|
17407| 1
|
用树莓派Pico做一个钢铁侠反应炉 |
|
在上一篇教程中,我们曾经介绍过用ESP32来制作一个钢铁侠反应炉时钟——自制一个钢铁侠反应炉时钟 这期我们带来一个树莓派Pico的版本。  项目将使用一条 LED 灯带和一些技巧,造出一个具有 3D 无限镜面效果的反应炉。  工作原理 在本教程中,我们将使用树莓派 Pico 来控制 31 个单独可寻址的 LED 灯,它们安装在两片亚克力塑料圆盘之间。其中一片圆盘上涂有胶粘镜片,另一片圆盘上贴有单向镜膜;这样可以给 LED 灯带制造出 3D 无限效果。不过,树莓派目前还没有自己的"等离子聚变能源",所以我们还得用充电电池,然后把所有东西封装在一个 3D 打印的外壳中。 需要的材料
在初始设置过程中,你还需要:一台电脑,一根 Micro USB 线和焊接设备和材料(本项目中的焊接量很少,所以如果你不擅长或者不会焊接,也不用担心)。 安装固件 树莓派为树莓派 Pico 提供了详细的文档,不过在这一步,非常简单,我们只需要拖动固件到Pico上就行(就像把文件拷贝到 U 盘上一样)。 在你的计算机上,从这里:https://micropython.org/download/rp2-pico/ 下载适用于最新版本 Pico MicroPython 固件的 UF2 文件。MicroPython 是一种针对微控制器优化的 Python 实现,适合各种水平的程序员。 