|
16431| 9
|
[项目] 3D 打印的树莓派蜘蛛机器人 |

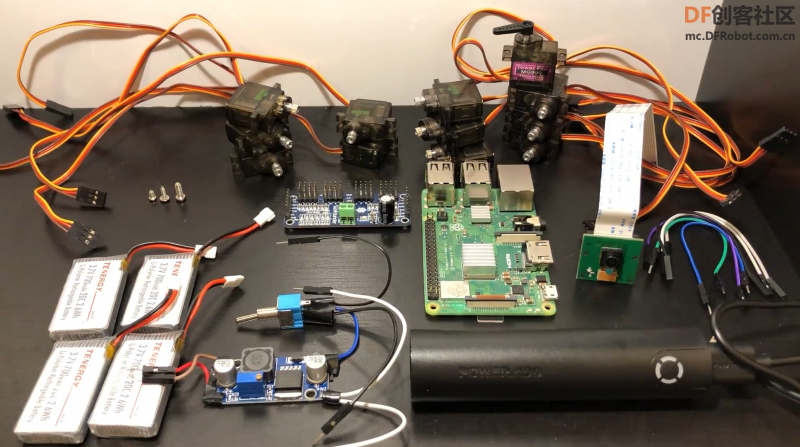
 这个四足蜘蛛机器人以树莓派作为「大脑」,身躯和四肢由 3D 打印。无需定制电路板,初学者即可完成组装。不仅如此,教程还包含一段将近一个小时的组装视频。这对于想了解树莓派、Python 编程的朋友来说是非常不错的上手项目。 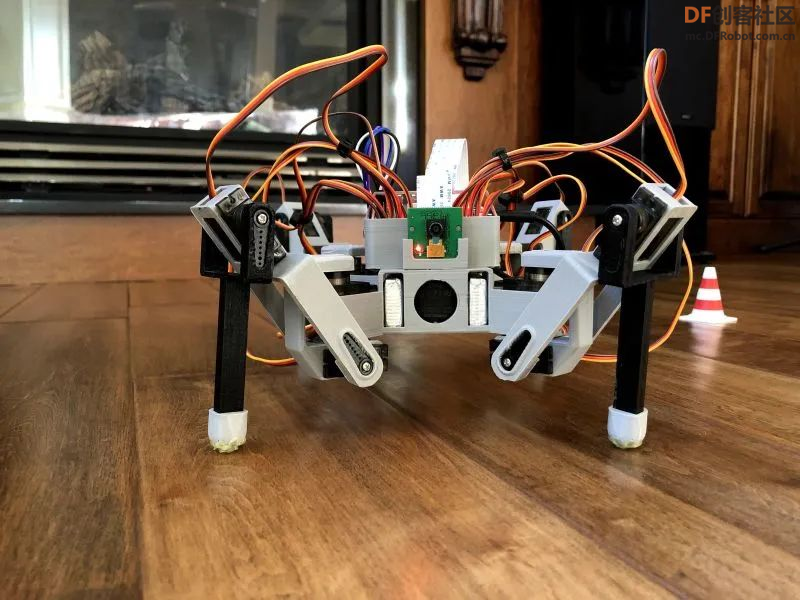 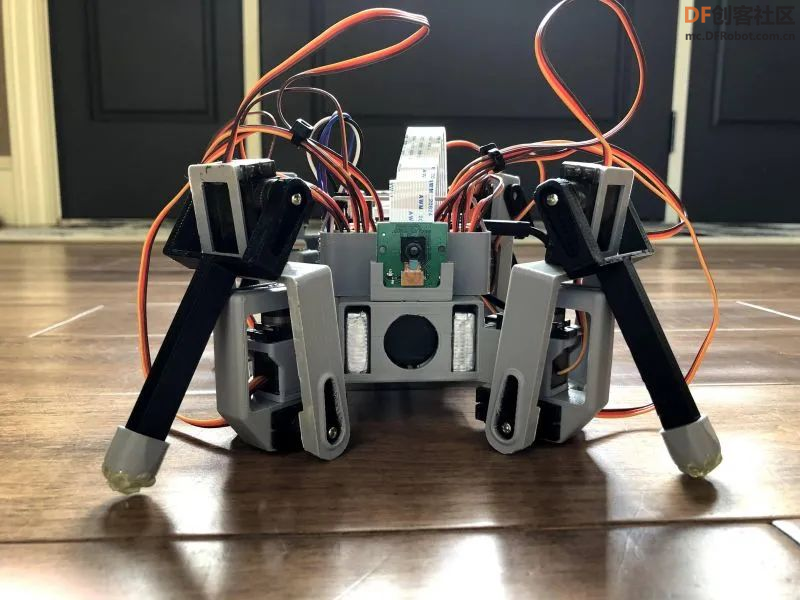 组件清单
 3D 打印组件 需要打印的零件清单:
每条腿由三个部分组成:关节、大腿、小腿。为了便于组装,STL 文件都做了命名和编号。可在文末下载。 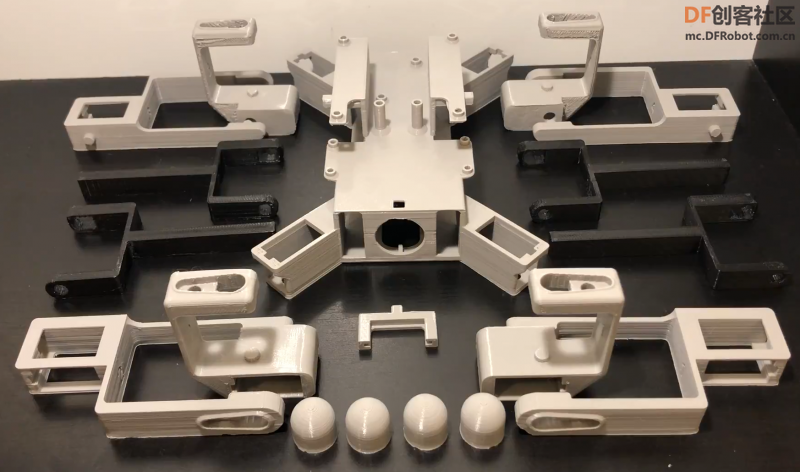 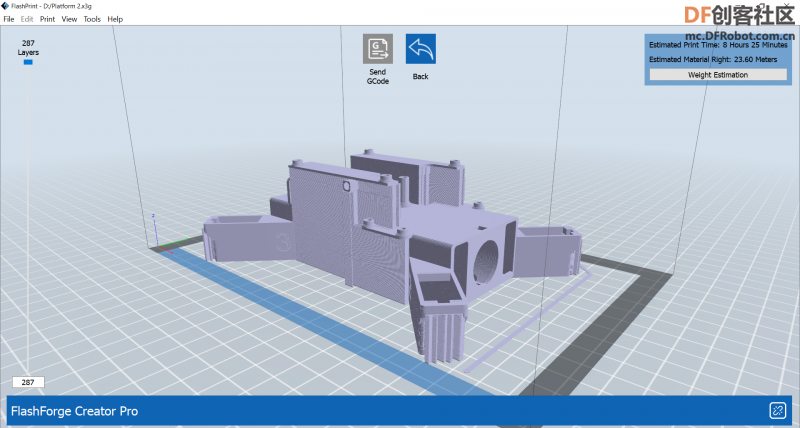 