|
6934| 2
|
[项目] 基于Arduino做的“鱿鱼游戏”BOSS面具,支持动作检测 |

|
本帖最后由 RRoy 于 2024-10-16 16:01 编辑 这是一个结合了3D打印、舵机、PIR传感器和DFPlayer MP3模块的DIY项目,旨在制作一个带有动画眼睛的"鱿鱼游戏"老板面具。当检测到动作时,面具的眼睛会移动并播放声音,非常适合万圣节使用。  这个项目是一个很好的起点,特别适合那些想控制眼球运动和播放特定音频文件的小伙伴们。通过协调PIR传感器检测到的运动、舵机的移动和DFPlayer的音频播放,你可以实现一个非常优秀的动画效果。 步骤1:3D打印部件 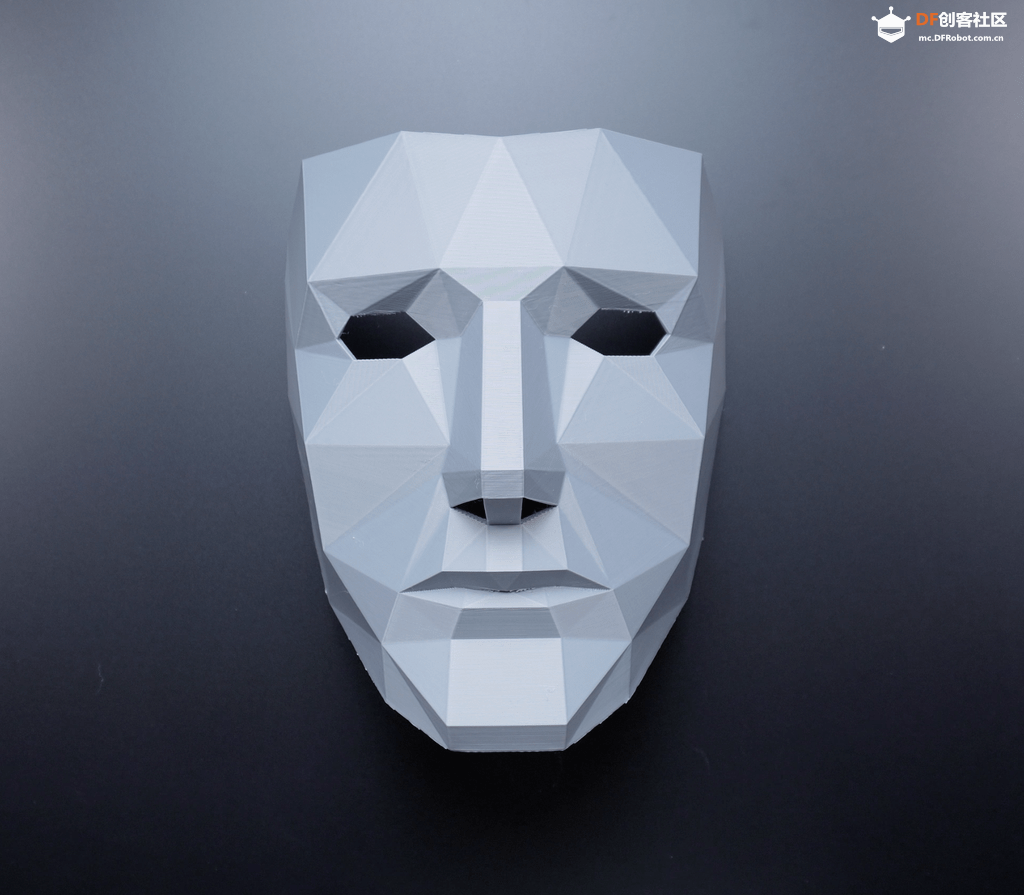 眼睛及面具本身都是使用标准3D打印机和PLA打印出来的。打印质量为中等,如果你想要更好的外观,可以打磨然后平滑地涂上颜料。 3D打印组件包括:  
