|
23491| 1
|
万圣节的电子动画头骨 |
本帖最后由 fibx 于 2023-10-20 09:07 编辑 万圣节的电子动画头骨
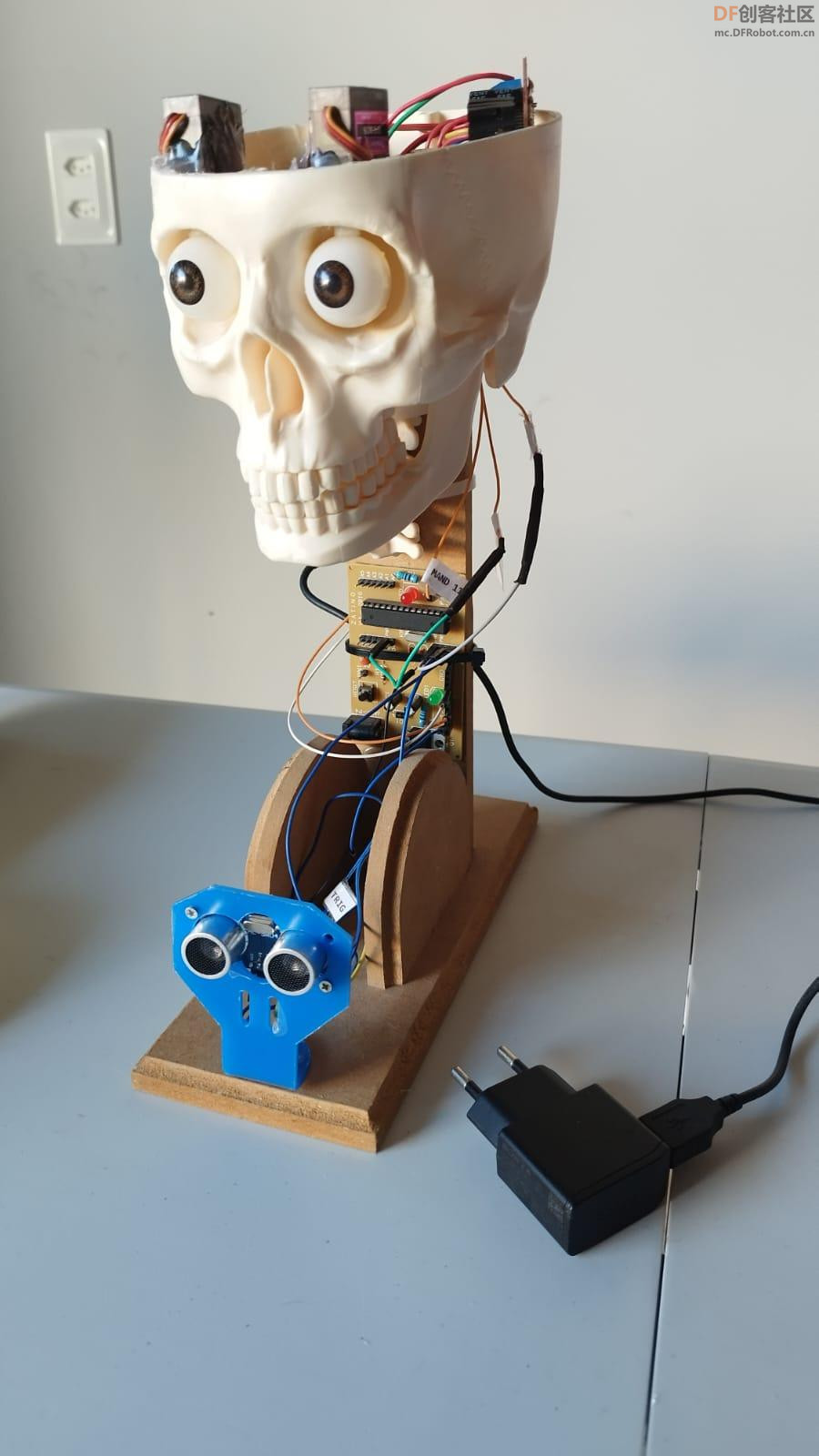
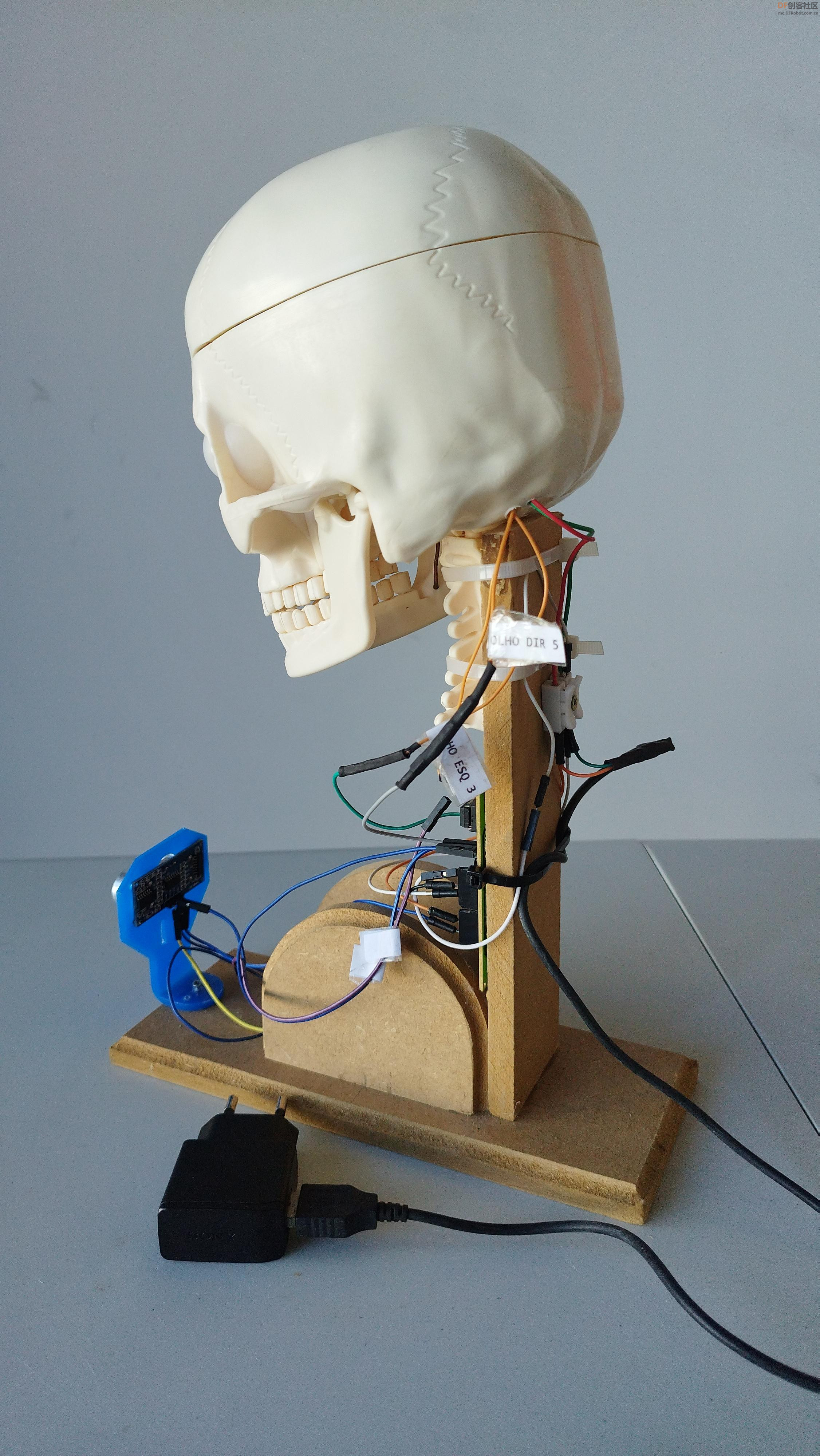
大家好!我叫帕特里夏(Patrícia),住在巴西,很高兴与大家分享我的第一个项目。我的英语可能不太流利,但我会在谷歌翻译的帮助下尽力而为。如果你有任何问题,请毫不犹豫地在评论区用任何语言提出问题,我会尽力回答!