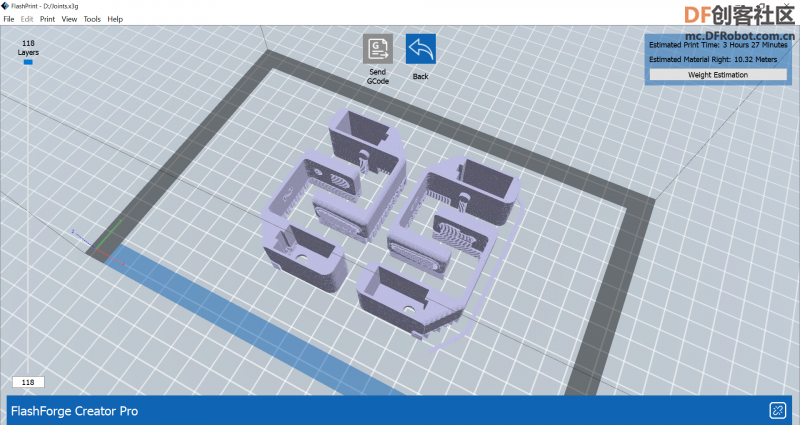 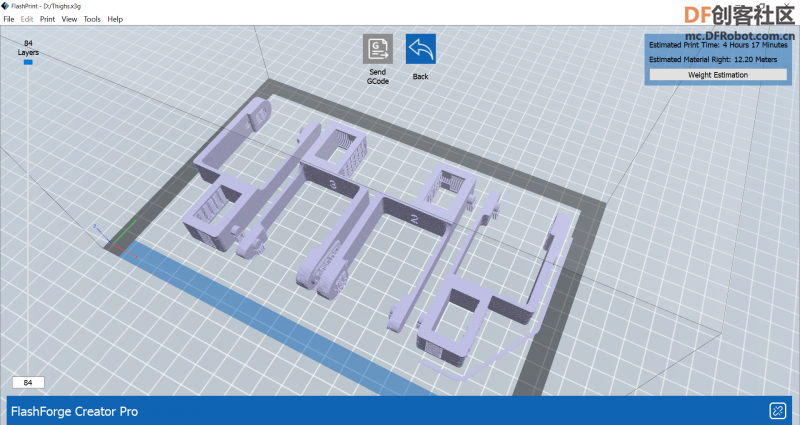 使用 PLA 材料,3D 打印所有的文件。你可以一次打印所有关节的零件,大腿和小腿也可以一起打印,如图所示。而打印身体、关节、大腿、摄像头支架在打印时需要支撑。 安装树莓派  推荐使用 2GB 内存以上的树莓派 + Raspberry Pi OS 桌面版。为树莓派安装好系统,参考:https://shumeipai.nxez.com/2019/04/17/write-pi-sd-card-image-using-etcher-on-windows-linux-mac.html 通过配置 WiFi,让树莓派接入网络,参考:https://shumeipai.nxez.com/2017/09/13/raspberry-pi-network-configuration-before-boot.html 开启 SSH,使用 PuTTY 登录树莓派终端。