|
10302| 10
|
[M10项目] 志童道合 | 仰望--帅气的掌控“新能源”小车 |
|
本帖最后由 rzyzzxw 于 2022-12-23 21:06 编辑 男孩子的童年,有两类玩具应该是共同喜欢的,一种是车车,一种是玩具枪。 在陪孩子玩创客的过程中,我们玩过不少小车,从小宝贝时的手拉车、惯性车,到大一点时的遥控车,再下来乐高拼搭的小车,买的创客类编程的小车,自己搭的创客编程小车,最高级的是大疆机甲战车。 创客类的小车大多是三轮的,前面一个万向轮,玩起来挺好的,不过能有方向舵可以遥控调整方向的可编程创客小车还没有遇到,所以我们总有一个心愿,自己做一辆有方向舵的编程小车。 …… 许多年过去了,总没有实现,可以这个想法并没有丢啊,一直静静藏的在心中的一个角落。 序幕: 志童道合 | 做一个用行空板遥控的掌控小车车 (出处: DF创客社区 - 分享创造的喜悦) https://mc.dfrobot.com.cn/thread-314778-1-1.html?fromuid=727937 (出处: DF创客社区 - 分享创造的喜悦) 志童道合 | 行空遥控的掌控“新能源车” https://mc.dfrobot.com.cn/thread-314811-1-1.html?fromuid=727937 (出处: DF创客社区 - 分享创造的喜悦) 童年的玩车梦还在继续……  第一集: 2022.12.2 比亚迪发布了11月销量。  做为一名迪粉,我很开心。 所以我也要发布新搭建的掌控新能源小车,借用比亚迪的高端车系名字,我也叫它--仰望。 上一版掌控四轮小车(11.30)做完后,有许多不满意的:部分地方用了胶枪和扎带固定,积木颜色过多,花花绿绿不够沉稳,所以(12.1)立马开始做第二版,目标是全部用乐高积木,颜色以灰色为主色调。 【器材准备】 各种乐高积木 乐动舵机 乐动电机 乐动掌控 遥控器用行空板(行空自带热点和SIOT太香) 【编程软件】 行空板 mind+ 掌控板 mPython 我甚至觉得,labplus公司可以仿照我的设计出个四轮小车的套件,记得给我署名权哦。 step 1 搞定转向机构 转向机构用的是平行四边形的不稳定性,如下图:  因为要变形,四角连接和后面加固都用光销。 