如果你的 Pico 还没有显示为 RPI-RP2 驱动器,你需要检查一下你的电脑是否已正确安装了 Pico 的驱动程序。你可以按住 Pico 上的 BOOTSEL 按钮(位于 USB 插口旁边的小按钮),同时将连接了 Pico 的 Micro USB 插入到电脑上来将 Pico 设置为启动器模式。然后,Pico 将会显示为一个名为 RPI-RP2 的驱动器,如下所示(以 macOS 为例): 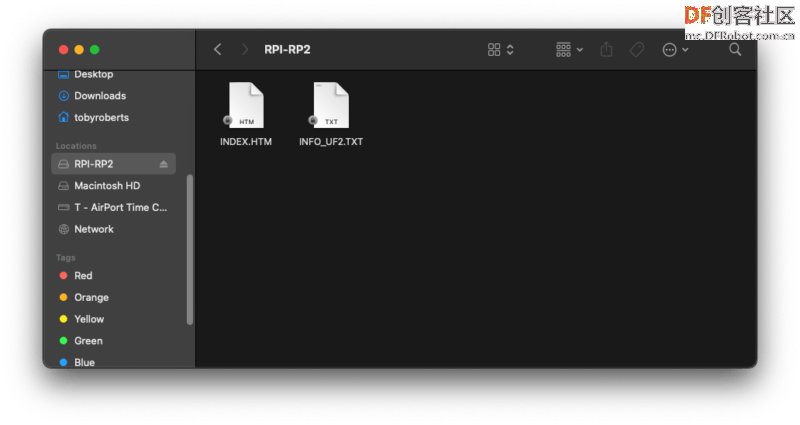 找到刚刚下载的 .uf2 固件文件,并将其拖放到 RPI-RP2 驱动器中,或者直接复制粘贴。接下来,Pico 将自动重新启动。完成这个步骤后,当 Pico 连接时,它将不会再显示为一个驱动器,但会保持连接。好了,你已经成功刷写了固件。 给Pico编程 下载、安装并打开一个名为 Thonny 的 Python 集成开发环境(IDE)。后面我们会用这个给Pico编程。确认 Pico 仍然连接着,并且 Thonny 的界面应该是这样的:  如果你在 Shell 窗口中看到 >>>,那么你已经成功连接到 Pico 并启用了交互式会话,准备开始编程。如果你没有看到这个提示,那么你需要检查 Thonny 的设置是否正确。点击 Thonny 窗口的右下角,确保选择了 MicroPython(Raspberry Pi Pico)解释器;如果没有选择,请选择它。