|
15093| 1
|
[项目] DIY Arduino 超声波声呐——TFT 显示屏上的“雷达” |

|
本帖最后由 RRoy 于 2024-5-16 14:25 编辑 这是一个非常简单、易于制作、视觉效果好且自成一体的设备,非常适用于初学者和更高级的DIY爱好者。  需要的东西
正文 超声波声呐是一种利用高于人类听觉上限(通常高于20 kHz)的声波来测量物体距离的设备。它们的工作原理是发出声波,然后测量声波在撞击物体后反弹回来的时间。通过计算发出和接收到声波之间的时间差,可以使用空气中的声速来确定物体的距离。在我之前的一些视频中,你可以看到几种不同功能的此类设备的构建。所有这些设备都使用在Processing应用程序中编写的附加程序将结果显示在PC监视器上。 这次我们来描述一种制作独立声呐的简单方法,其中结果以雷达图像的形式显示在TFT彩色显示屏上,这也大家为什么会把它称为“雷达”而不是“声呐”的缘故。 我偶然从网上的一张图片中得到了这个想法,然后经过一点研究,在Github上找到了这个项目。原始项目是在1.8英寸的显示屏上制作的,这对于这个用途来说太小了。所以我想着把代码重新修改为更大的3.2英寸TFT显示屏,这样得到的图像会更加清晰。 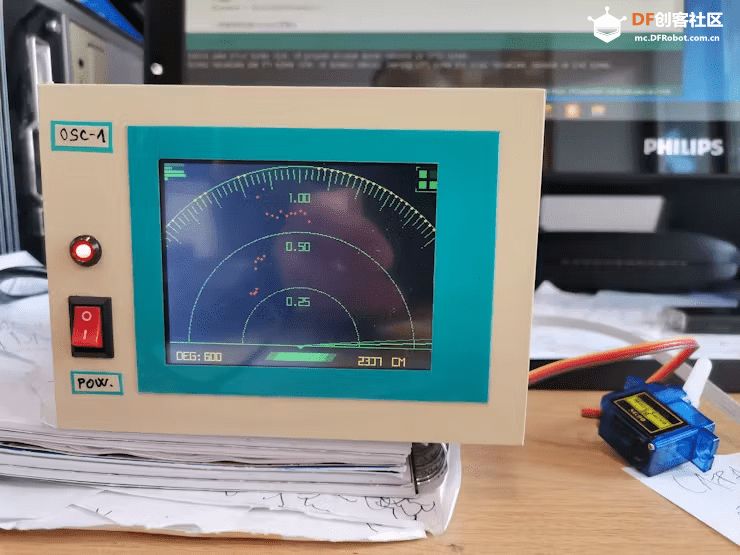 这个设备很简单,只由几个组件组成:
伺服电机和超声波传感器安装在一个单独的盒子中,我用了一个以前项目中的盒子,并通过扁平电缆将其连接到主盒子。 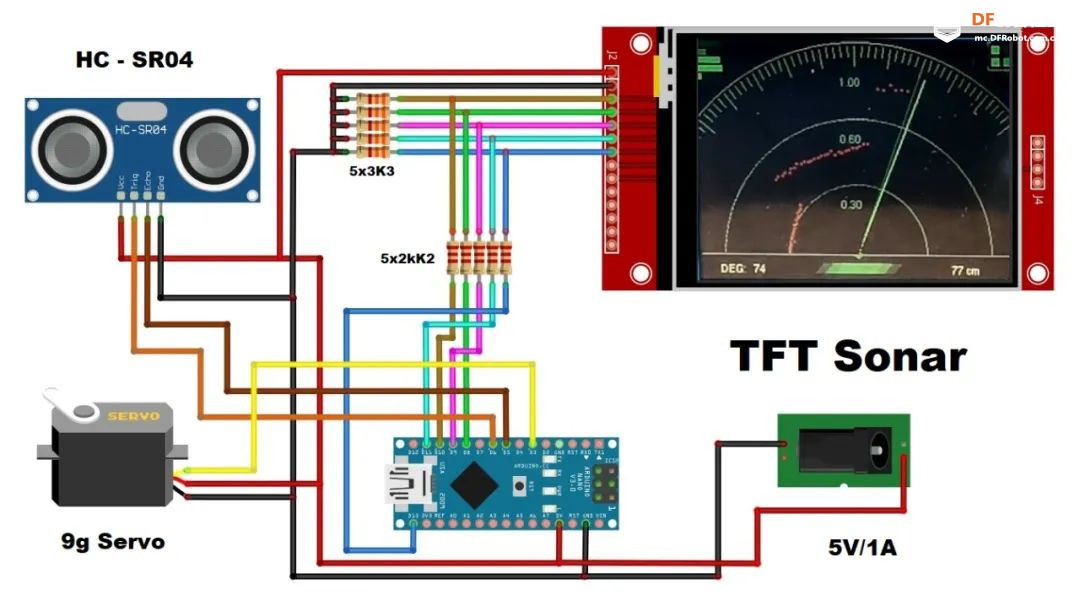 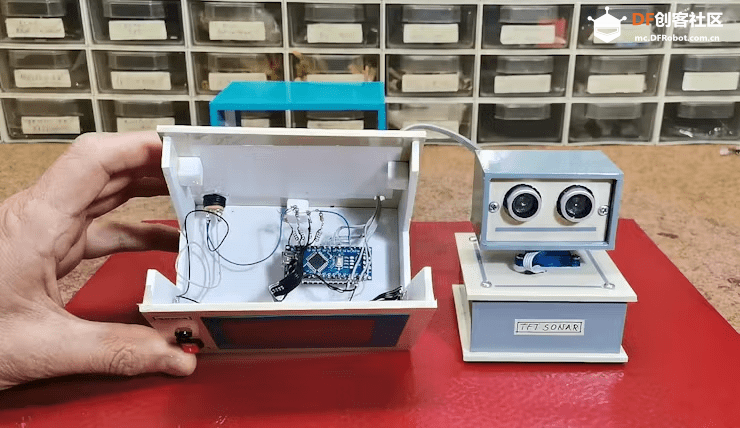 现在让我们看看设备在实际条件下是如何工作的: 一开始,我将超声波传感器与伺服电机分开,以便将图形表示与物体的实际距离进行校准。