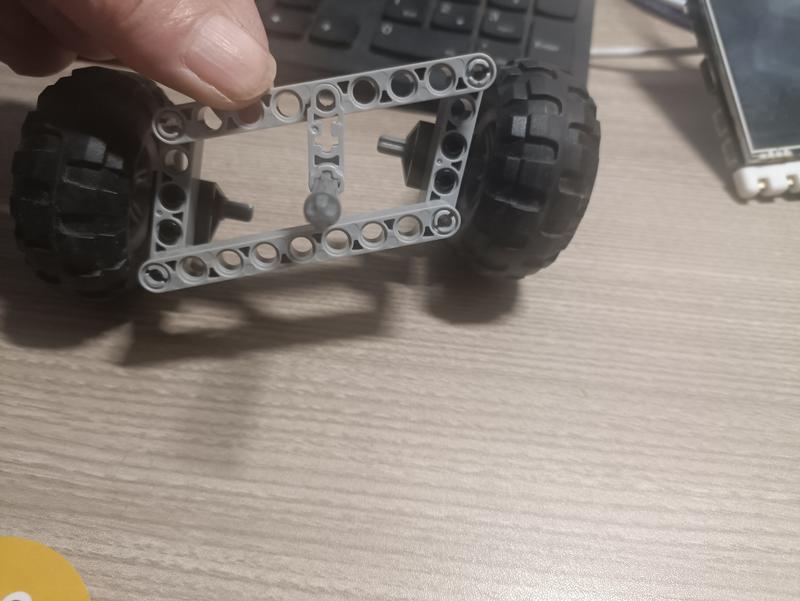 上图中插轴的地方将来用来插乐高舵机的轴,舵机固定在下面的9孔梁上。 最费脑筋的仍然是方向舵机的安装,因为它和下面的固定梁有半个孔的差距,上一版中就因为没有找到办法动用了胶枪。 这次费了好大的劲,加上手里的乐高积木种类够多,终于比较完美的解决了舵机固定的问题。 车轮的固定也找到了合适的零件,轻松搞定。 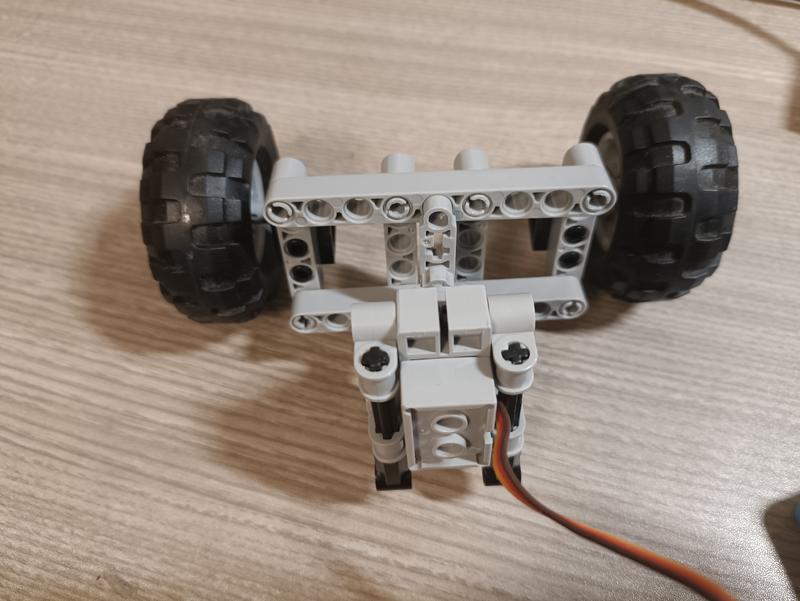   上电测试,这个舵机不是盛思官方的,后面我对它进行了拆解,换了接头,而换的接头也是不兼容的,只是线距一致,我又拆开了乐动掌控,用小刀削除了影响我改装接头的部分(为这个帖子这个乐动掌控付出了“巨大”的代价)。  完成了这一步,后面就轻松多了。 step 2 车架与电机组装  电机也不是官方的,后面换了两个接口正确的。 因为下来的搭建比较轻松,竟然没有拍照,从视频中截一张车架图吧。 