如果由于某种原因没有成功地刷写固件,Thonny 可能会提示你在这个阶段安装它;在这种情况下,尝试重新刷写固件。如果Pico 仍然没有显示为连接状态,那需要断开连接并重新连接,然后按下 Thonny 顶部菜单栏的红色停止标志来重置一下。然后,你应该就可以在 Shell 窗口中看到 >>> 提示了,说明我们已经连接成功。 将以下代码复制粘贴到空白且尚未保存的 Thonny 程序窗口中: Thonny 的界面现在看起来是这样的: 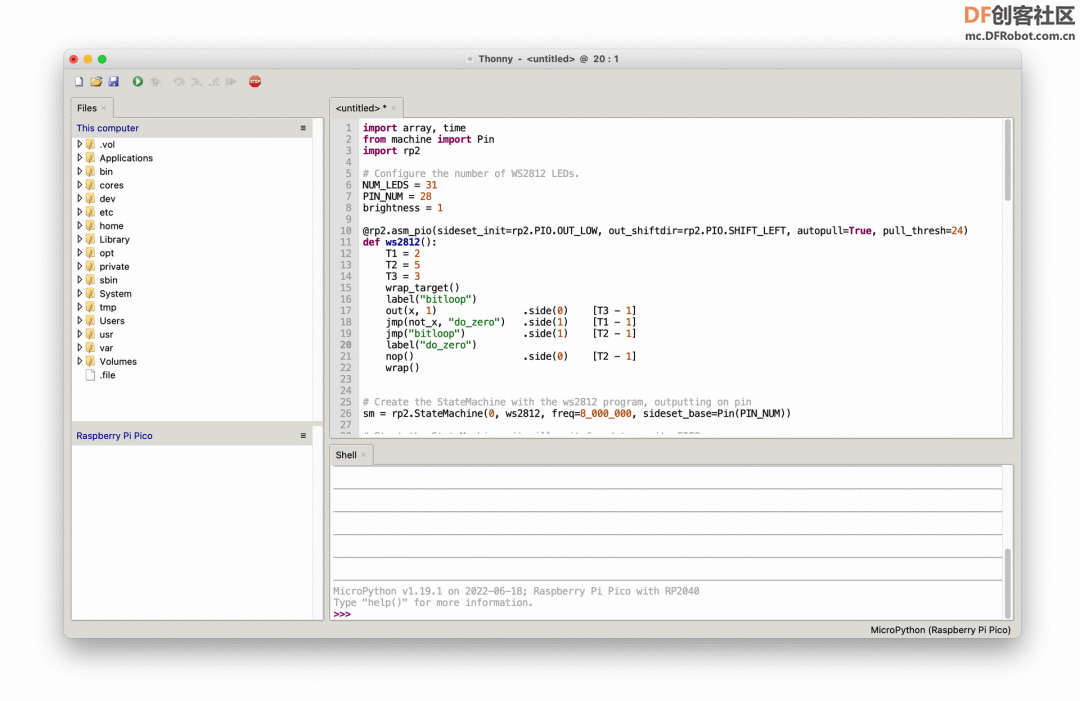 使用 MicroPython 的一个优点是它的很多代码都是用可读性强的英语编写的。比如,在这个程序的开头,我们可以看到 Pico 将通过引脚 28 控制 31 个 LED,以最大亮度显示(亮度为 0-1 的比例,其中 0.5 表示 50% 的亮度)。这个程序的剩余部分会指示 Pico 重复显示图案和颜色。 点击 File 然后选择 Save as... 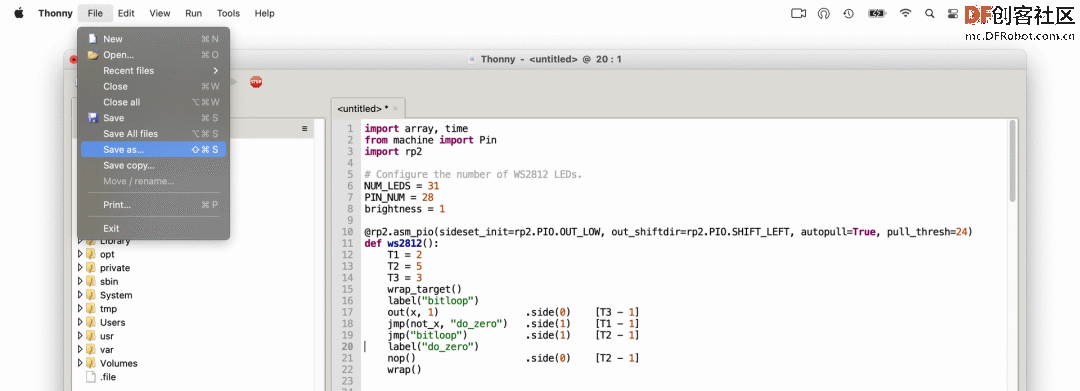 弹窗将询问你想要将文件保存在哪里: 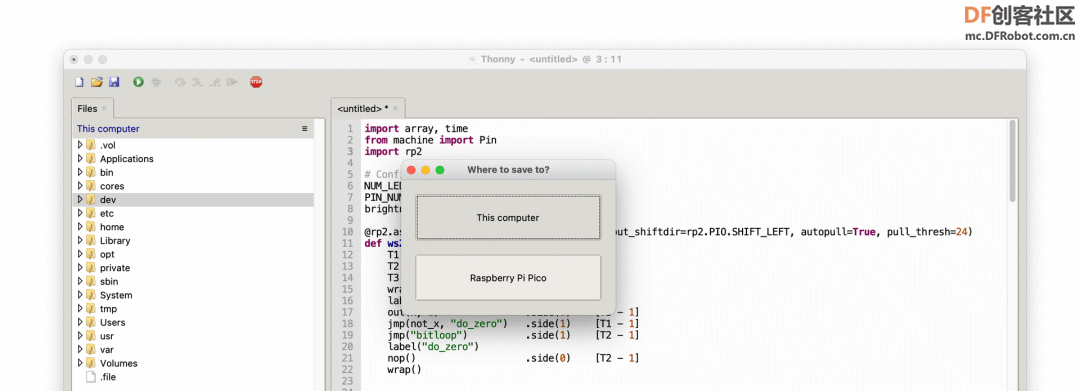 点击 Raspberry Pi Pico 并将文件命名为 main.py: 