在这篇文章中,我想向您介绍一个有趣的互动项目,一个由 Arduino 驱动的电子动画头骨。这个头骨可以进行眼睛和下巴的运动,使其成为一件令人着迷且身临其境的电子艺术作品。 项目概况:这款电子动画头骨由两个作为眼睛的 5 毫米红色 LED 和三个作为控制眼睛和下巴运动的微型伺服电机组成,能创造出逼真的表情。但这个头骨真正的特别之处在于它具有对周围环境做出反应的能力。它配备了超声波传感器(HC-SR04),可以检测物体的接近程度,当有人接近或离开时,头骨可以做出不同的反应。眼睛和嘴巴动画的速度和强度变化多端,为附近的任何人提供互动和身临其境的体验。 如何计算所需电流:
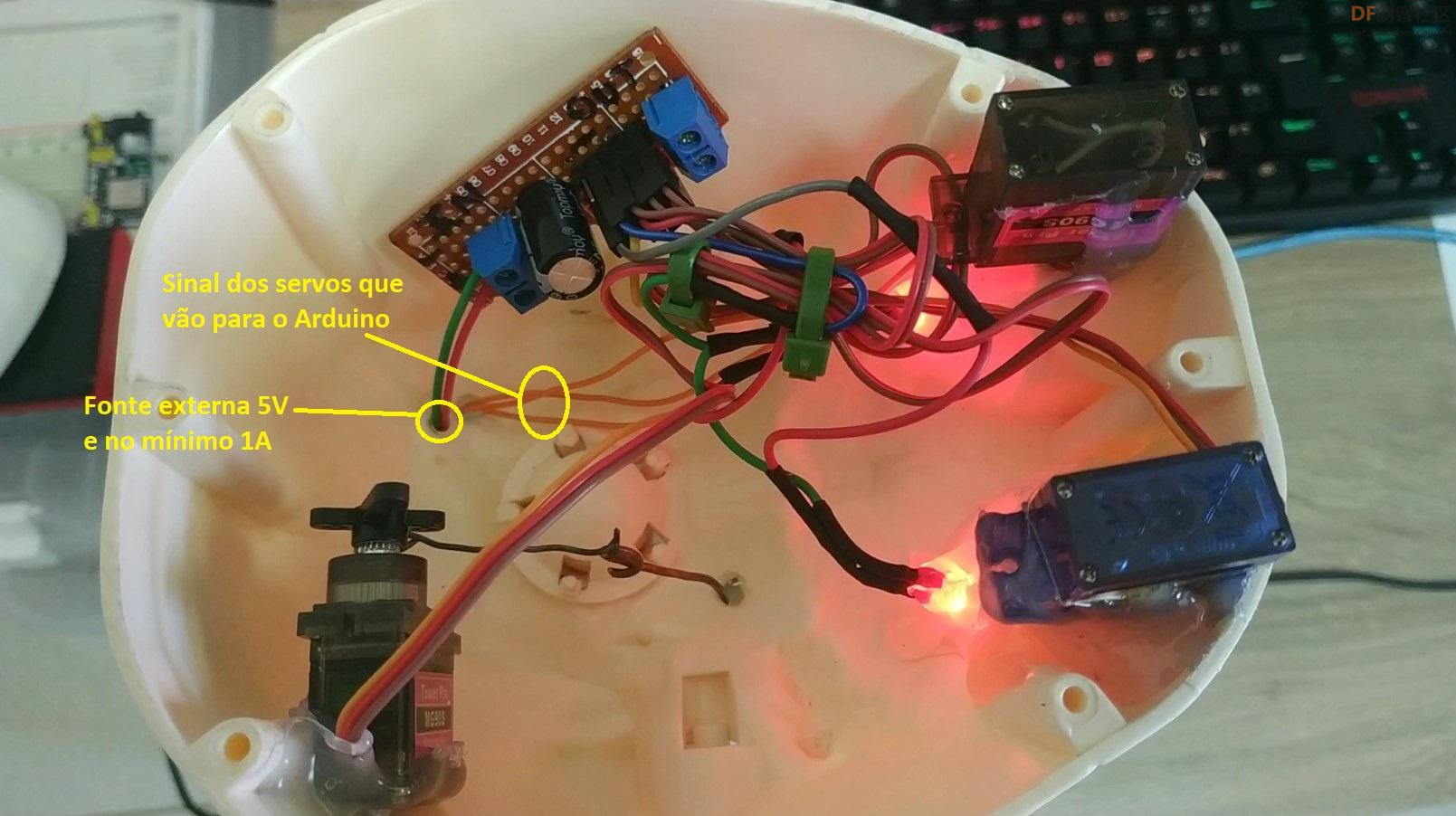
现在将所有电流相加: 所需总电流 = 0.04A (LED) + 1.65A (伺服) + 0.015A (传感器) + 0.05A (Arduino) = 1.755A (或 1755mA) 在极端情况下,所需的总电流为 1.755A (1755mA),但大多数情况下 1A 就足够了。 重要说明:关于控制: 控制伺服电机时,最好使用 PWM(脉冲宽度调制)引脚,因为它可以实现更平滑、更精确的运动。尽管可以使用非 PWM 数字引脚控制伺服电机,但这可能需要更多工作和编程技能。