传输文件和电影可以通过 SFTP,使用 FileZilla 即可。 开启 VNC 并使用 VNC Viewer 来登录树莓派,参考:https://shumeipai.nxez.com/2018/08/31/raspberry-pi-vnc-viewer-configuration-tutorial.html 组装机器人 组装全过程视频。(视频长 51 分钟,请酌情切换到 WIFI 下观看) 特别说明: 1、某些零件可能需要进行打磨才可以装配在一起。你不一定完全依照视频中的步骤组装,不过建议先测试好电路部分,测试好之后再组装 3D 零件。 2、每个伺服电机的接线图和表格下面有提供。 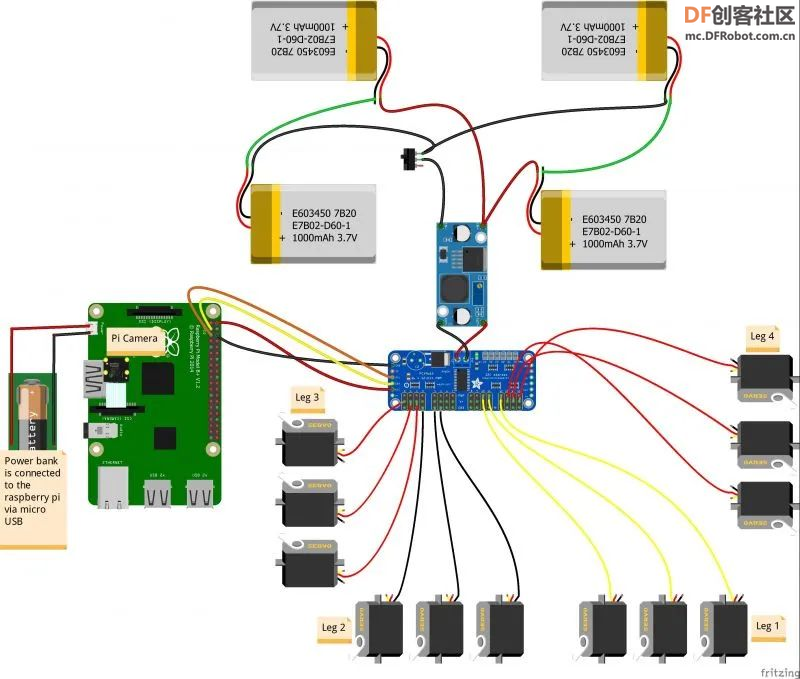 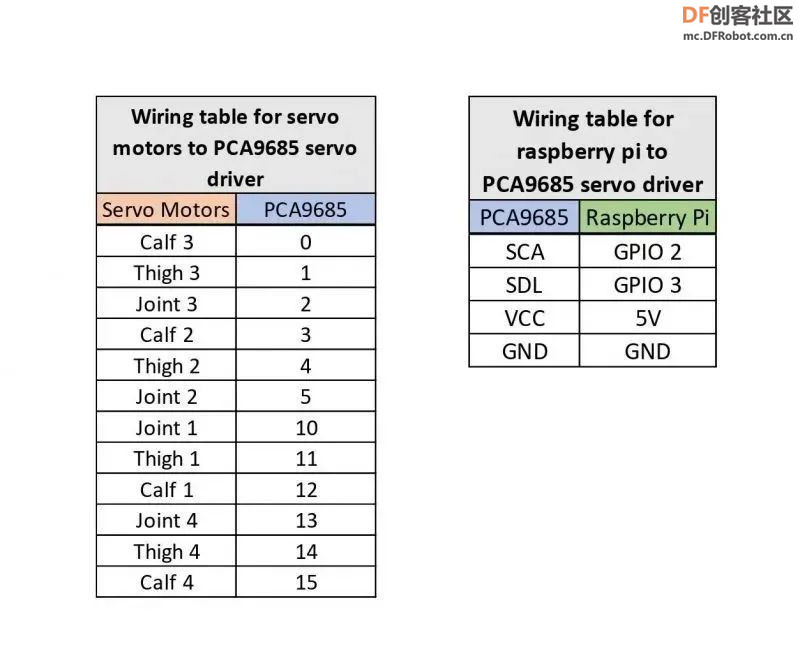 3、如果你对 4 节锂电池的连接感兴趣,这里说明一下。