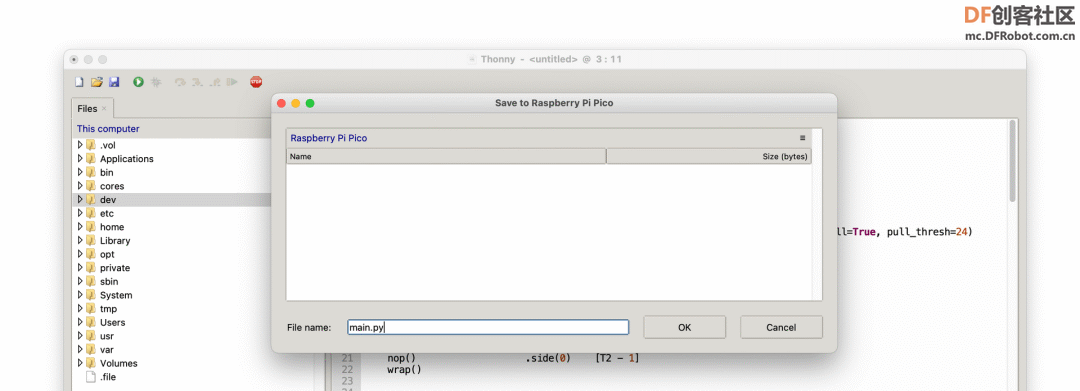 注意一定要将文件命名为 main.py,因为任何使用这个名称的文件都将在每次启动 Pico 时自动运行。 组装硬件3D 打印的部件 需要四个 3D 打印的零件来容纳所有的组件:背板、主体、Pico 支架和前盖。我们只需要将它们粘在一起组装成完整的装置就行。 你可以在文末免费下载这些 3D 打印文件。建议使用易于打印的材料,比如 PLA 或 PETG 塑料丝材料来打印。  切割和准备亚克力圆盘 对于这个项目,我们需要两块厚度为 3mm,直径为 70mm 的亚克力圆盘,其中一块圆盘需要在中央钻一个直径约为 5mm 的孔,用于通过导线。 如果你可以使用激光切割机,制作这些部件很简单。或者你可以找出你的旧文具盒,找到圆规。使用木工锯切割出一个直径为 70mm 的圆形,然后用砂纸或锉刀修整边缘。最终的圆盘不需要完全无瑕疵,因为后续的步骤会遮盖这些小瑕疵。其中一块圆盘在中心钻一个直径为 5mm 的孔,用于以后通过导线。  在柔性粘性镜片上标记一个70mm的圆,在单向镜自粘膜上标记另一个同样大的圆。使用剪刀剪裁出圆形,而且可以剪得非常圆。确保从亚克力圆片上撕掉了所有的保护层,然后依次撕掉镜片背面的粘性支撑层。把镜片贴到带有孔的圆片上,这个圆片会被用于安装我们的Pico,然后将一片单向镜膜贴到另一个圆片上。 