因此,只要有可能,请选择 PWM 引脚进行伺服电机控制。 关于传感器: HC-SR04超声波距离传感器不应连接到 Arduino PWM 引脚,因为它依赖于简单的脉冲协议来测量距离,而PWM引脚会生成具有可变脉冲宽度的脉冲信号。这种不兼容性可能会导致测量受干扰和不准确。为了实现可靠、准确的通信,请将传感器连接到 Arduino 的非 PWM 数字引脚。 结论: 制作电子动画头骨是一个独特且令人兴奋的项目,它融合了电子和艺术。Arduino 驱动的头骨能够对周围环境做出反应,增添了更多的互动性。如果您是 DIY 电子产品的粉丝,并且想要尝试一些创意,我希望这个项目能够激发您的灵感。请记住,无论您偏爱哪种语言,我都会帮助解决任何问题或进行解释。祝万圣节玩得开心,打造你的电子动画头骨! 材料所需材料:
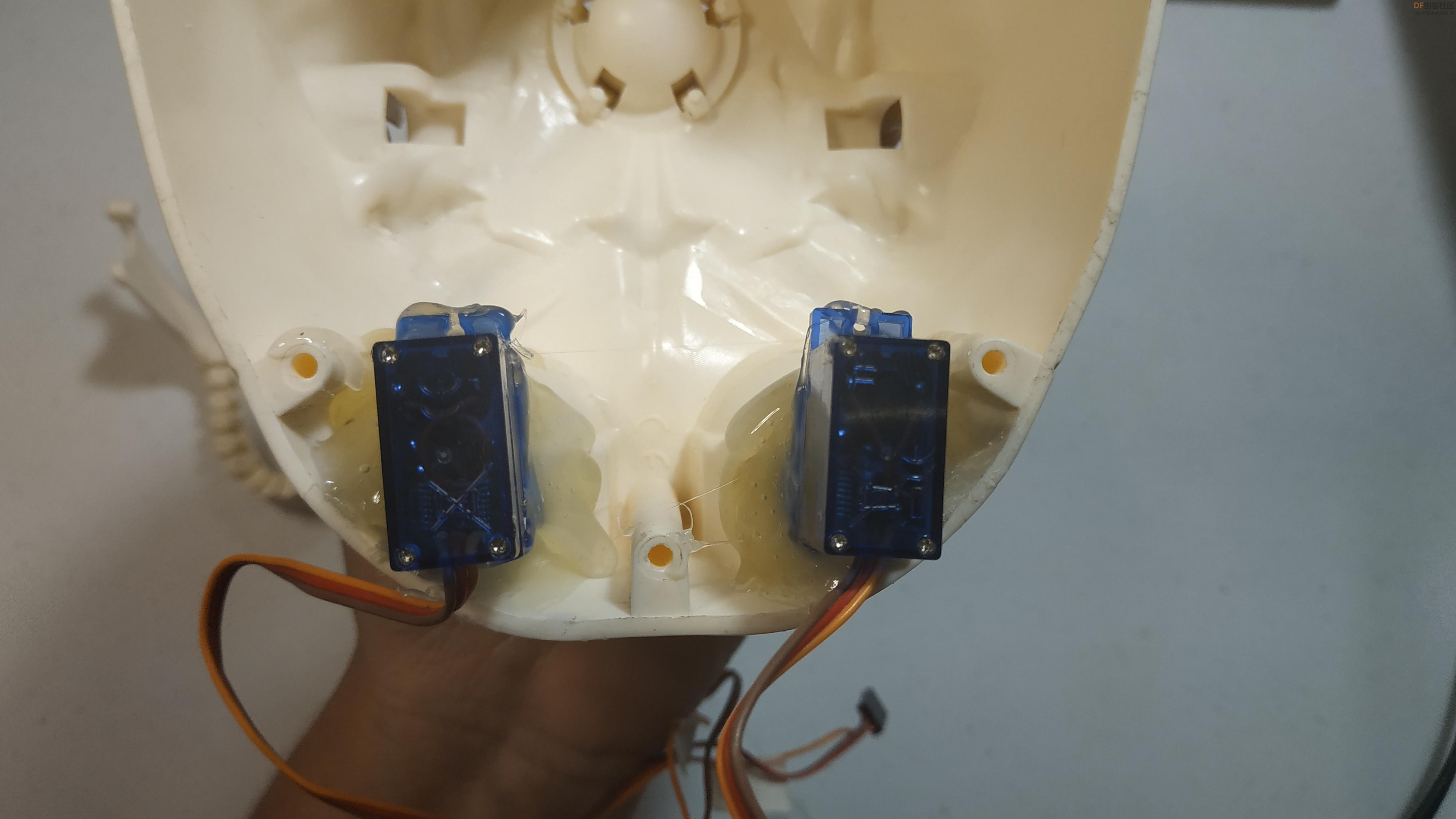
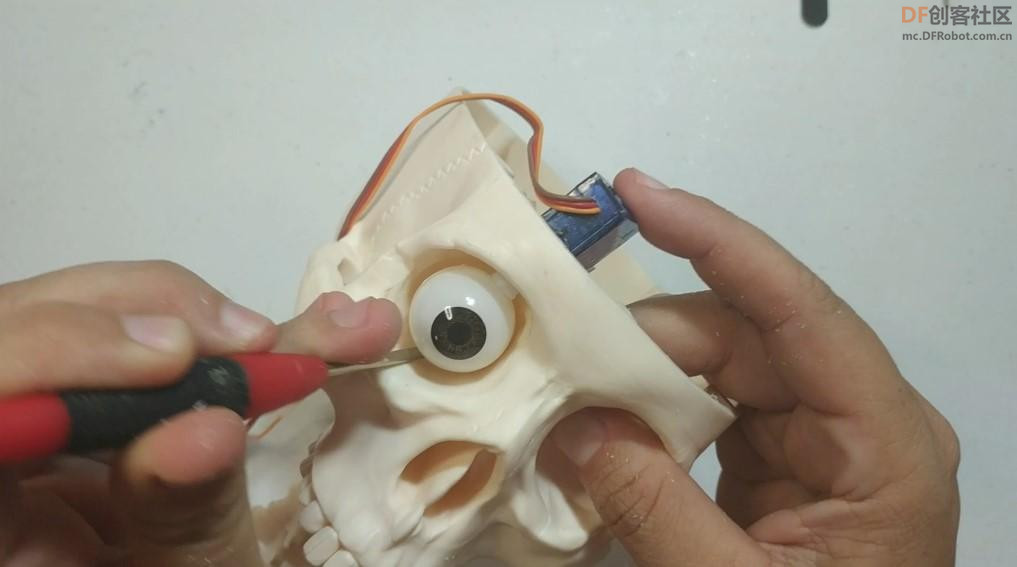
第 1 步:眼睛
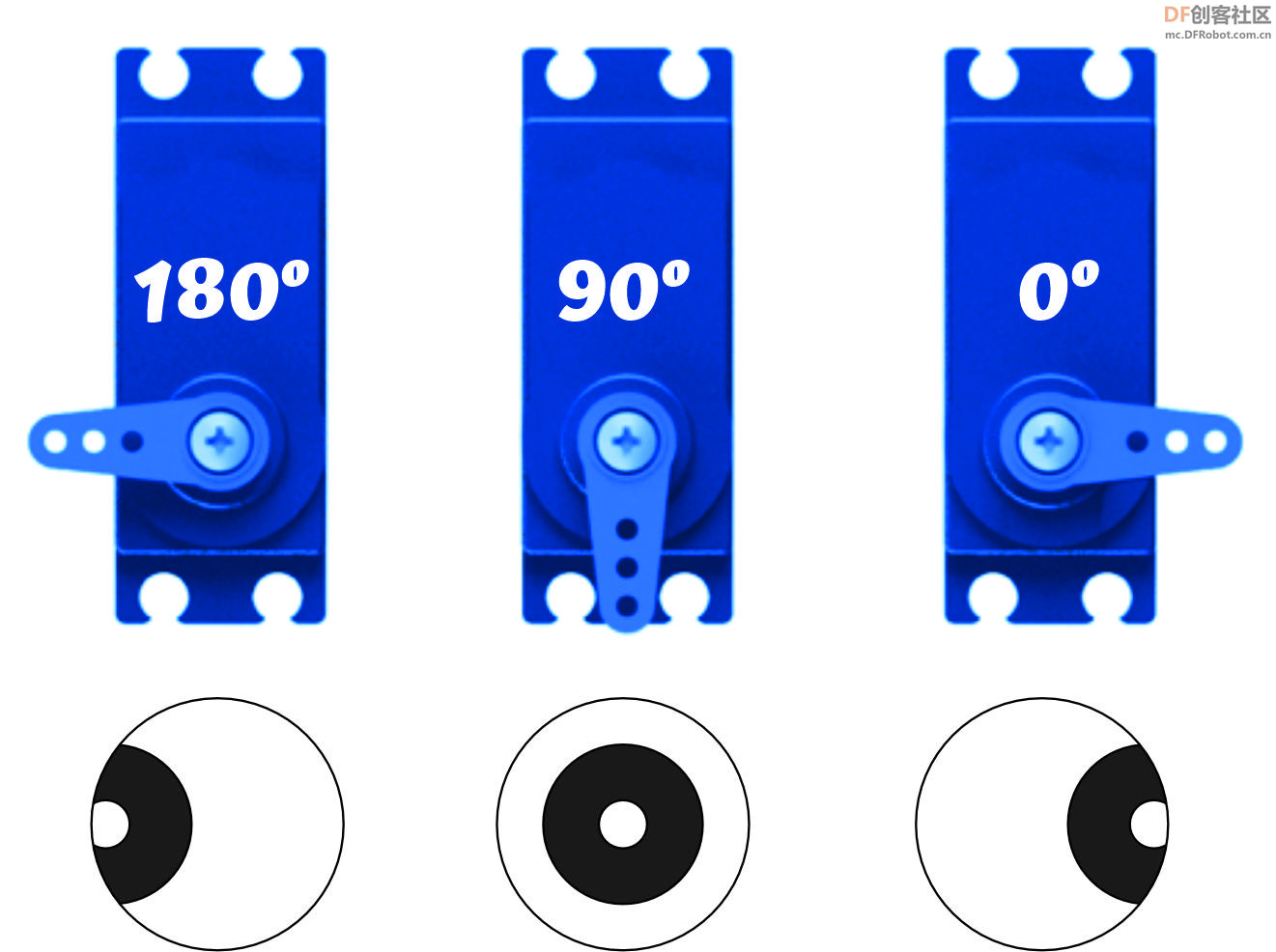
第 2 步:测试眼睛的角度
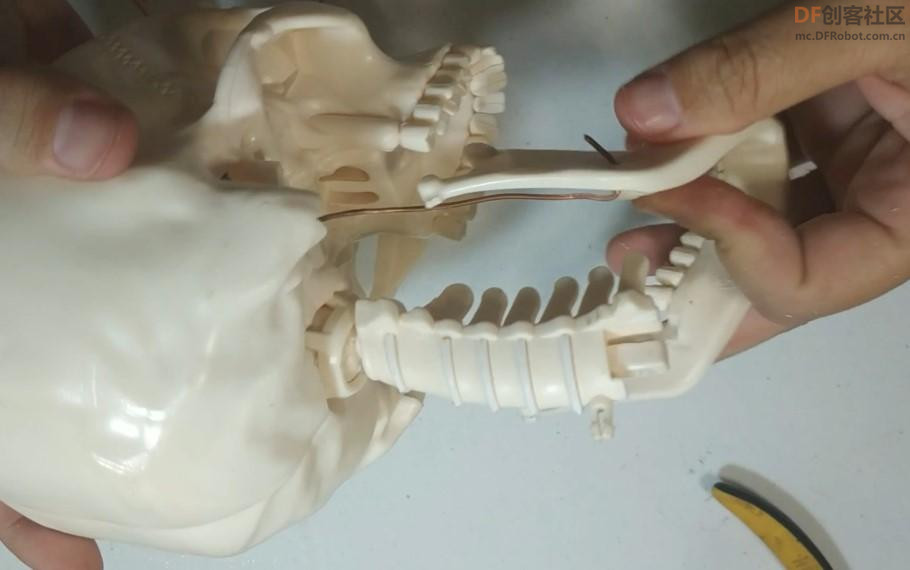