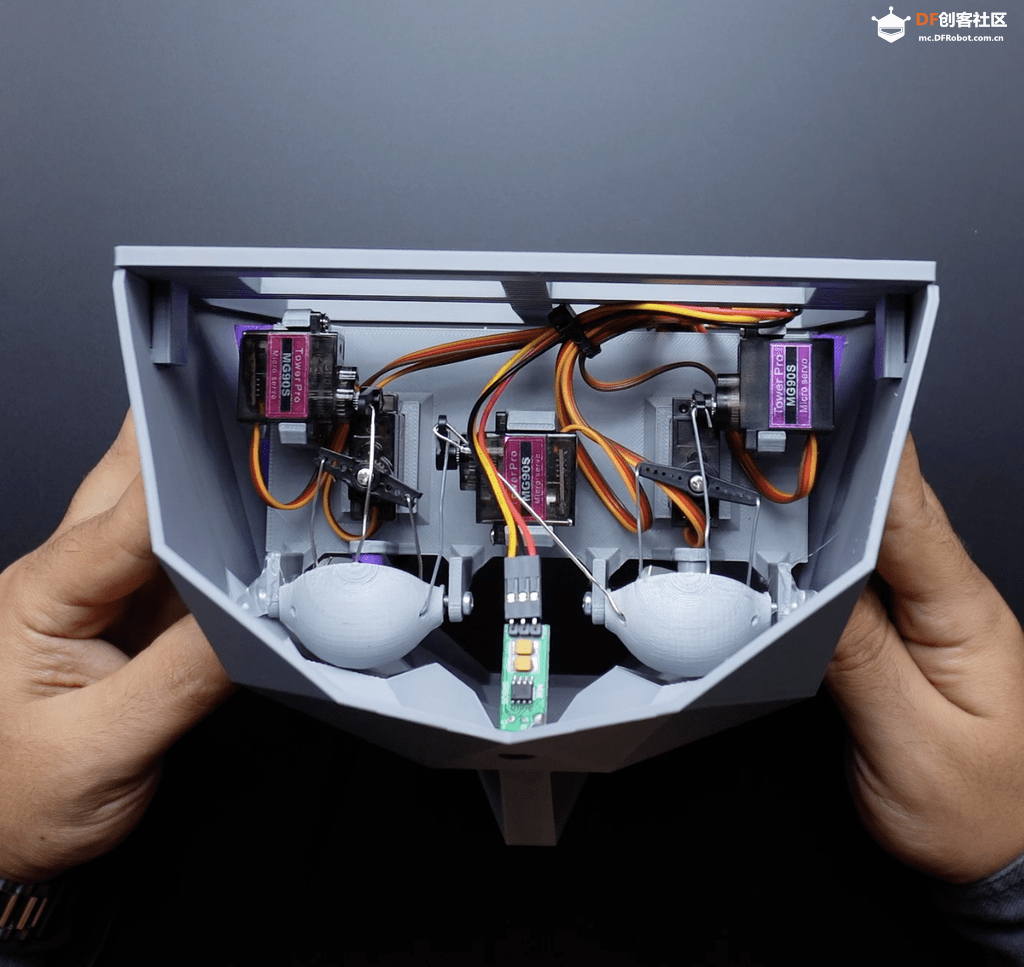
你可以选择使用不同颜色的眼球,甚至在打印后手绘。万向节对眼睛的平滑运动至关重要,使其能够模拟真实的动作。 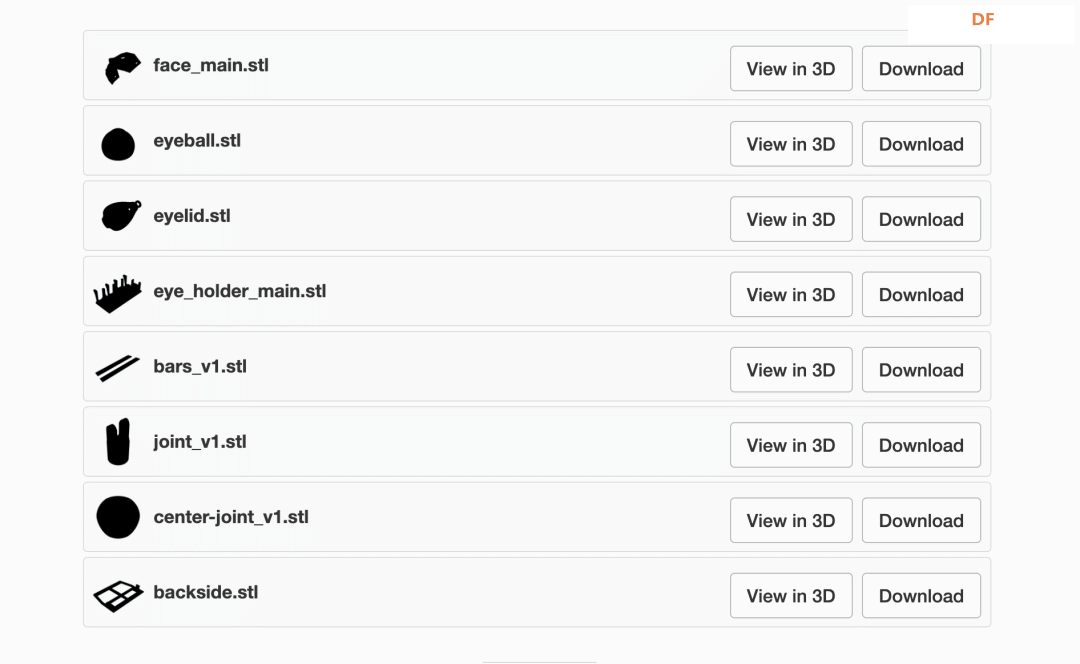 3D打印文件可以文末下载。 步骤2:组装眼睛 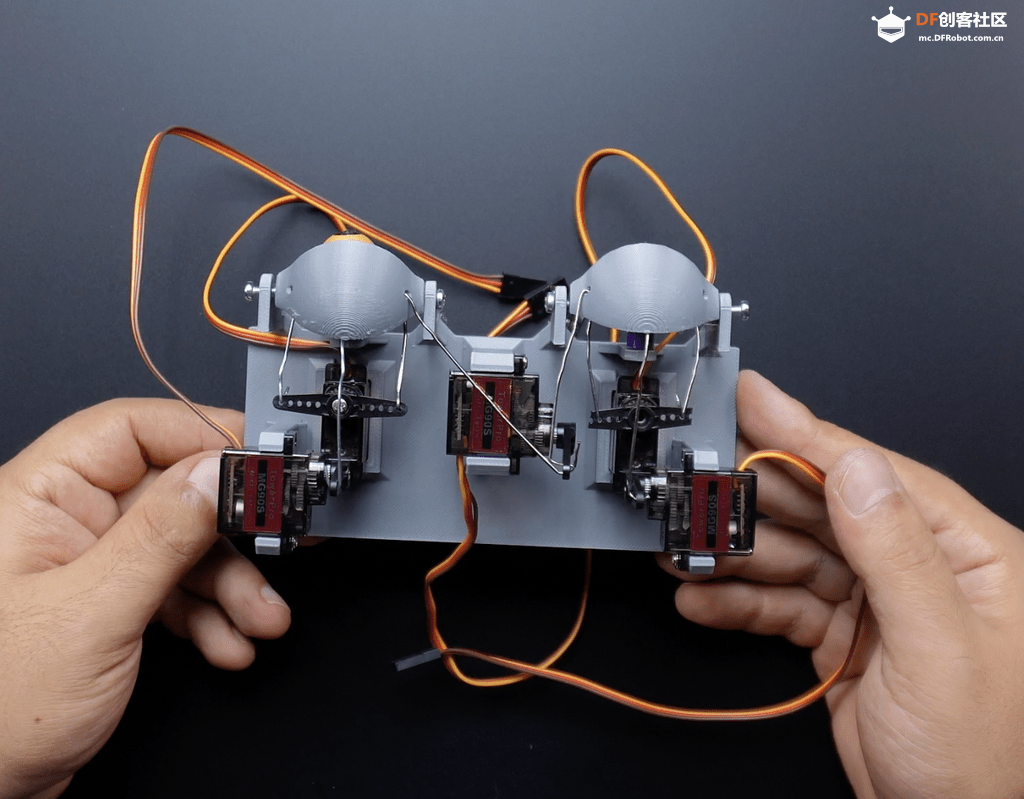 现在我们有了3D打印的部件,是时候开始组装眼睛了。我们将使用五个MG90S舵机来控制眼睑和眼球的运动。以下是需要的材料: 组件:

组装过程: 校准舵机:确保所有舵机初始位置为90度。这对于确保动作的正确校准非常关键。  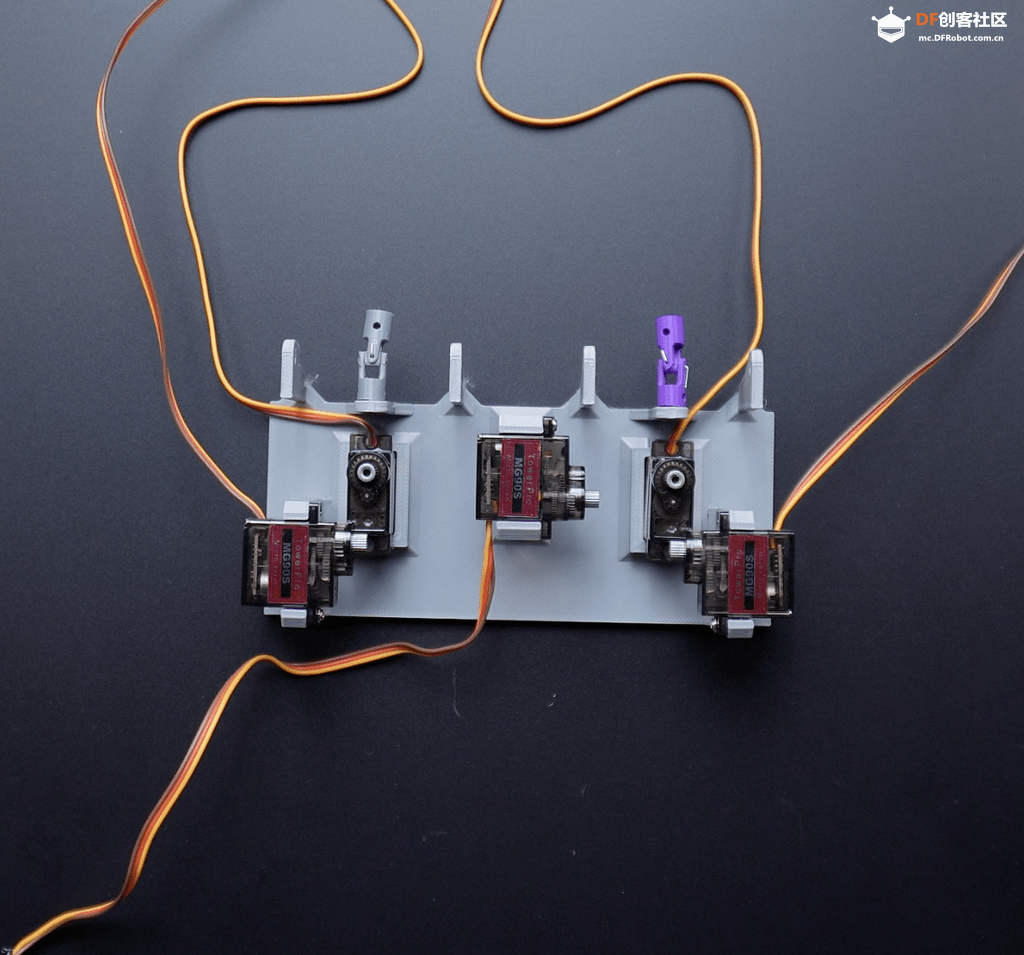 安装舵机:将每个舵机放入3D打印的舵机支架中。