布线和焊接电子器件 反应炉底部将会包含可充电电池、开关和 USB-C 充电板,这些我们需要将它们粘合到 3D 打印切割件内部的适配插槽中。 在这个阶段,我们需要进行一些电线的剪切、剥离和焊接工作。根据下面的照片,确保将电池的正负极线连接到正确的 USB-C 充电板正负极输入上,并将板的正输出线焊接到滑动开关的中间引脚上。开关的正极线可以焊接到两个外侧开关引脚的任意一个上: 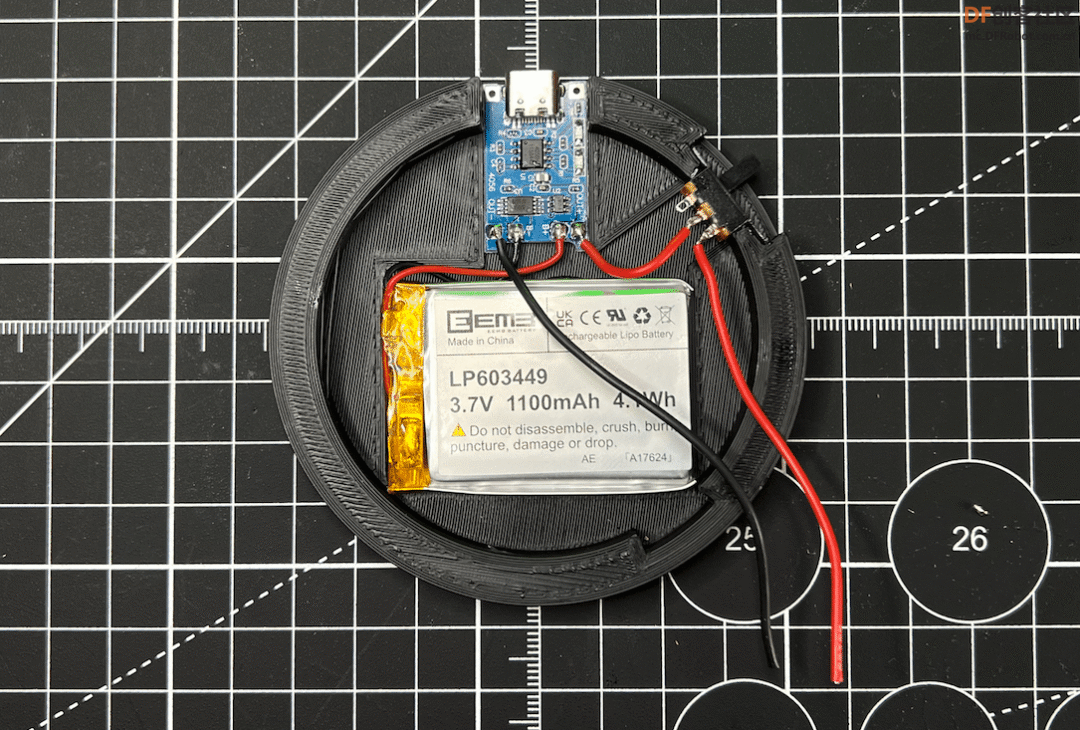 接下来,将另外三根导线直接焊接到 Pico 的背面。这些导线的长度应该足够完成后面组装过程中的连线电路:大约 20cm 的长度应该足够了。为了给 Pico 提供电源,还需要将红色和黑色导线分别连接到标有 VBUS 和 GND 的引脚上。我们需要第三根导线(蓝色),在上面的照片中显示,在蓝色导线上将它焊接到标有 GP28 的引脚上。我们的 MicroPython 脚本中指定的是 Pico 用来与 LED 进行通信的引脚: 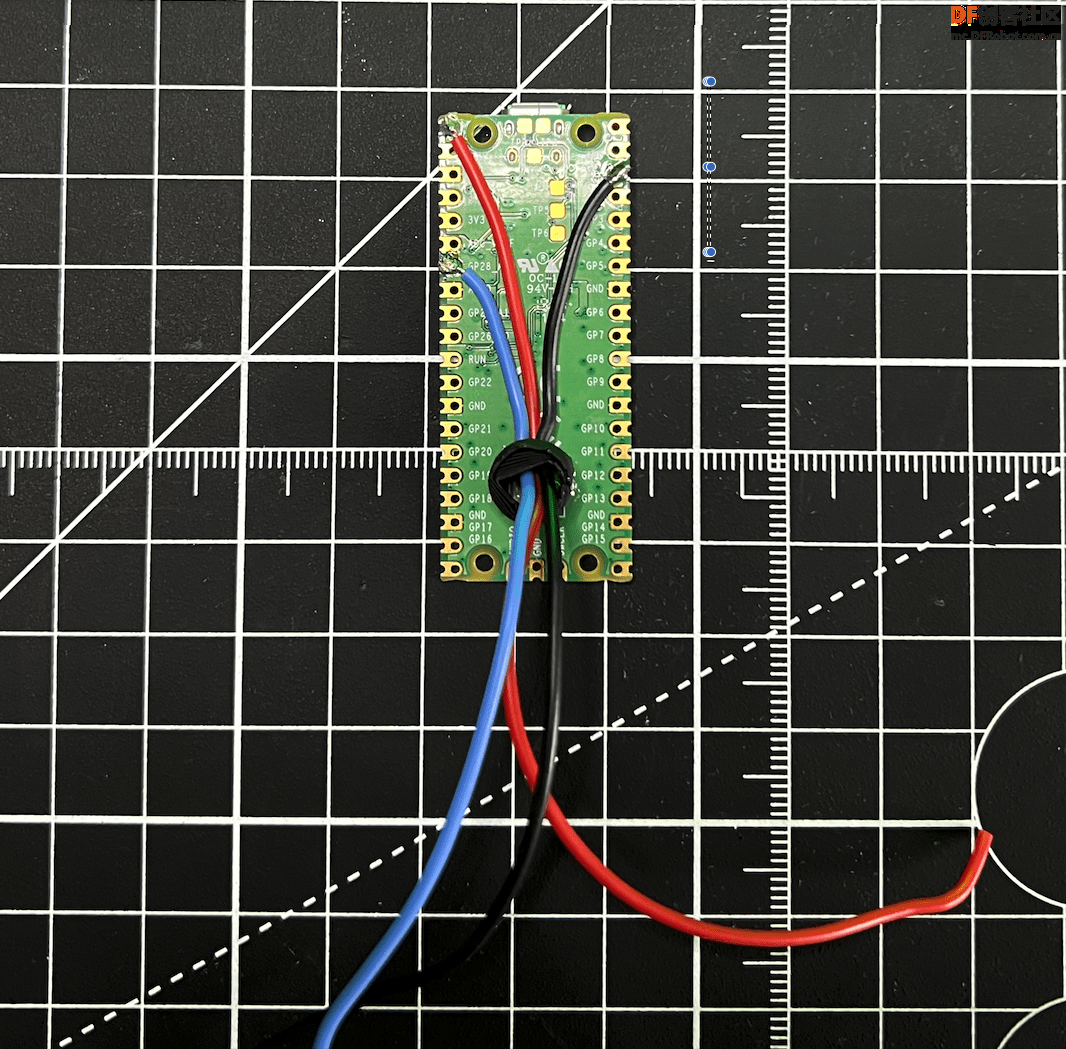 LED 灯带通常已经预先布线,但它们的连接点通常较大,我们需要自制一个布线束。使用剪刀,将任何现有的布线都剪掉,然后切割出一条 31 个 LED 的灯带,确保剪切沿每个 LED 之间的缝隙进行: 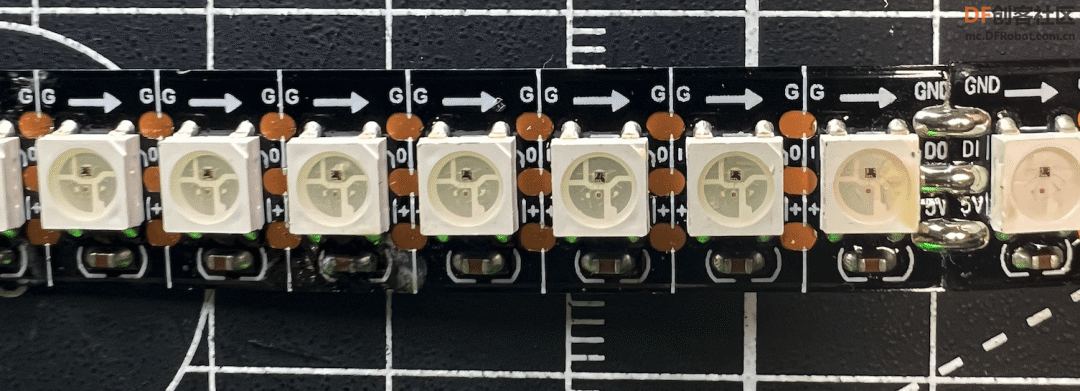 灯带上也标有箭头,用于显示正确的电流方向,"+"符号代表正线,"0"代表数据线,"G"代表负线或接地线。