这是一组两节 3.7V 锂电池,串联成 7.4V 电池组。通过另一组同样的并联,每个锂电池 700mAh,最终成为 7.4V 1400mAh 电池组。串联增加电压,并联扩充容量。机器人上有两块电源,锂电池组给伺服电机供电,移动电源独立为树莓派供电。 下面是用到的软件和命令:WinSCP: https://winscp.net/eng/download.phpAdafruit_Python_PCA9685 模块: Pygame 模块: 程序源文件可在文末下载。 完成 参考视频操作下来,就可以完成组装了。希望你可以从中学到东西,体验到乐趣!  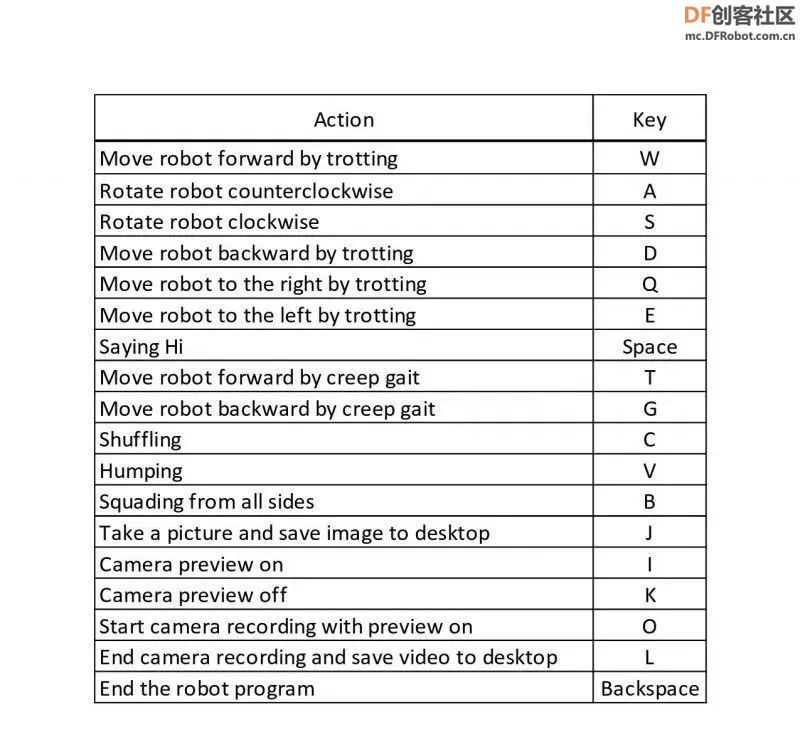 你可以在此机器人平台上做一些有趣的扩展、升级。例如增加一个 HC-SR04 超声波传感器,在本项目的文件库中已经提供了相应的 STL 文件。通过编程即可实现让机器人自主行走,绕开障碍物。 