两个舵机控制眼睛的左右运动,两个控制上下运动,一个用于眼睑。 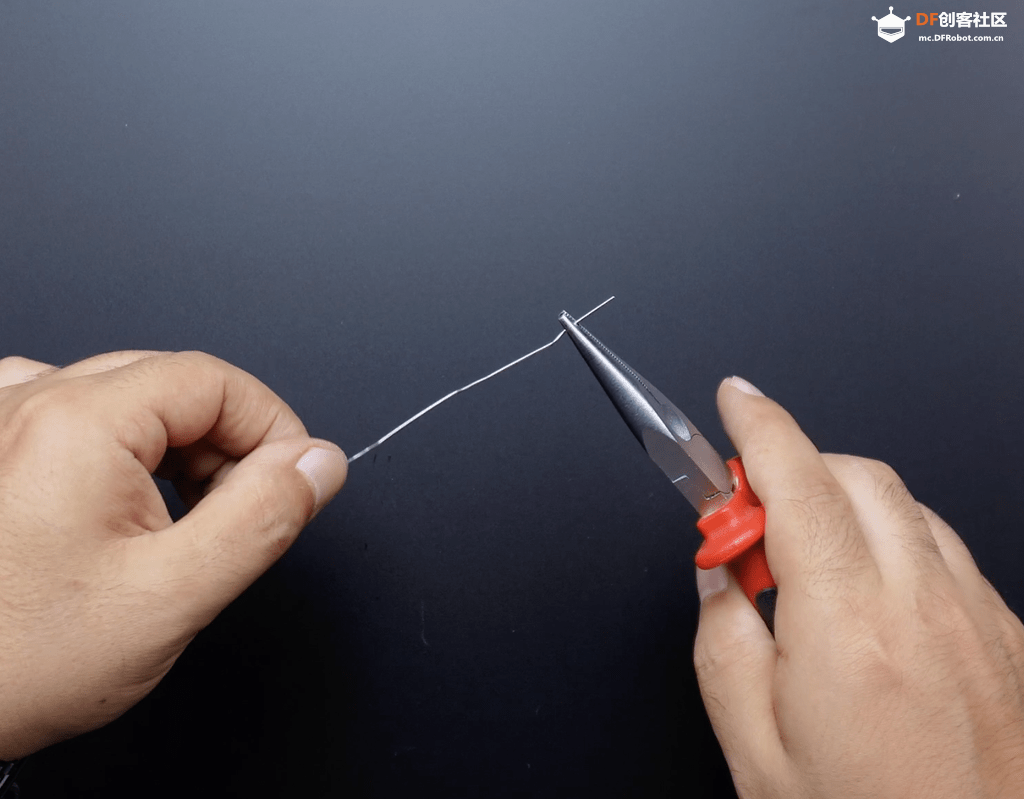 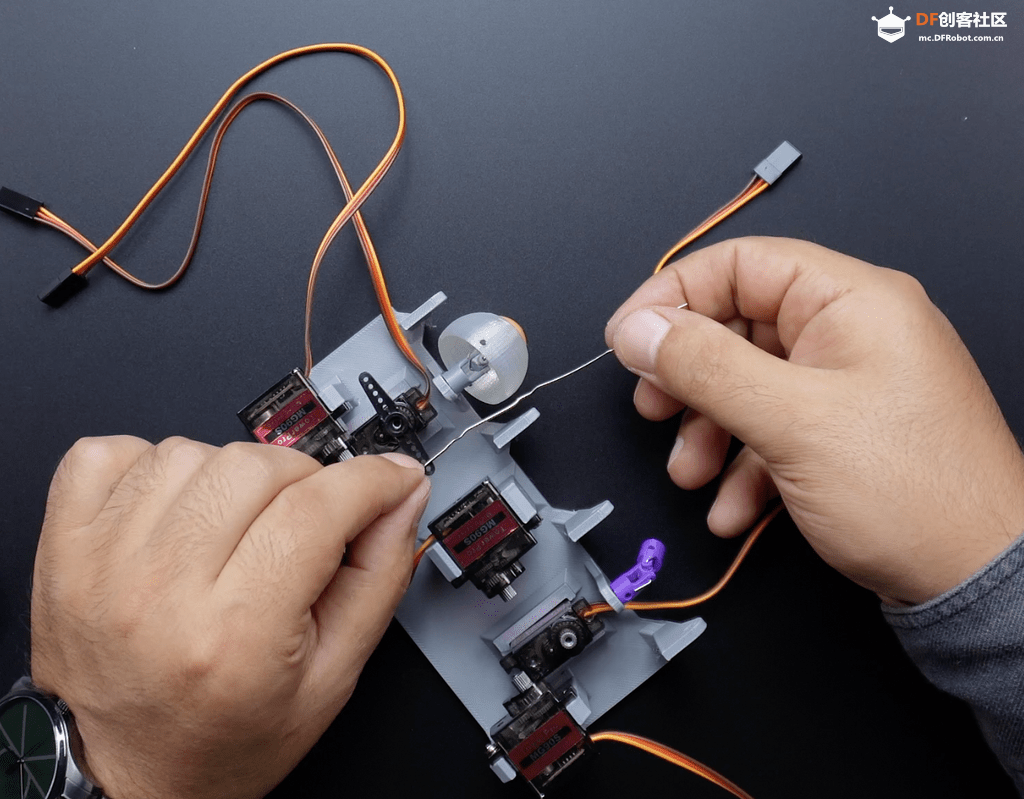 连接眼球:使用回形针线将舵机与眼球连接,形成连杆结构。这会将舵机的旋转传递给眼球运动。添加万向节确保眼球运动平滑。  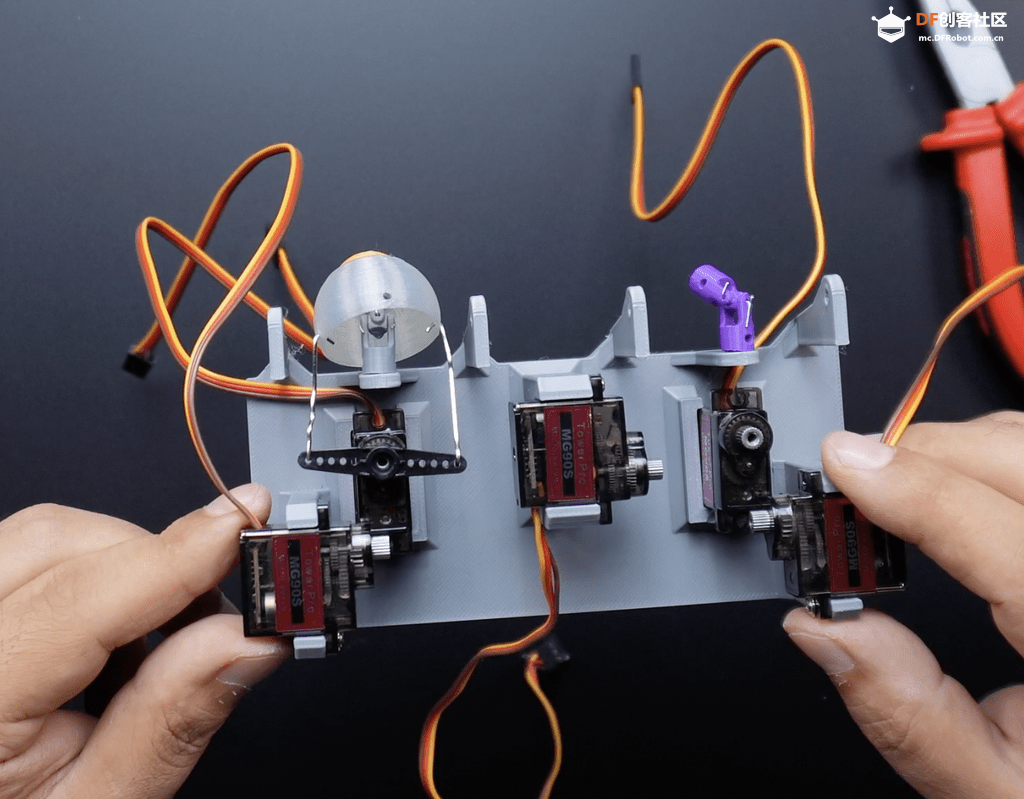 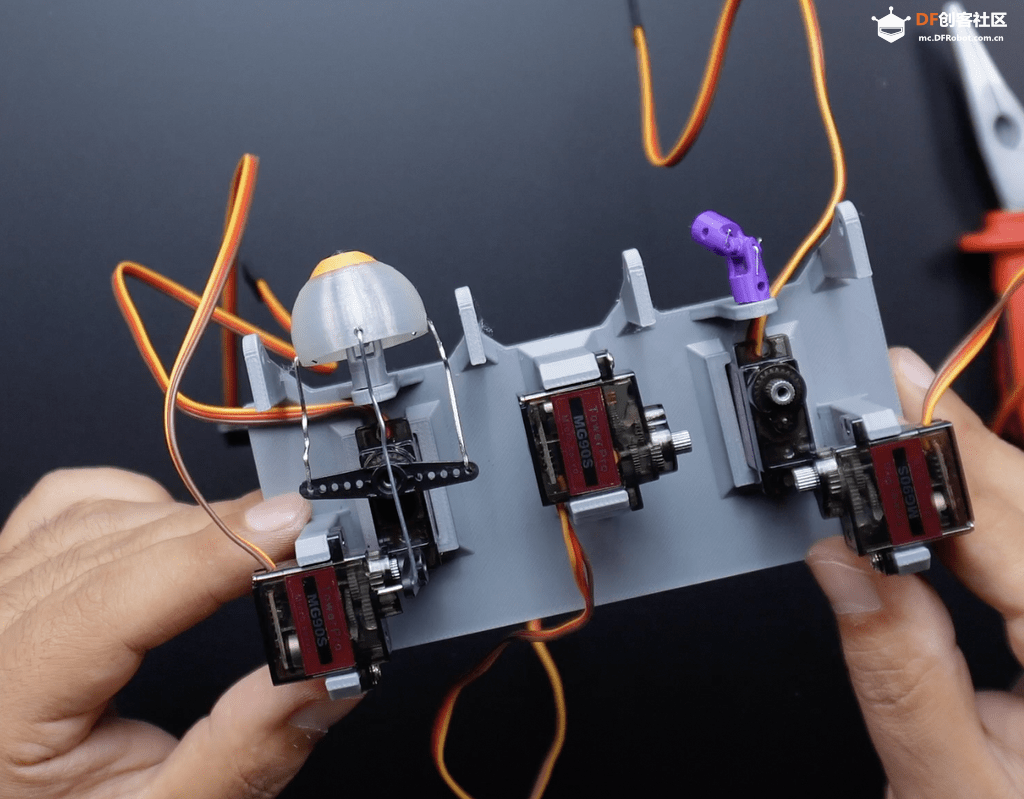 连接眼睑:最后一个舵机将控制眼睑,使你的面具能够眨眼或闭眼。使用相同的方法将眼睑连接到舵机上。 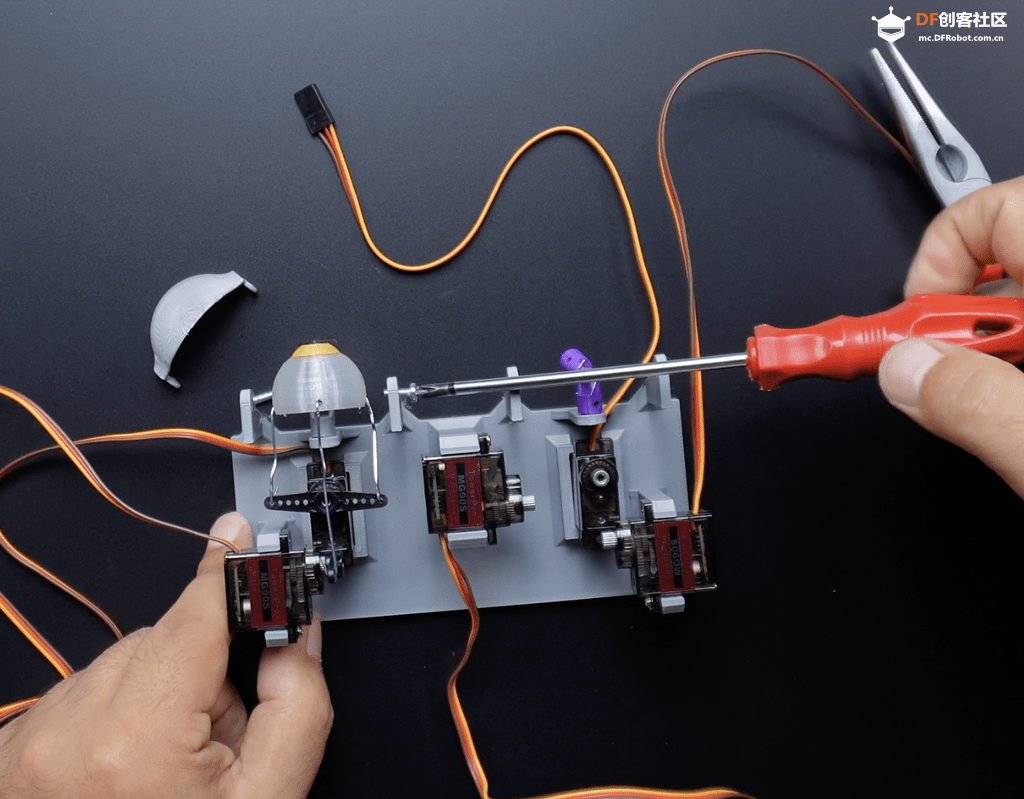 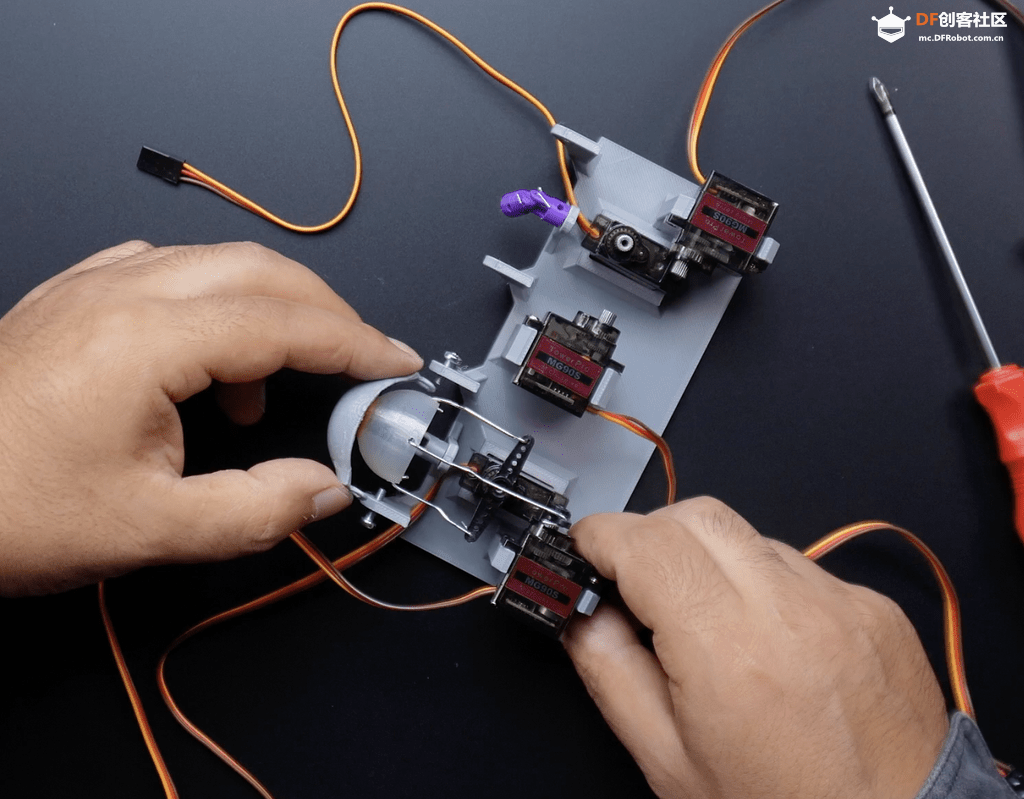 