正如图所示,实际距离完全对应于显示屏上显示的距离。 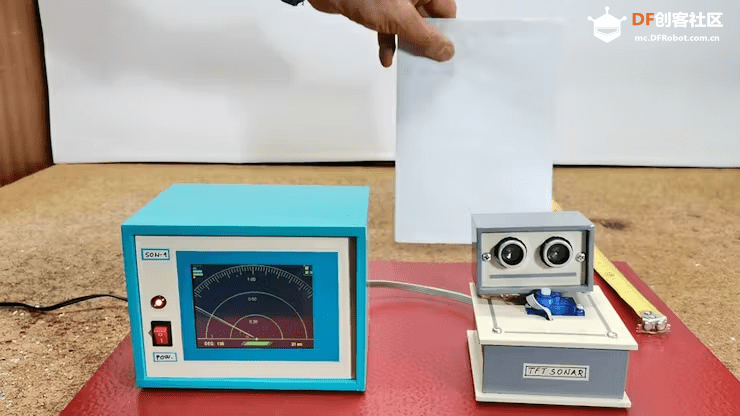 然后我们将传感器安装在伺服电机上并放置要检测的障碍物。开机时,首先测试伺服电机,然后在显示屏上绘制雷达样式的屏幕,并开始扫描。  障碍物用红点标记。在左下角显示扫描区域,右侧显示传感器与障碍物之间的距离(以厘米为单位)。三个标有距离的绿色弧线帮助我们更容易看到和了解实际距离。如果最近的障碍物大于1米,最后一个弧线会绘制黄色点,表示超出范围。扫描首先从180度到0度进行,然后反向,从0度到180度进行。 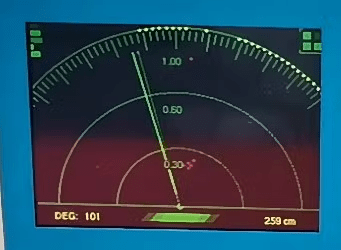 为了在操作期间的稳定性,设备最好由外部电源供电,但它也可以通过Arduino上的USB供电。所有显示颜色可以根据用户的喜好在代码中轻松更改。 最后是一个简短的结论。大多数这类设备会在PC显示器上显示扫描结果,需要额外的应用程序和代码。这是一个非常简单、易于制作、视觉效果好且自包含的设备,旨在供初学者和更高级DIY爱好者使用。作者使用了以前项目中的外壳,最好把所有部件放入一个外壳中,并配有倾斜前置显示屏,这样可以视觉模拟真实雷达系统。 原文地址:https://www.hackster.io/mircemk/ ... -tft-display-b5dde3 项目作者:Mirko Pavleski 译文首发于:DF创客社区 转载请注明来源信息 |

178.98 KB, 下载次数: 4886



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