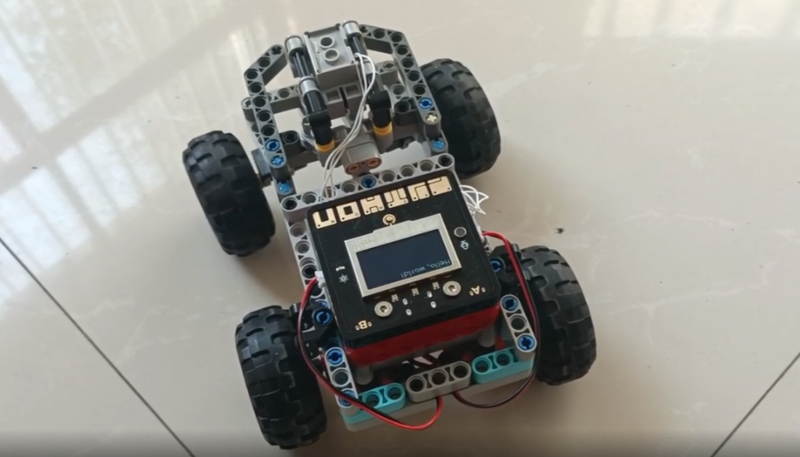 下面进入半成品测试环节。 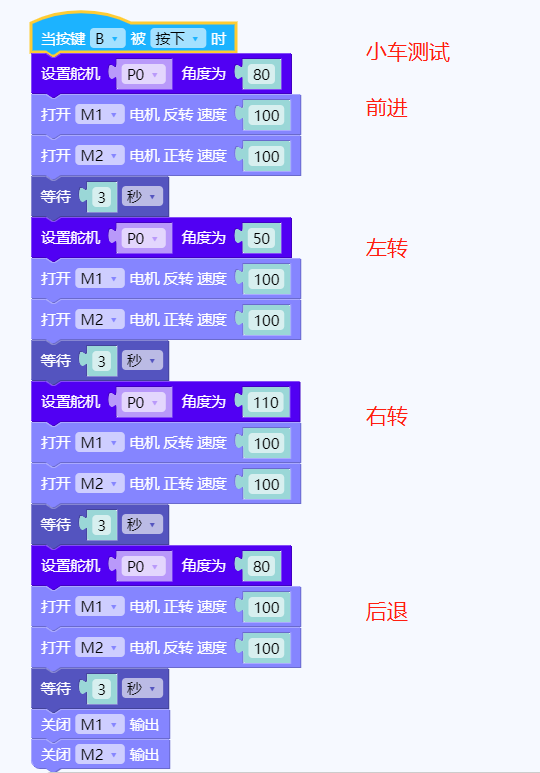 step 3 整车美化     后面的故事就简单了。 第二集:  我们的仰望SUV搭好后,就准备开心的玩起来了。 【目标任务】 用行空板做遥控器,用触摸屏触摸按钮来控制仰望小车的运动。 【器材准备】 仰望SUV 行空板 【软件准备】 行空板 mind+ 乐动掌控 mPython step 1 我们约定: 1、开启行空板板载热点,掌控板接入热点。 2、运行行空板上的SIOT,行空和掌控订阅相同的5个主题进行消息传递。 检查SIoT是否开启 长按行空板的“Home”键进入菜单页,点击“应用开关”,检查SIoT服务是否开启,如果显示“已禁用”,点击SIoT选项,切换SIoT状态为“已启用”。 具体操作如图所示: 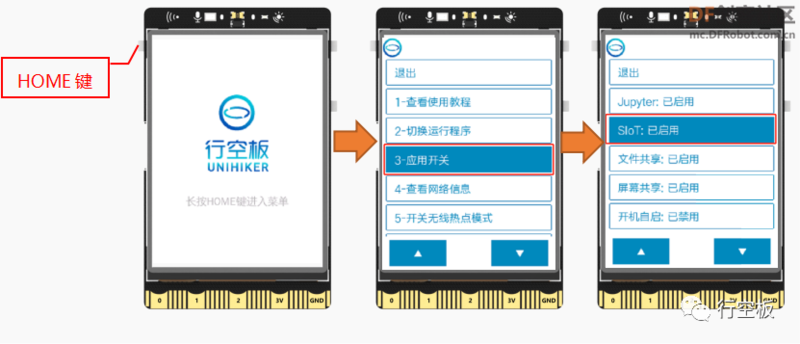 和掌控板联机测试时要先启用行空板热点。 行空板开启热点,默认IP为193.168.123.1。  