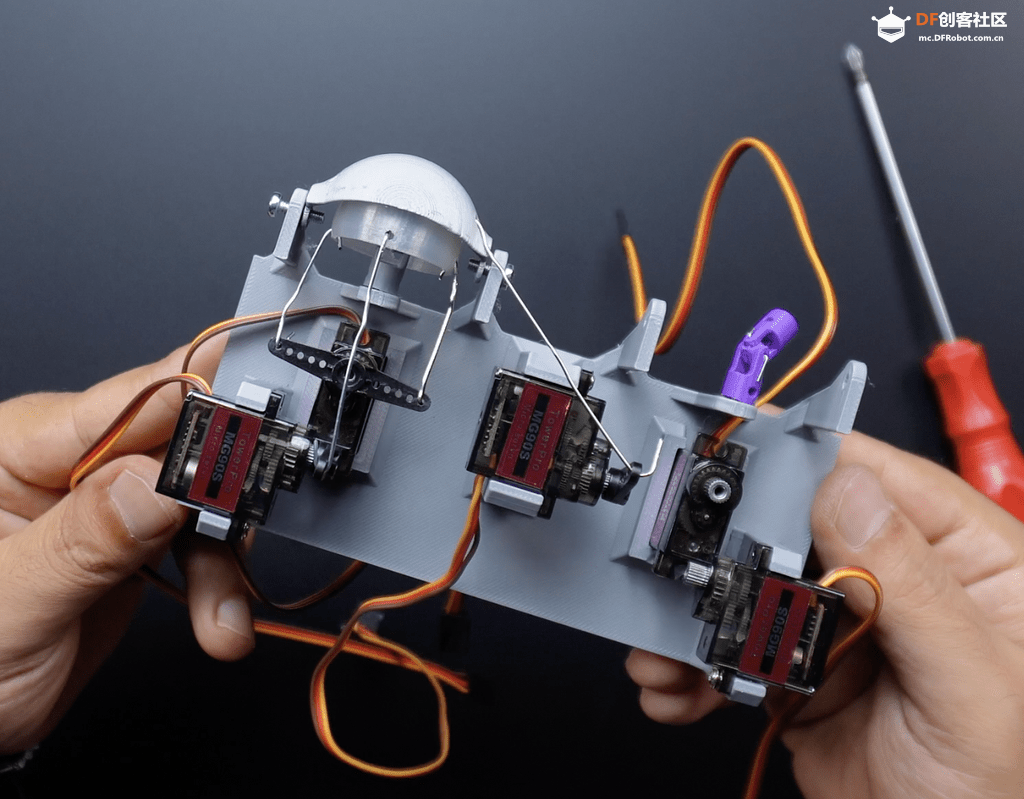 眼睛的运动依靠伺服电机在两个轴上(上下和左右)进行操控。每只眼睛的运动由两个伺服电机控制,而眼睑的开合则由一个伺服电机控制。 步骤3:测试眼睛 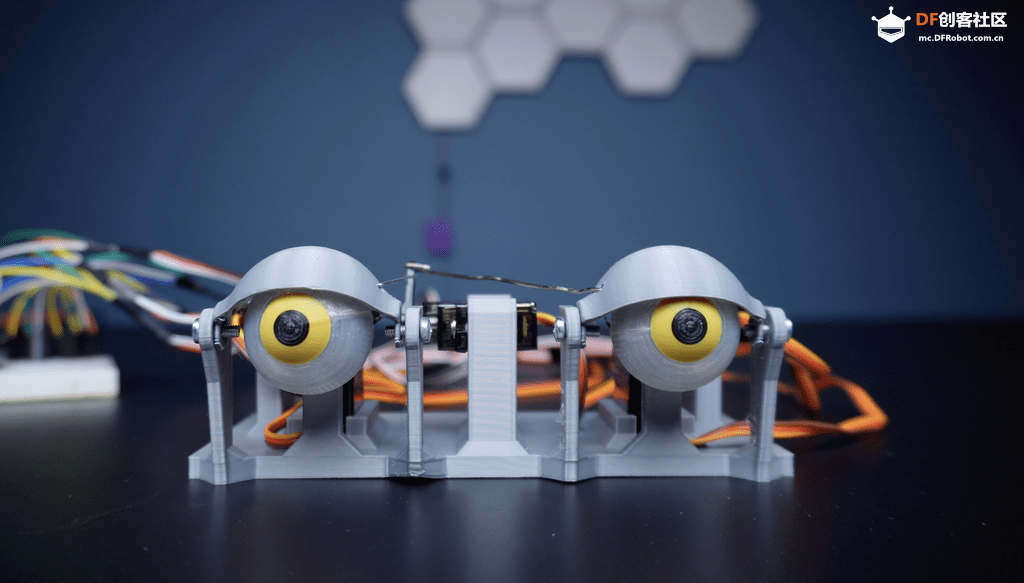 在我们继续项目的其他部分之前,先来测试一下眼睛确保一切正常。 以下是测试的简单电路设置: 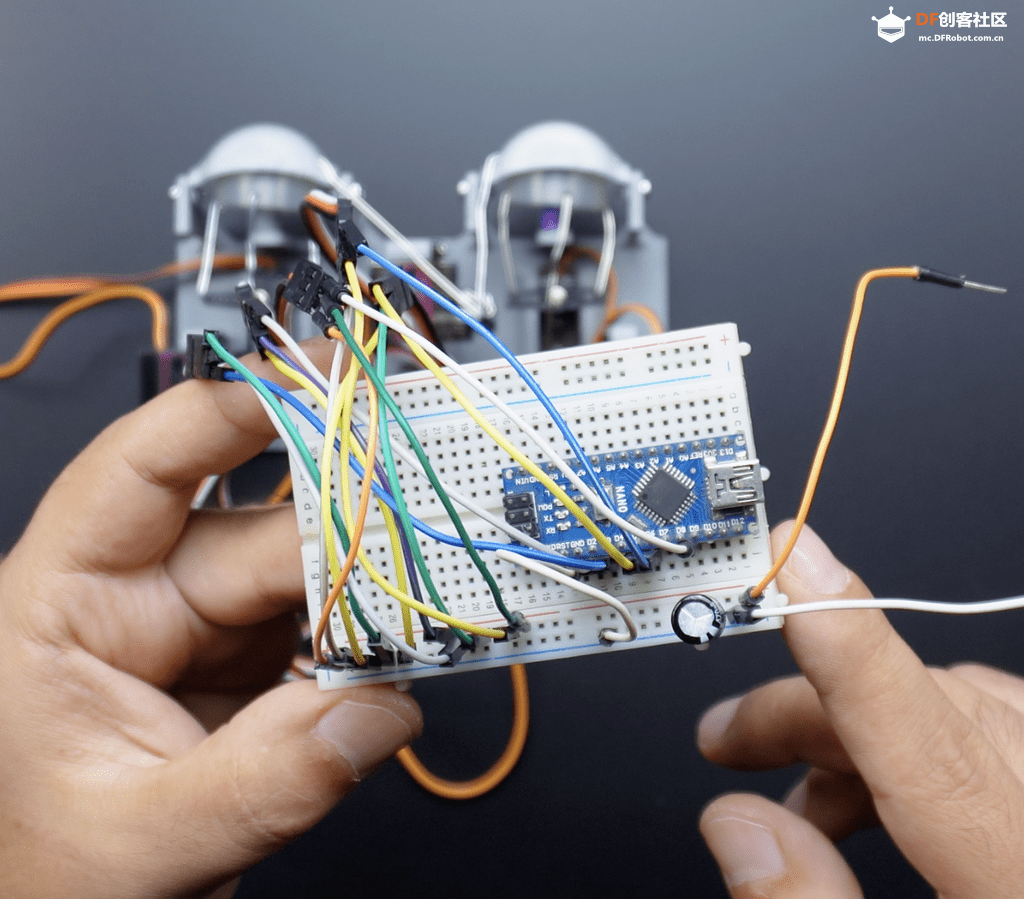 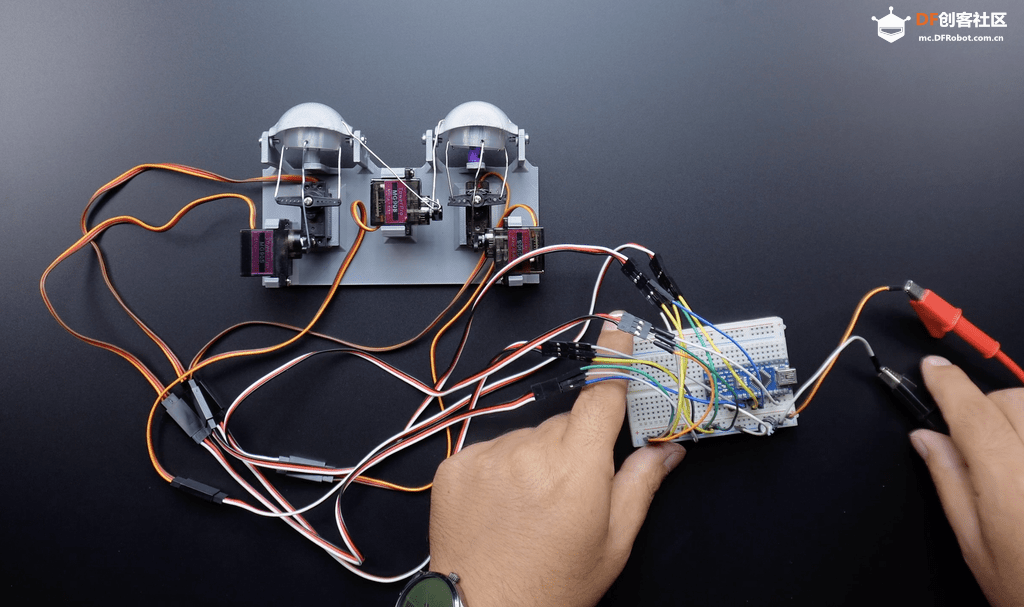
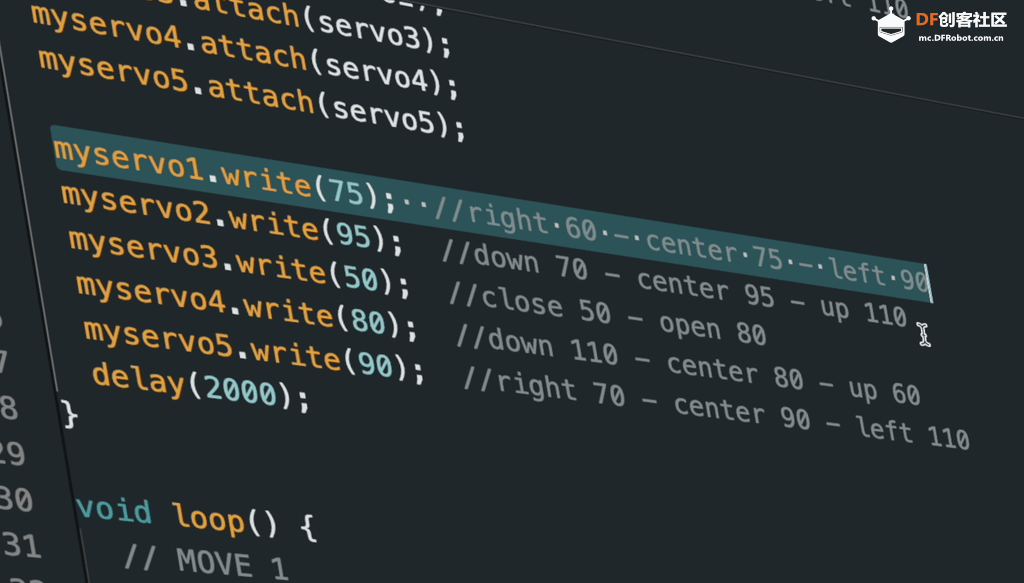 使用Arduino IDE上传代码,并观察运动。可以根据需要调整角度和延迟时间。 