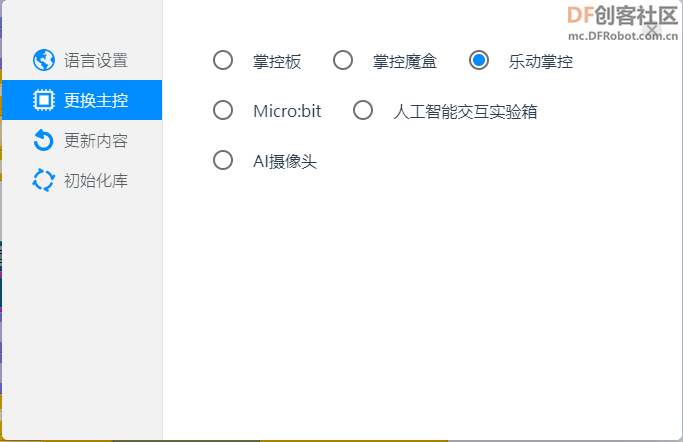 添加---执行器---电机(乐动),将左电机接入M2接口,右电机接 M1接口。  添加--执行器--舵机(乐动),舵机接P0口。  程序解读  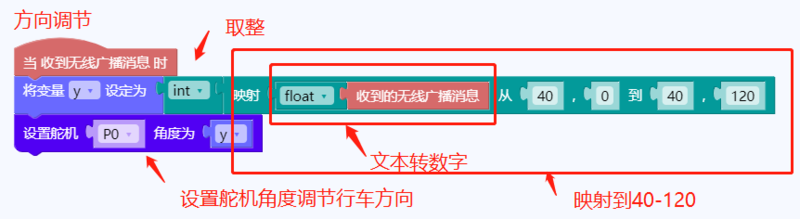  小结: 有了方向盘,遥控很好玩。 电机马力小,跑得慢不爽。  |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