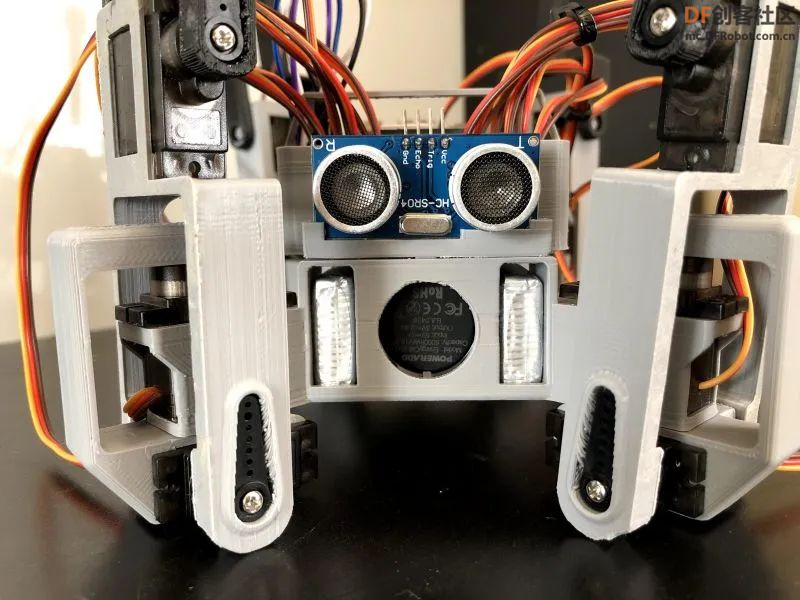 通过加装 MPU-6050 传感器,还可以让机器人实现自平衡。引入 OpenCV 让机器人具有计算机视觉功能…… 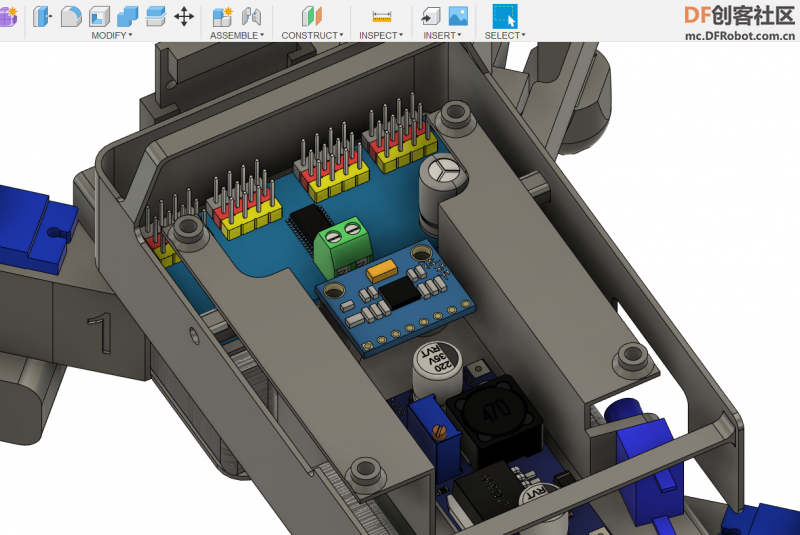 尽情发挥你的想象力吧! 原文作者:Morrisl4 原文链接:instructables.com/id/3D-Printed-Raspberry-Pi-Spider-Robot-Platform/ 译文首发于:趣无尽 转载请注明来源信息 |

1.09 MB, 下载次数: 6969



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 悔悟卡
悔悟卡 匿名卡
匿名卡

 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