先给仰望编程: 【提示】使用时要先开启行空板载热点,后开掌控板,掌控板方可通过热点与行空连接。 运行mPython0.7.6 设置---高级设置---更换主控---乐动掌控 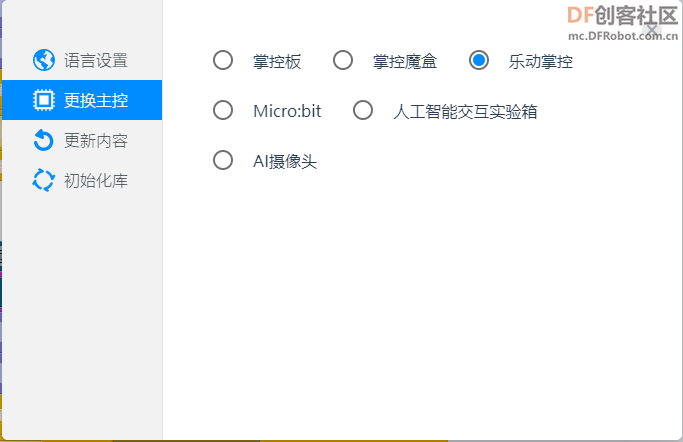 添加---执行器---电机(乐动),将左电机接入M2接口,右电机接 M1接口。  添加--执行器--舵机(乐动),舵机接P0口。 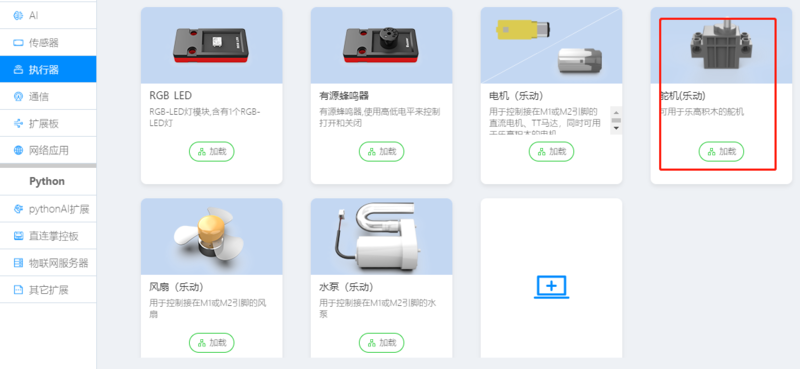 程序如下:  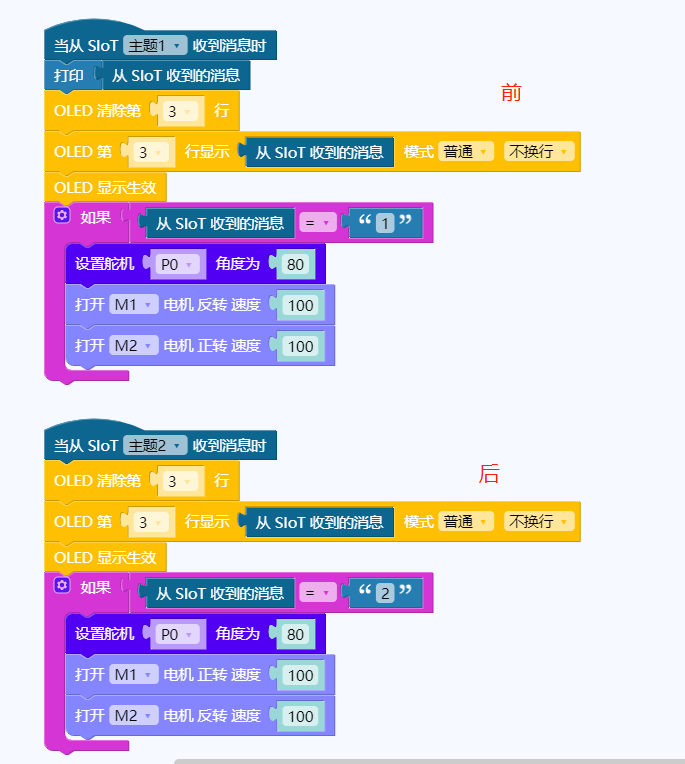 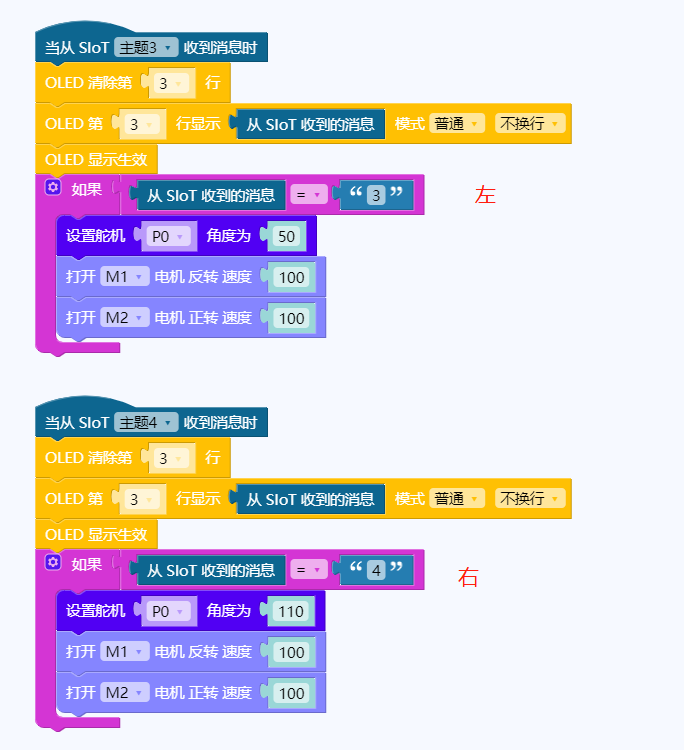  step 2 行空板编程 【提示】使用时要先开启行空板载热点,后开掌控板,掌控板方可通过热点与行空连接及接入SIOT。    step 3 开机测试 【提示】使用时要先开启行空板载热点,后开掌控板,掌控板方可通过热点与行空连接及接入SIOT。  第三集: 继续尝试对仰望小车的遥控。 