将眼睛放在正确的位置,以“直视前方90°”为中心轴; 向里和向外看:50° 或 130° 第 3 步:过线孔
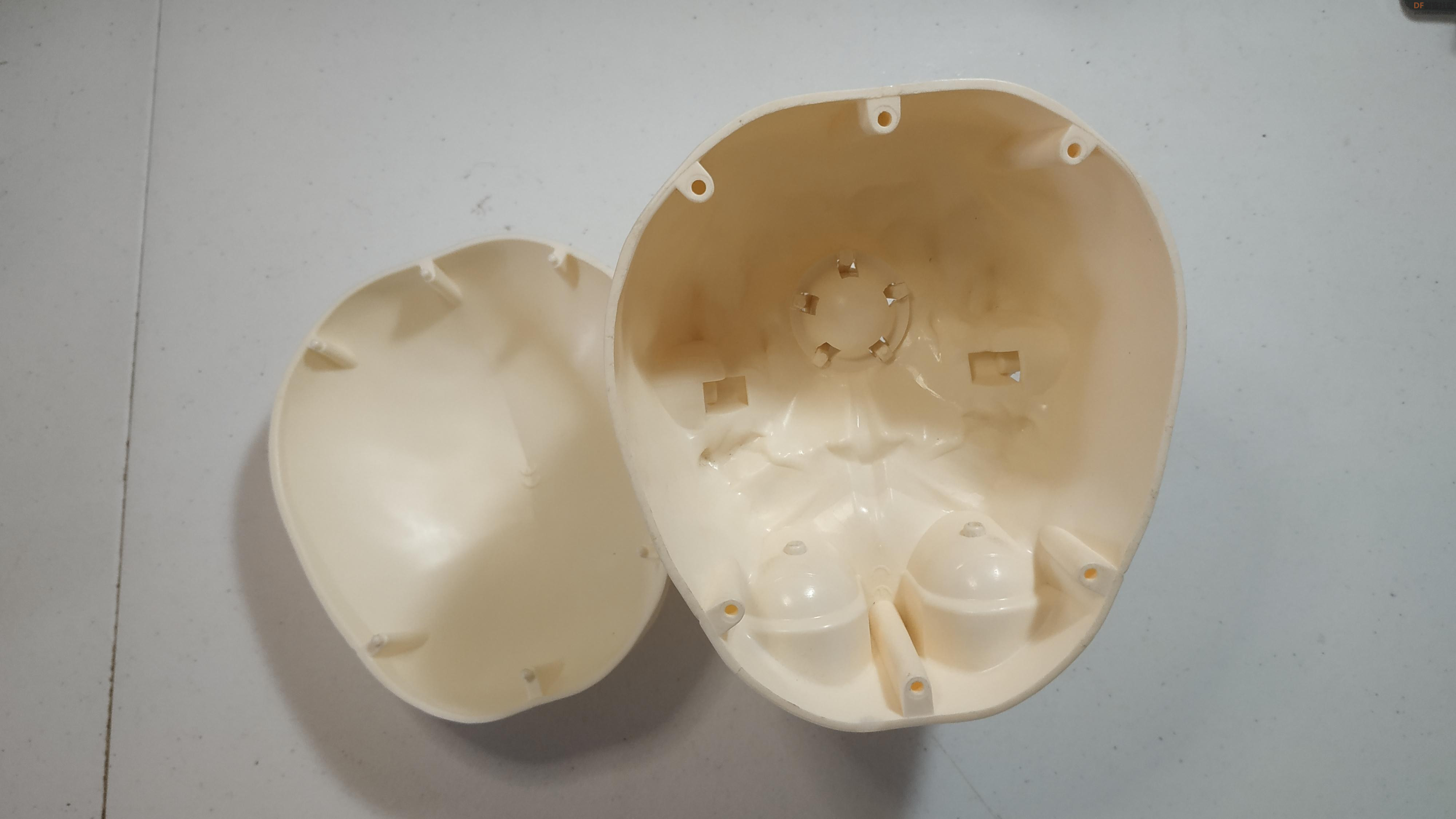
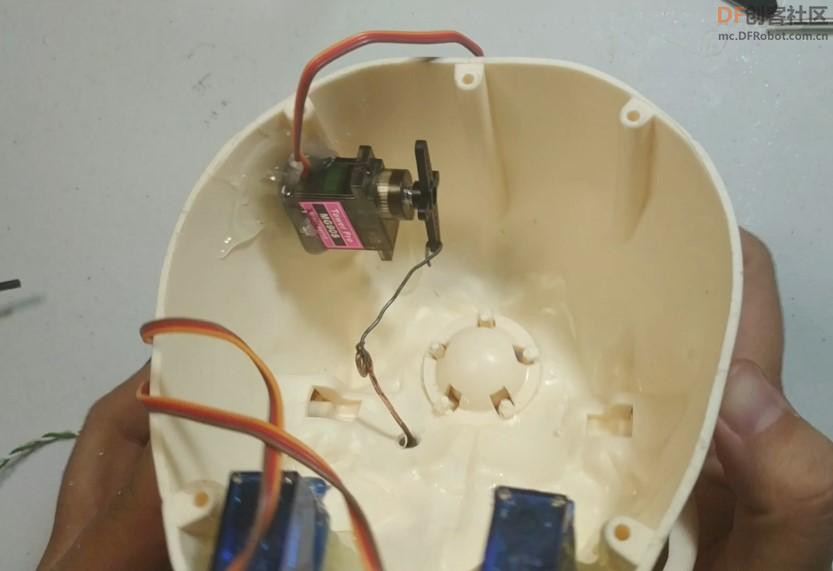
在头骨上钻一个孔,让刚性下颌线穿过。 第 4 步:下巴
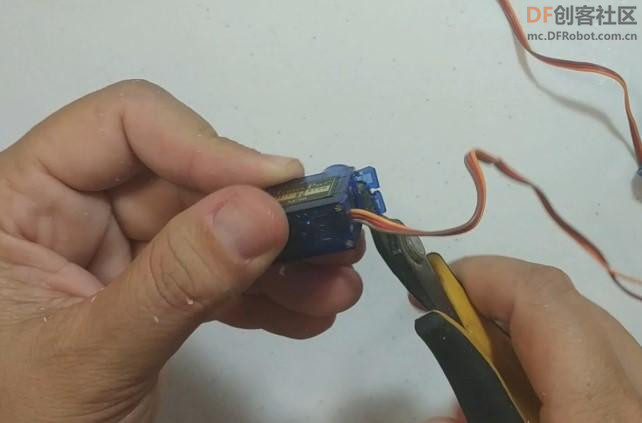
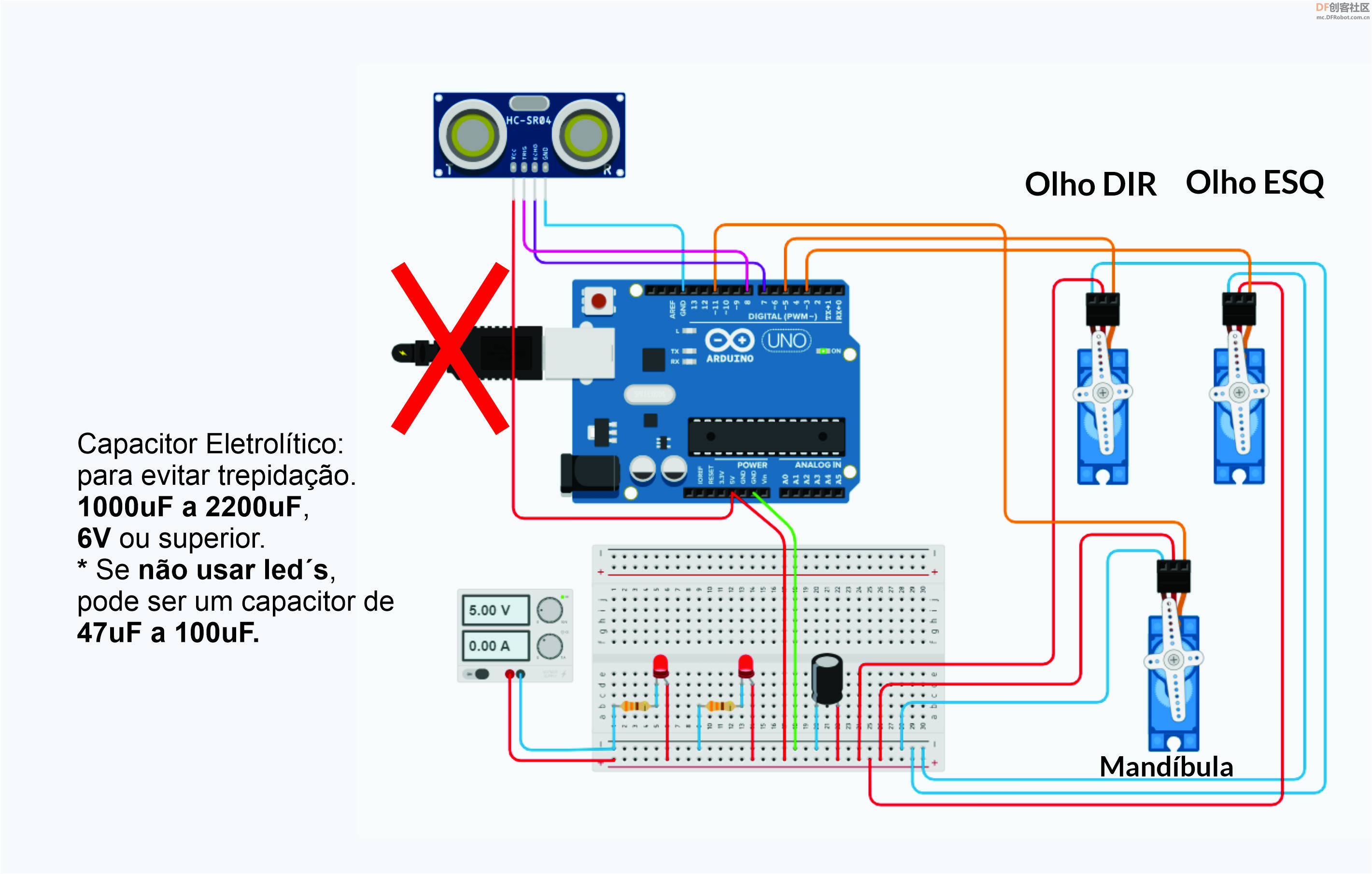
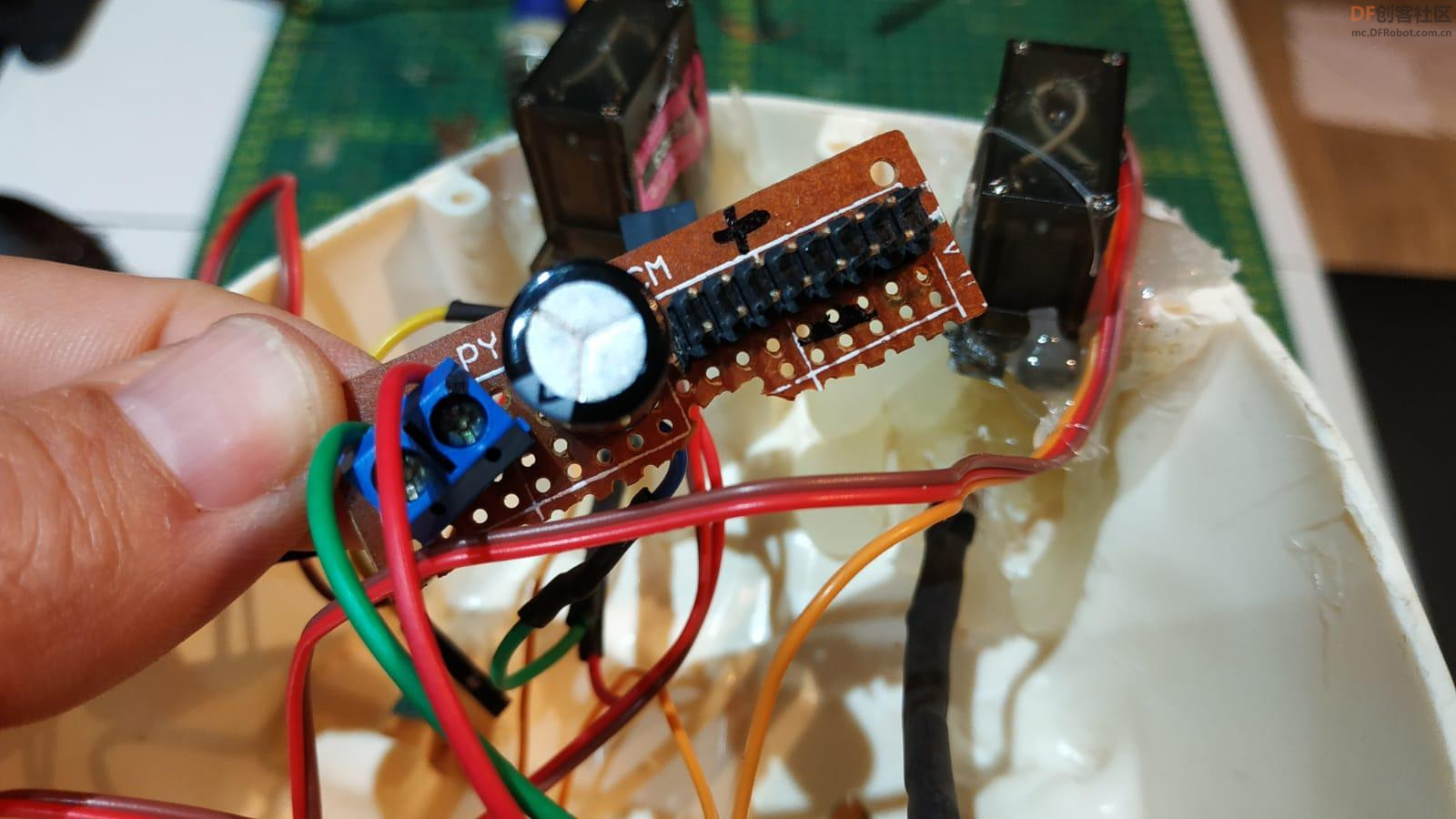