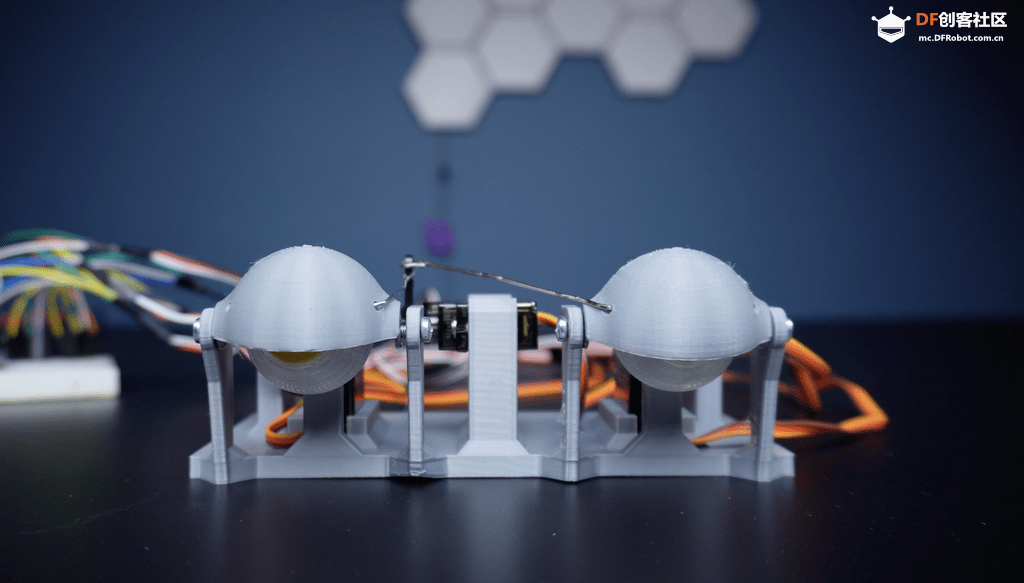 舵机连接 我们的设置第一部分涉及将五个舵机连接到Arduino Nano。这些舵机将控制以下运动:
以下是IO引脚分配:
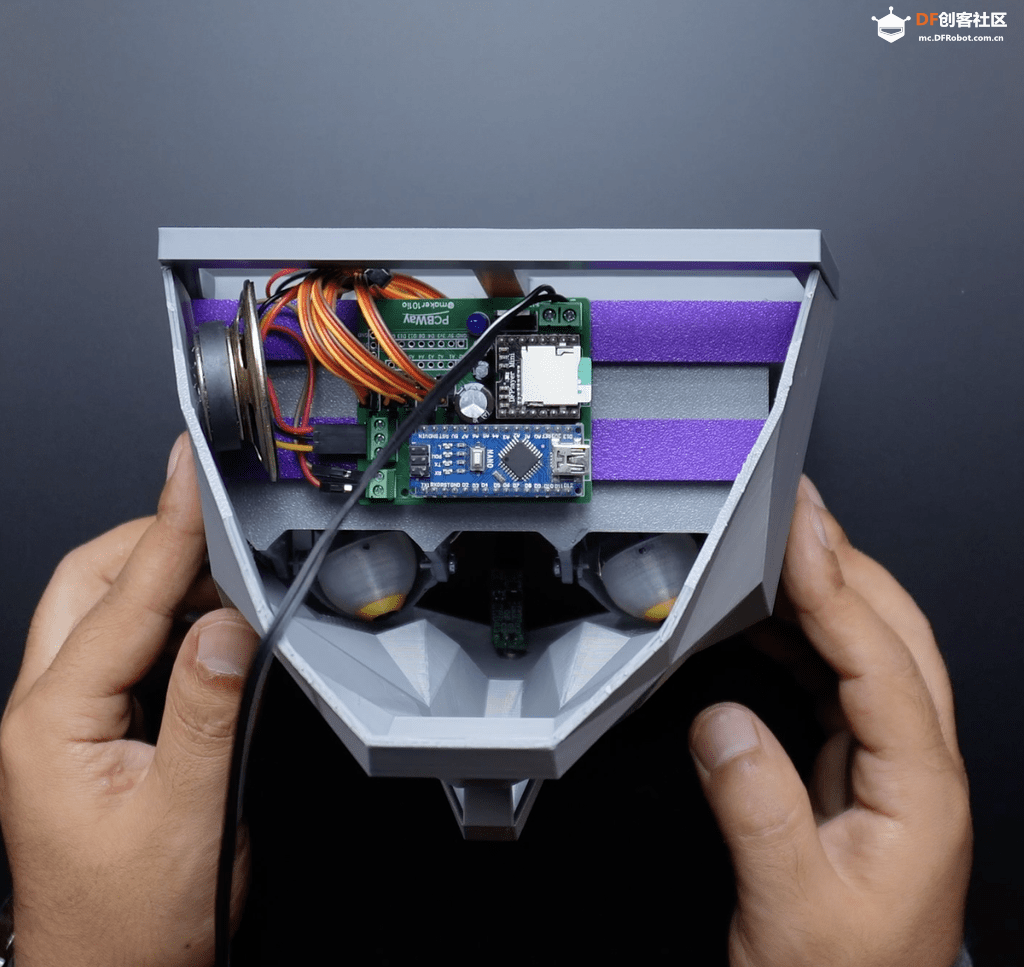
确保你的舵机有合适的外部电源供电,因为Arduino板载的5V供电不足以为多个舵机供电。 代码说明 舵机控制代码使用Servo库来管理每个舵机的运动。它定义了左右移动以及眼睑上下移动的具体角度。设置部分初始化了每个舵机,设定初始位置,并包含一个循环,以便在定义的角度之间平滑过渡。眼球的运动是根据代码中设定的条件触发,确保眼睛按照预期动作。 代码可以在文末下载。 步骤4:设计PCB 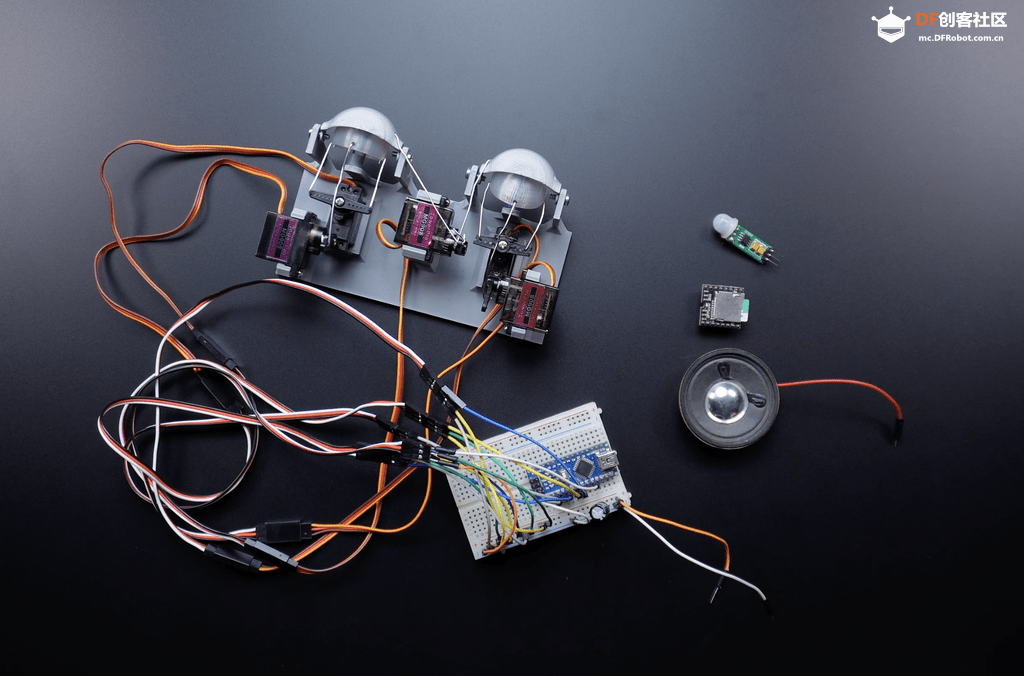 设计一块PCB来整合所有组件,包括DFPlayer、PIR传感器、舵机、扬声器和Arduino Nano。目的是创建一个更稳定的电路和原型。 组件包括:
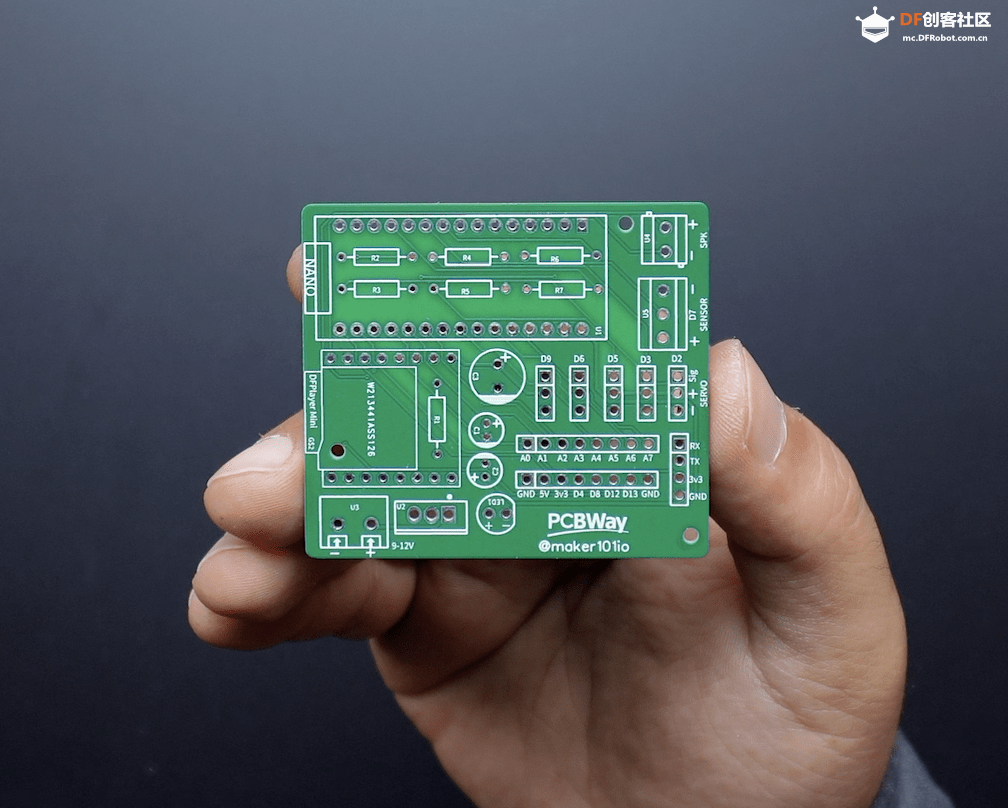 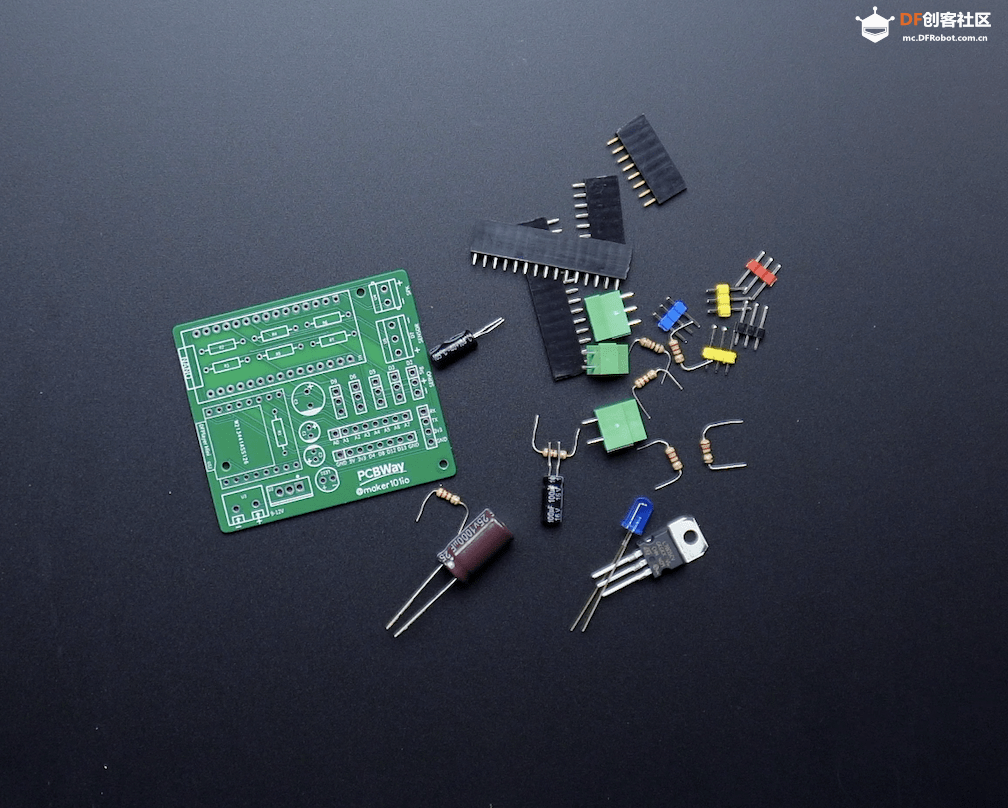 作者选择了PCBWay进行电路板制作。Gerber文件和电路原理图可以在这一链接中找到:[PCBWay项目链接](https://www.pcbway.com/project/s ... er101_c4124445.html)。如果你没有焊接经验,也可以使用PCBWay的组装PCB服务。 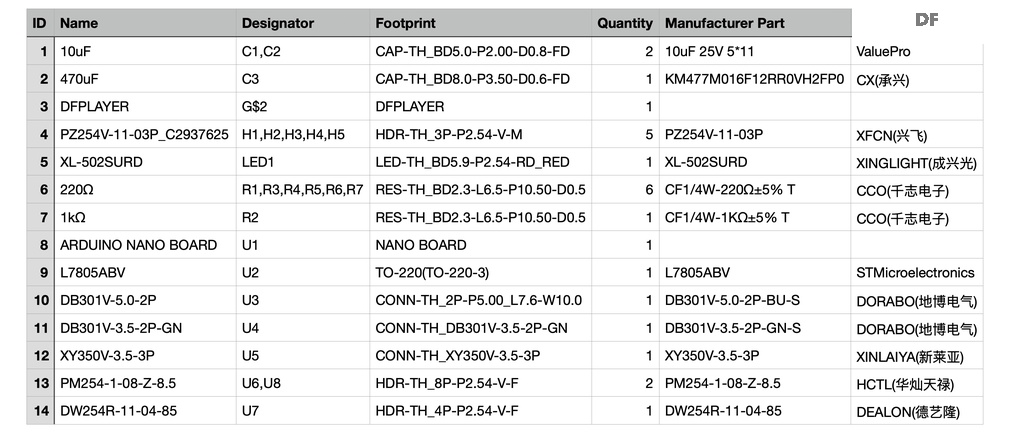 组件清单包括用于电源需求的电容、用于电机数字输入的电阻、用于传感器和扬声器的接线端,以及DFPlayer和Arduino Nano用的公母针座。