【目标任务】 用行空板+摇杆模块进行遥控。 【器材准备】 仰望小车 行空板 摇杆模块 【软件准备】 行空板 mind+ 乐动掌控 mPython step1 行空板+摇杆测试 认识摇杆模块:  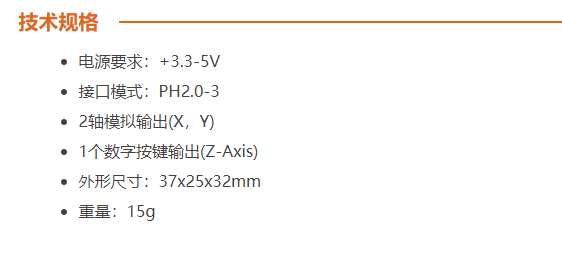 我将X接入行空板P21引脚,y接入P22引脚,Z接入P23引脚,编写如下程序测试读数。 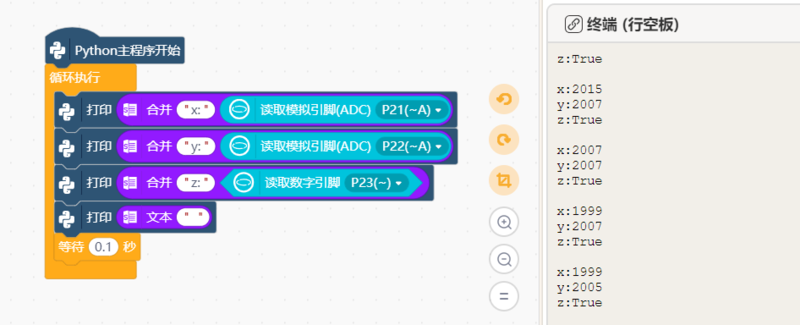 X Y的在中间位置时读数约为2000+-50,模拟值范围0-4095。向模块上所示箭头方向推动时由小变大,反向由大变小。 Z为数字按钮,按下为False ,不按为True。 搞清楚这些,就可以写程序了。 我们约定: 1、开启行空板板载热点,掌控板接入热点。  2、运行行空板上的SIOT,行空和掌控订阅相同的5个主题进行消息传递。 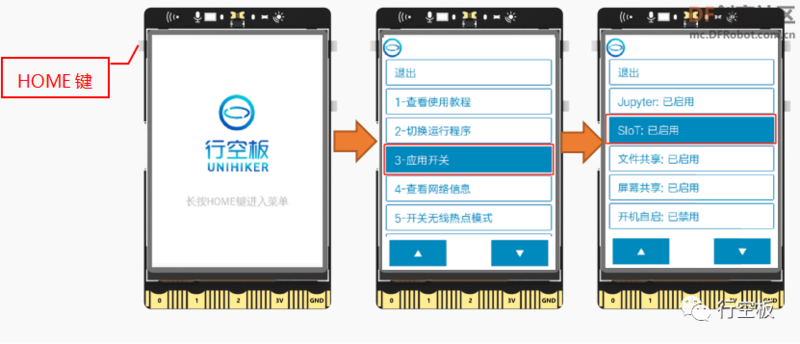 行空摇杆遥控器 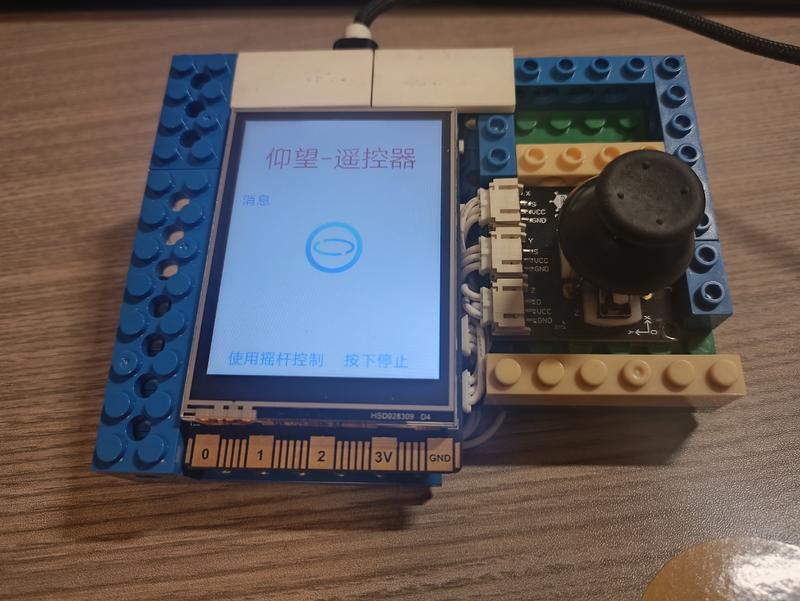 