在切割时,确保沿着每个焊盘中间切开;如果不小心的话,很容易导致焊接线接触不良。 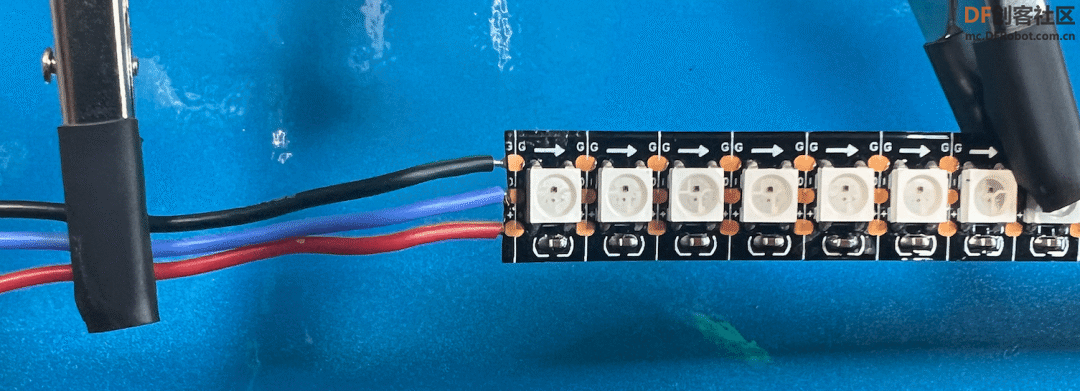 在上面的照片中,像这样焊接另外三根导线,长度也约为 20cm:红色正线、蓝色数据线和黑色地线。在焊接到焊盘时,你可能会发现从灯带后面进行焊接会更方便一些。 组装 将连接到你的树莓派Pico的三根线穿过小型3D打印的Pico底座。然后将线通过镜子圆板的孔,将底座粘在你的Pico底部和圆板的反光面。确保Pico在底座上坐立于镜子表面之上。 这样,我们就可以实现我们的目标,获得一个 3D 无限效果:  现在将带单向膜的圆盘放入 3D 打印的主体中,并将前环粘合到主体上。由于圆盘是由前环固定的,所以可以隐藏一些形状方面的细微缺陷。 将 31 个 LED 的灯带粘贴在 3D 打印的主体的内部,确保布线和连接与主体的间隙对齐,这样你可以轻松地将导线穿过安装 Pico 的圆盘的一侧。大多数 LED 灯带都有自粘背面,这有助于使这个过程变得简单。参考下面的图示,查看所有组件如何组装在一起: 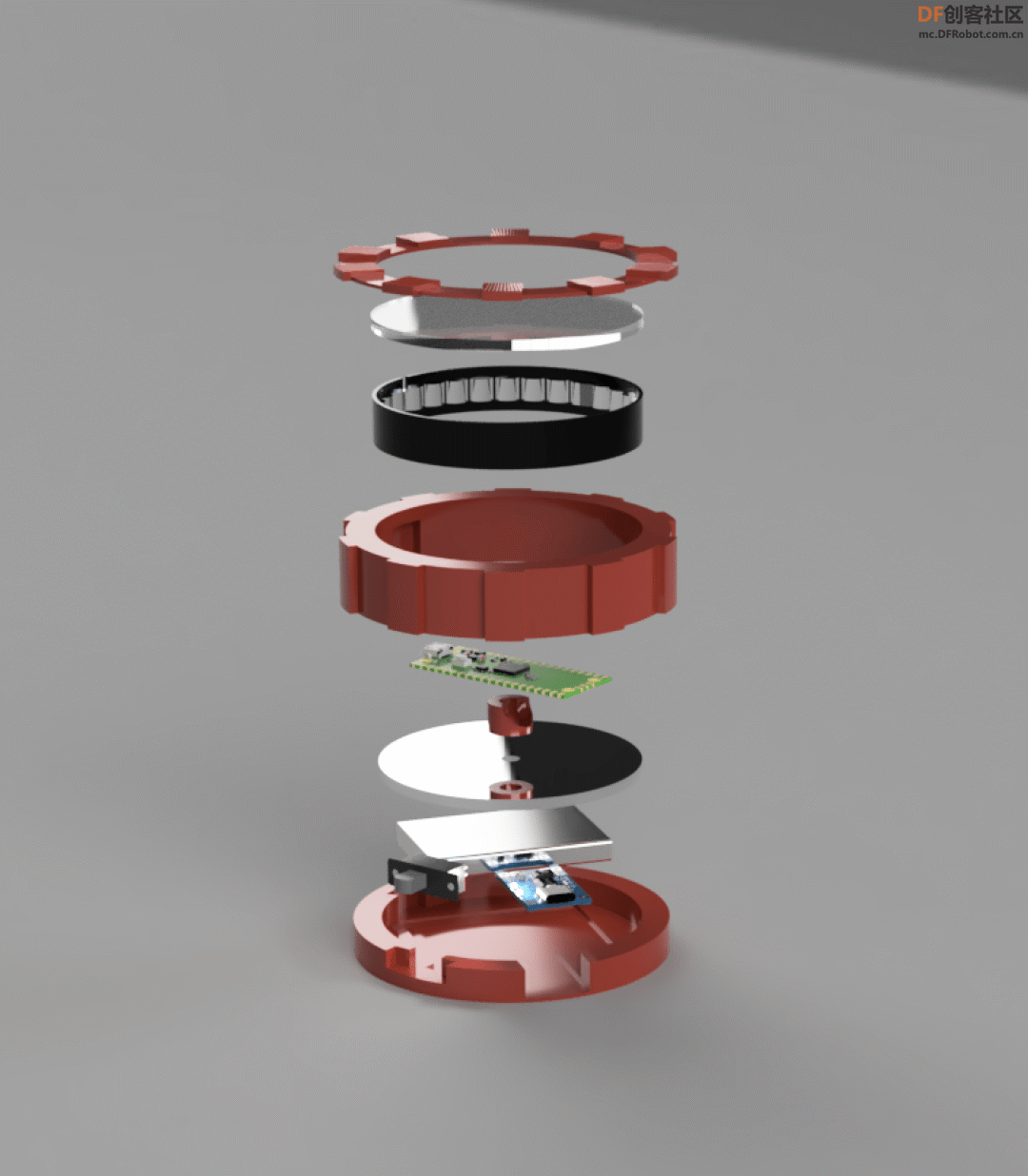 将已经粘合到镜面圆盘上的 Pico 与装有 LED 的主体和单向镜组成一个完整的装置,并与包含电池、充电板和开关的底座配对。确保你的所有导线尾部都穿过到了反应炉底座上。将两根蓝色数据线焊接在一起,将三根红色正线焊接在一起,将三根黑色负线焊接在一起,根据需要修剪任何多余长度的线材。可以使用热缩套管或胶带绝缘我们的连接点。 最后检查 在将所有部件粘合在一起之前,检查一切是否按预想的工作。通过滑动开关检查 LED 是否点亮;使用 USB-C 手机充电器或 USB 充电宝测试充电板的功能;充电时,LED指示灯将亮起。 现在,我们只需要将部件粘合在一起就ok了。 升级 升级!每个人都喜欢升级,尤其是钢铁侠。其实我们还可以使用树莓派 Pico W 运行一个 web 服务器,从手机浏览器上无线控制 LED。或者也可以加一些涂料,在反应炉背面粘贴一些魔术贴,这样我们就可以将它像托尼·斯塔克那样佩戴在胸前了。 原文作者:树莓派官方教程 原文连接:https://www.raspberrypi.com/tuto ... on-man-arc-reactor/ |

raspberry-pi-pico-iron-man-arc-reactor-model_files.zip
1.01 MB, 下载次数: 3769



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