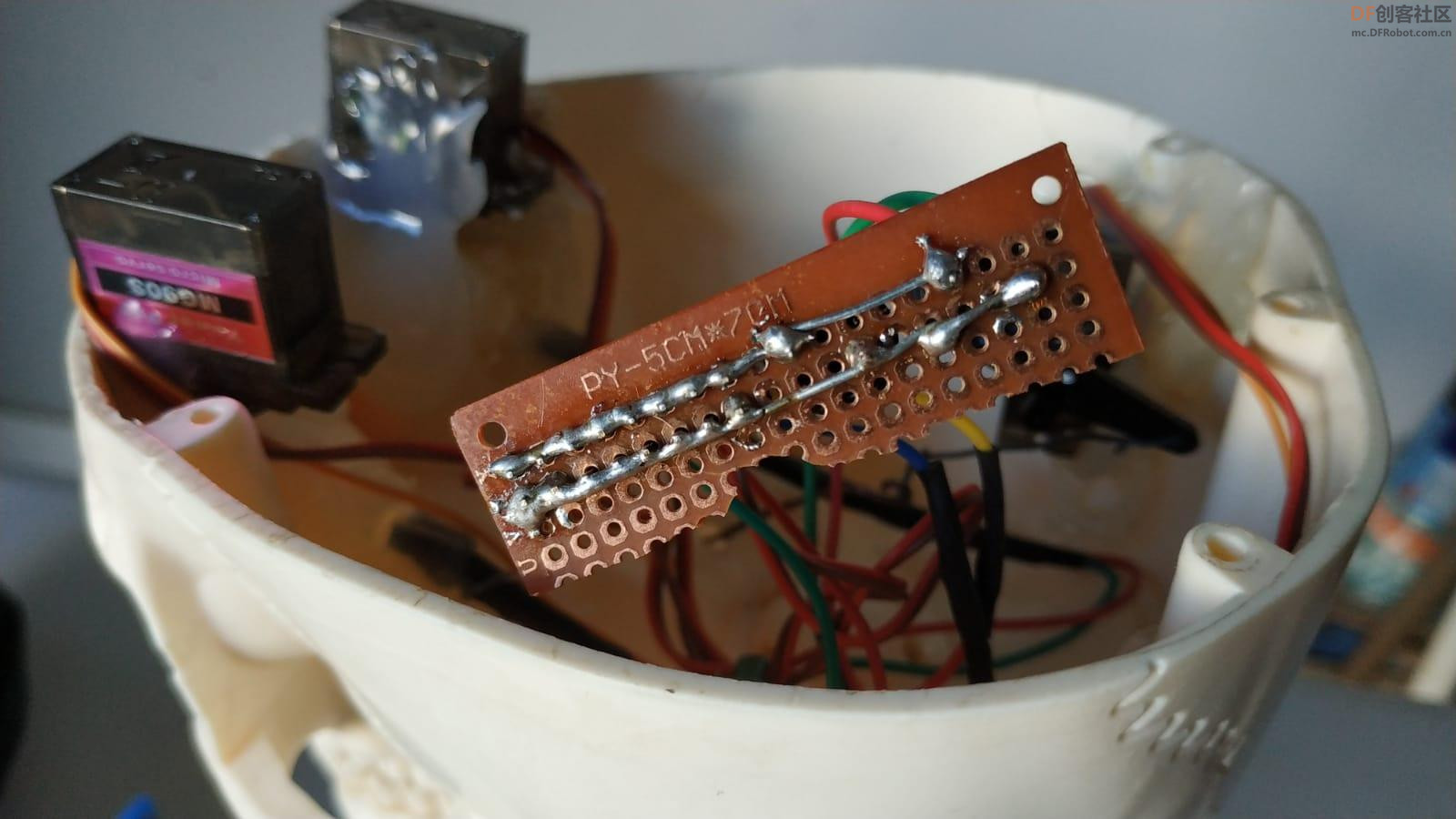
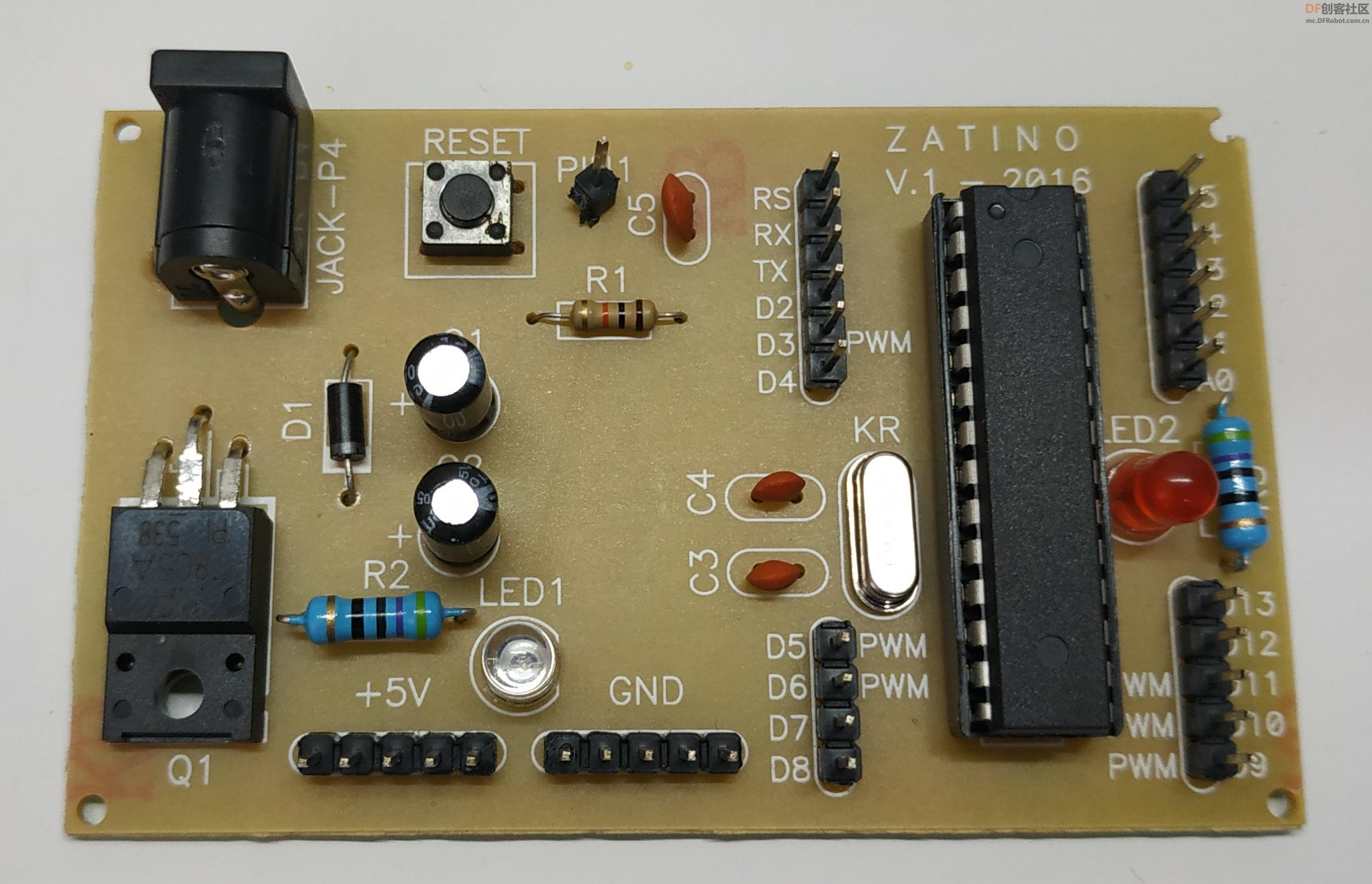
OBS:下巴伺服电机的角度,按如下参数调整: 嘴巴闭合:140° 半开嘴:110°和90° 张嘴:70° 第 5 步:连接
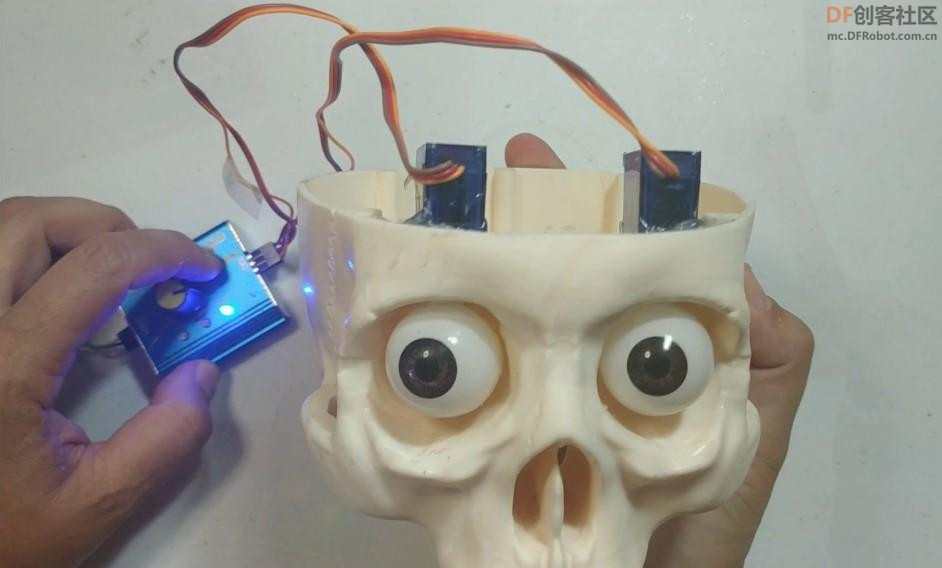
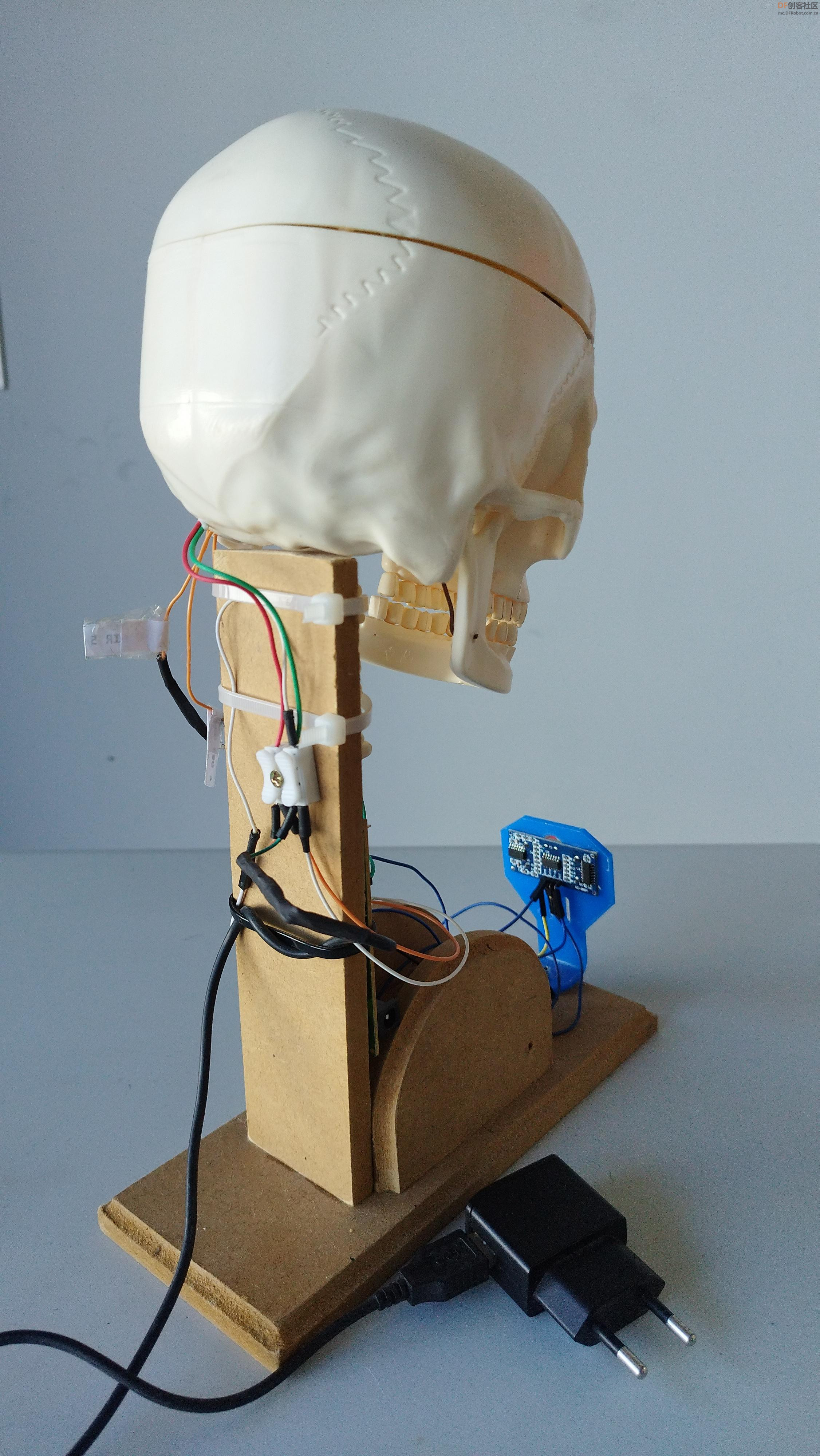
OBS:使用 Arduino Uno 或您选择的其他一种。 第 6 步:超声波传感器 HC-SR04 和最终组装
第7步:程序代码```c++ // 眼睛: const int olhoDireitoFora = 130; // 传感器引脚: // 伺服电机引脚: // 定义控制动画的距离。 附件:  HCSR04.zip HCSR04.zip
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

























 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