行空程序: 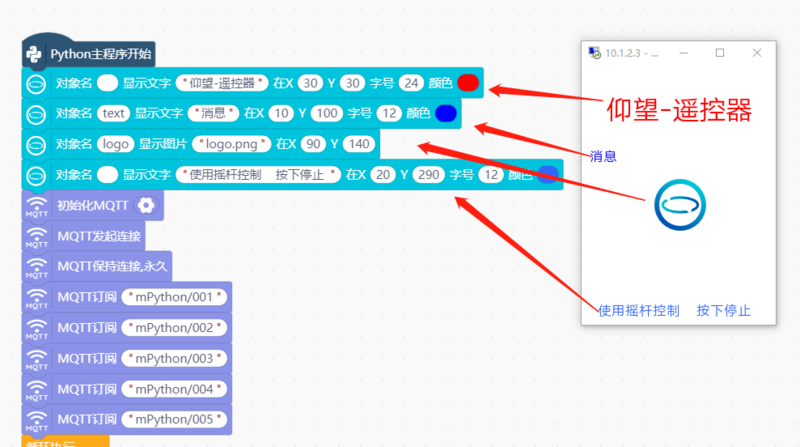  上面的测试直接在行空板上都可以完成的。太香了。 step 2 仰望-乐动小车编程 (还是上个帖子的程序) 【提示】使用时要先开启行空板载热点,后开掌控板,掌控板方可通过热点与行空连接。 运行mPython0.7.6 设置---高级设置---更换主控---乐动掌控  添加---执行器---电机(乐动),将左电机接入M2接口,右电机接 M1接口。  添加--执行器--舵机(乐动),舵机接P0口。  程序如下: 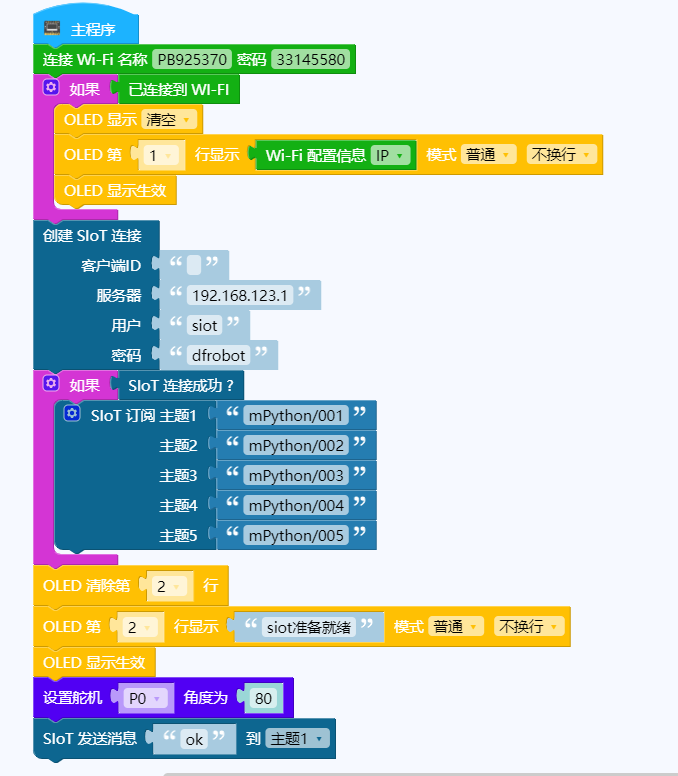 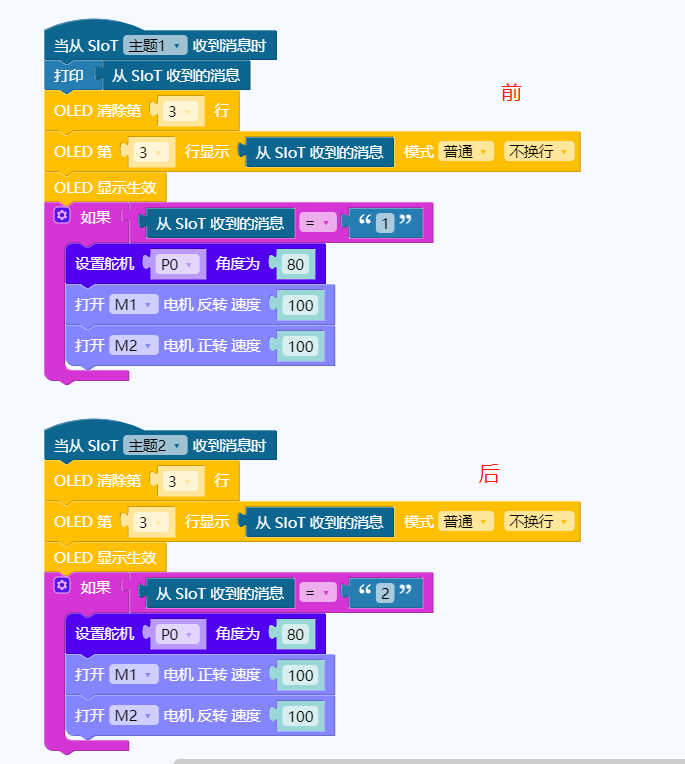   step 3 联机测试 【提示】使用时要先开启行空板载热点,后开掌控板,掌控板方可通过热点与行空连接及接入SIOT。  【任务小结】 用摇杆的感觉还是爽啊,不用看屏幕,上上下下,左左右右,向下按就停。 第四集: 继续来玩仰望小车。 【目标任务】 用百灵鸽+摇杆,用掌控无线广播方式来控制仰望小车。 【器材准备】 百灵鸽 摇杆 仰望小车 【软件准备】 mPython0.7.6 step 1 组装遥控器 x 接P0 y 接P1 z 接P2  测试,读取摇杆数据: 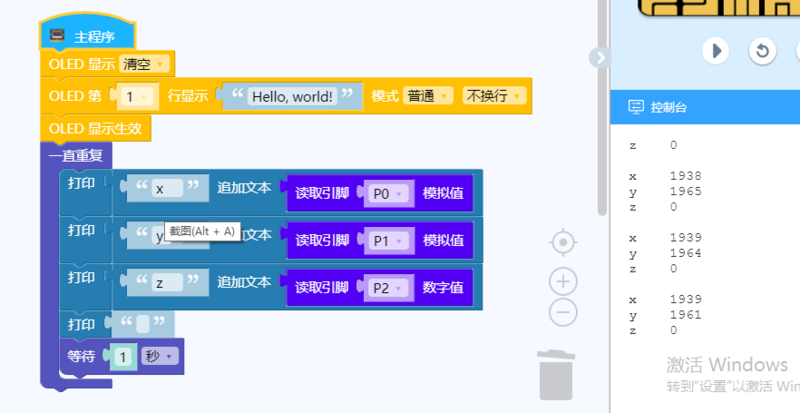 x/y模拟值 范围 0-4095 常态下读数2000+-100 z 数字按钮 常态0,按下1 下面可以编程了:  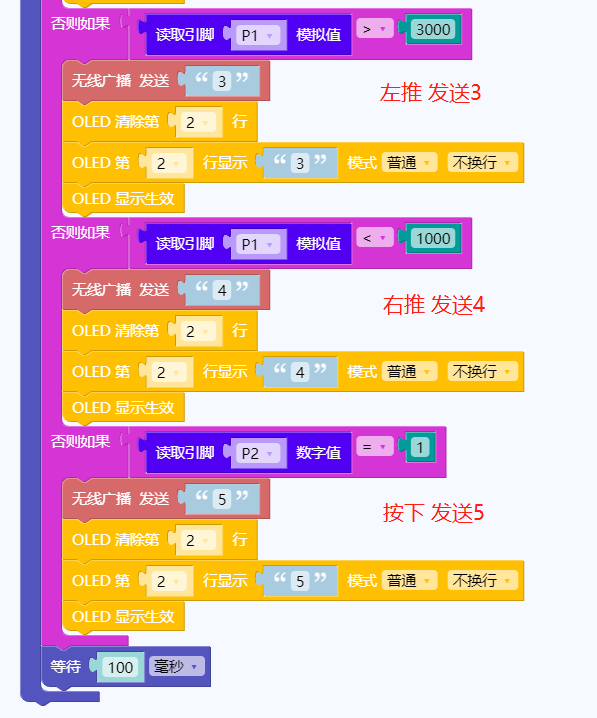 step 2 仰望乐动小车编程 主控选择乐动掌控 扩展--添加--乐动电机和乐动舵机 程序 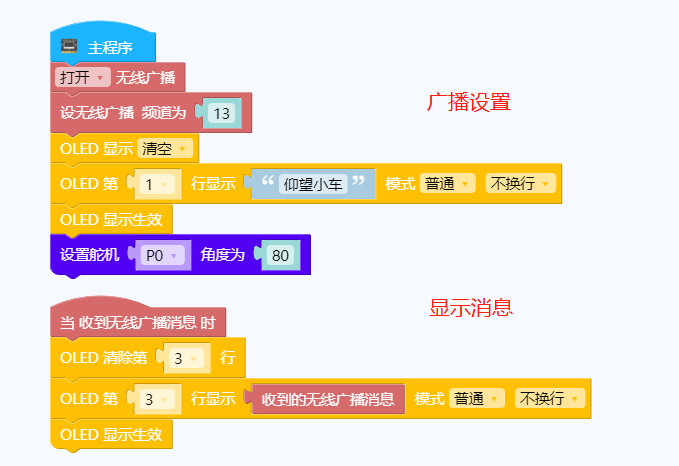  step 3测试  【全剧终】  行空SIOT 仰望小车.rar百灵鸽广播 仰望小车.rar 行空SIOT 仰望小车.rar百灵鸽广播 仰望小车.rar |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