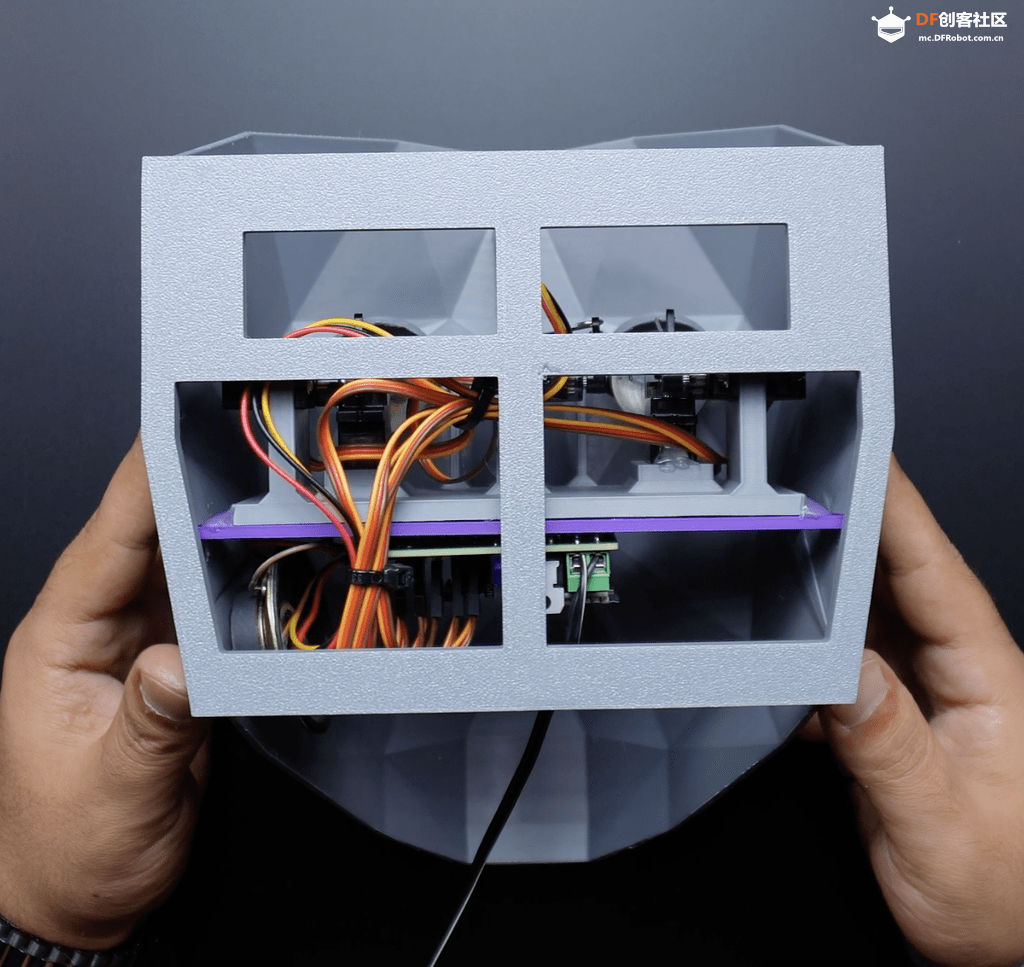
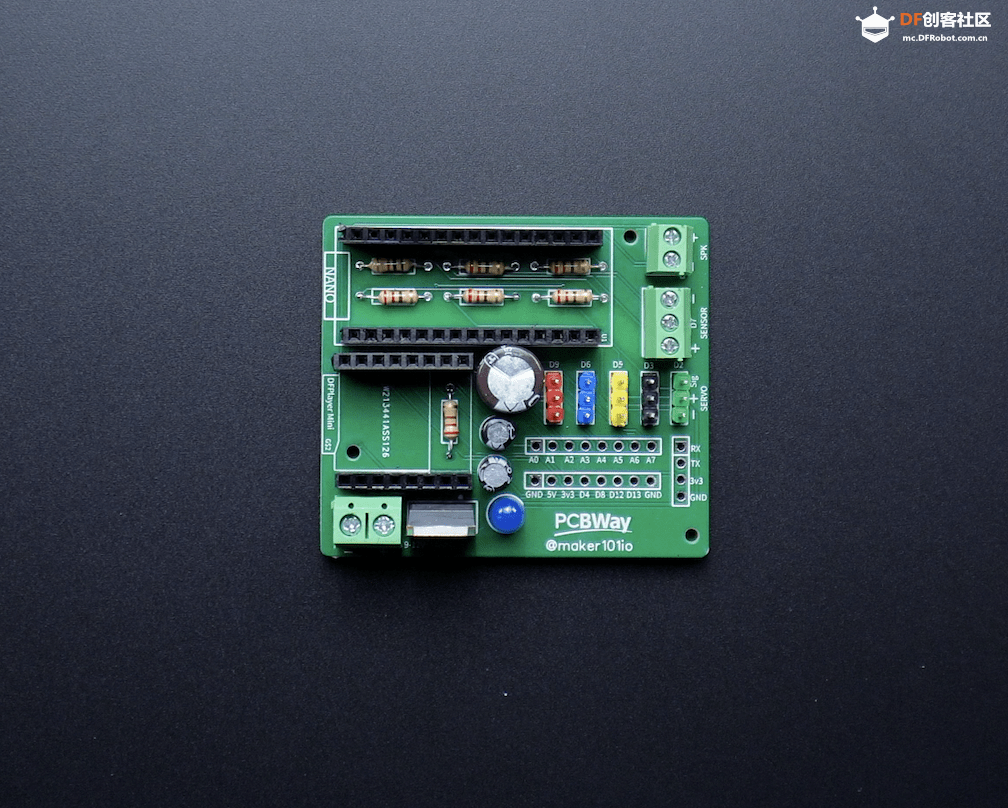 之后把所有的组件焊接到位。 步骤5:”面具“的主代码 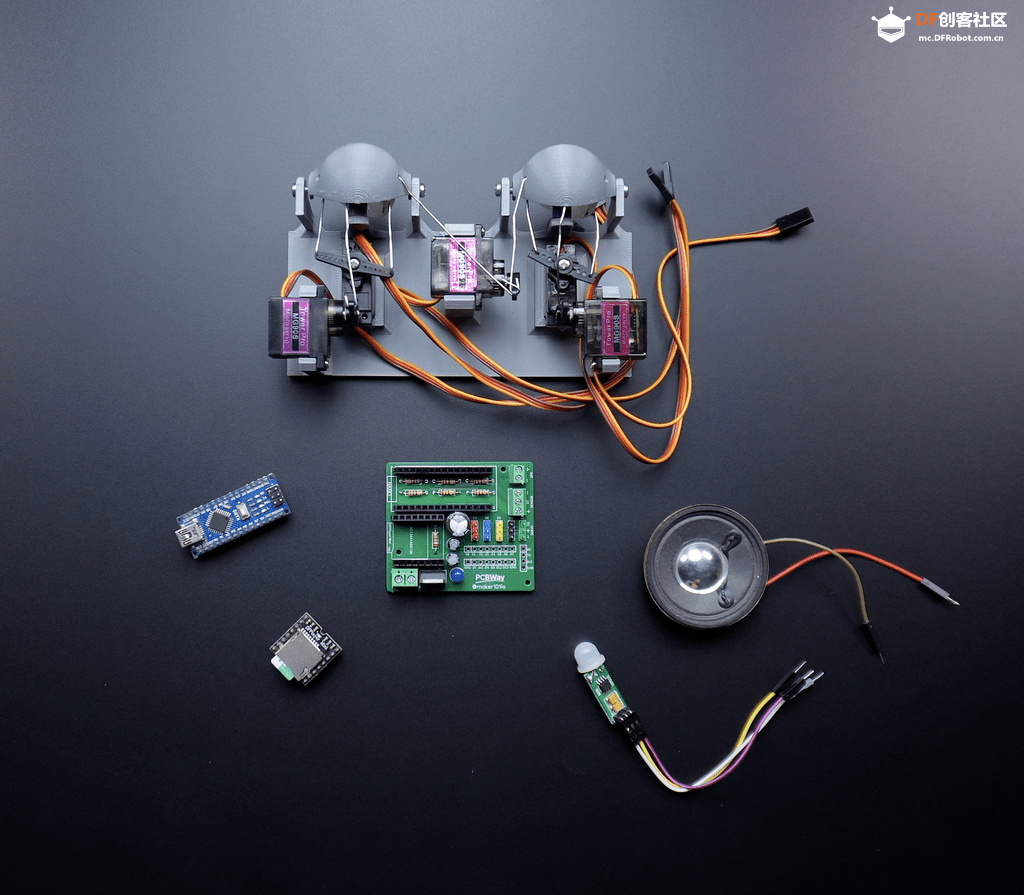 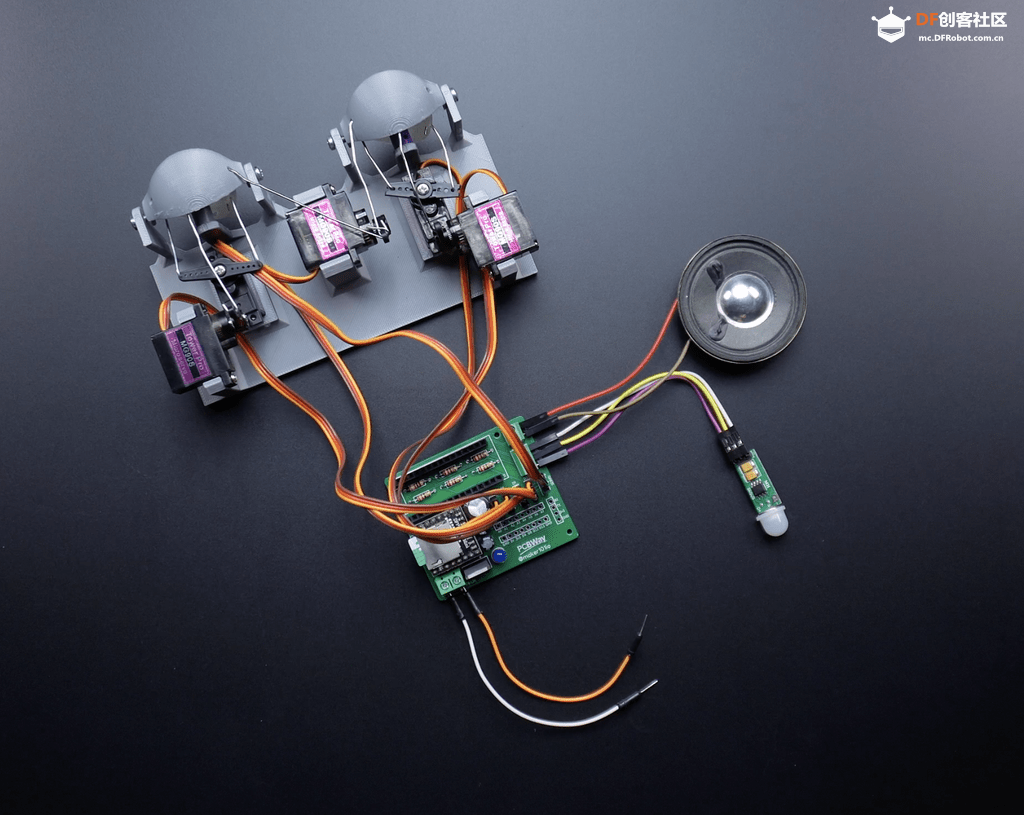 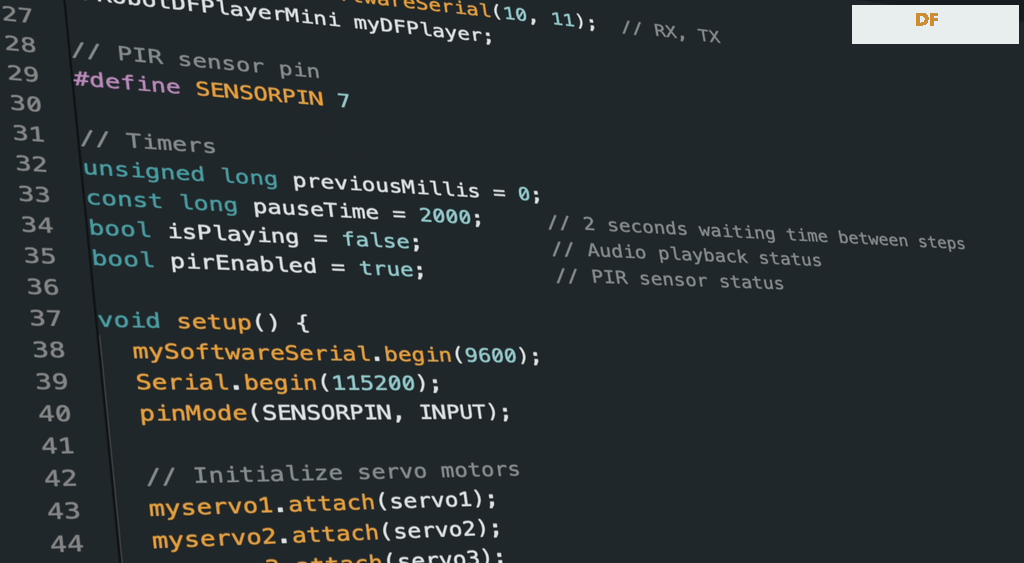 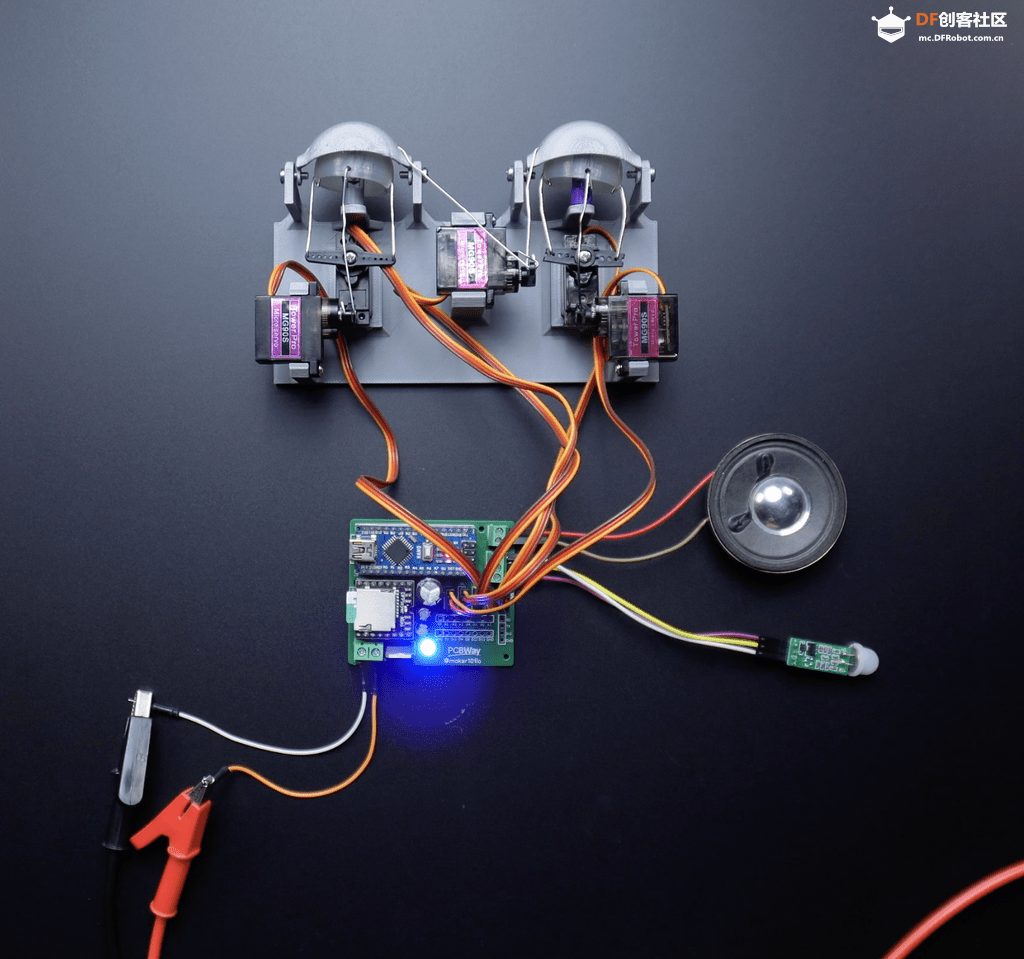 集成PIR传感器和DFPlayer 一切都安装好,接下来需要将主代码上传到Arduino Nano中。这段代码整合了PIR传感器、舵机和DFPlayer MP3模块。原理很简单:当PIR传感器检测到运动时,舵机会移动以打开眼睑并移动眼球,同时DFPlayer播放声音。 代码的关键组成部分包括:
DFPlayer Mini是一款简单、低成本的MP3播放器,可以播放存储在microSD卡上的音频文件。在这个项目中,它将在PIR传感器检测到运动时播放声音文件。
使用9V外部电源为电路供电,确保稳定性能。布线和编码完成后,就可以测试你的项目了。
主代码使用DFPlayer库来控制音频播放,同时与PIR传感器的输出进行协调。当检测到运动时,代码触发舵机移动眼睛并同时开始音频文件播放。这种同步增强了效果,使眼睛显得更加逼真。代码有效处理各种情况,确保眼球运动和声音播放之间的无缝过渡。 注意:附带文件“1.mp3”包含了项目中使用的声音“I see you(我看见你了)”。只需将音频文件上传到SD卡(SD卡格式必须为FAT32)。 文件和代码文末下载。 步骤6:最终组装 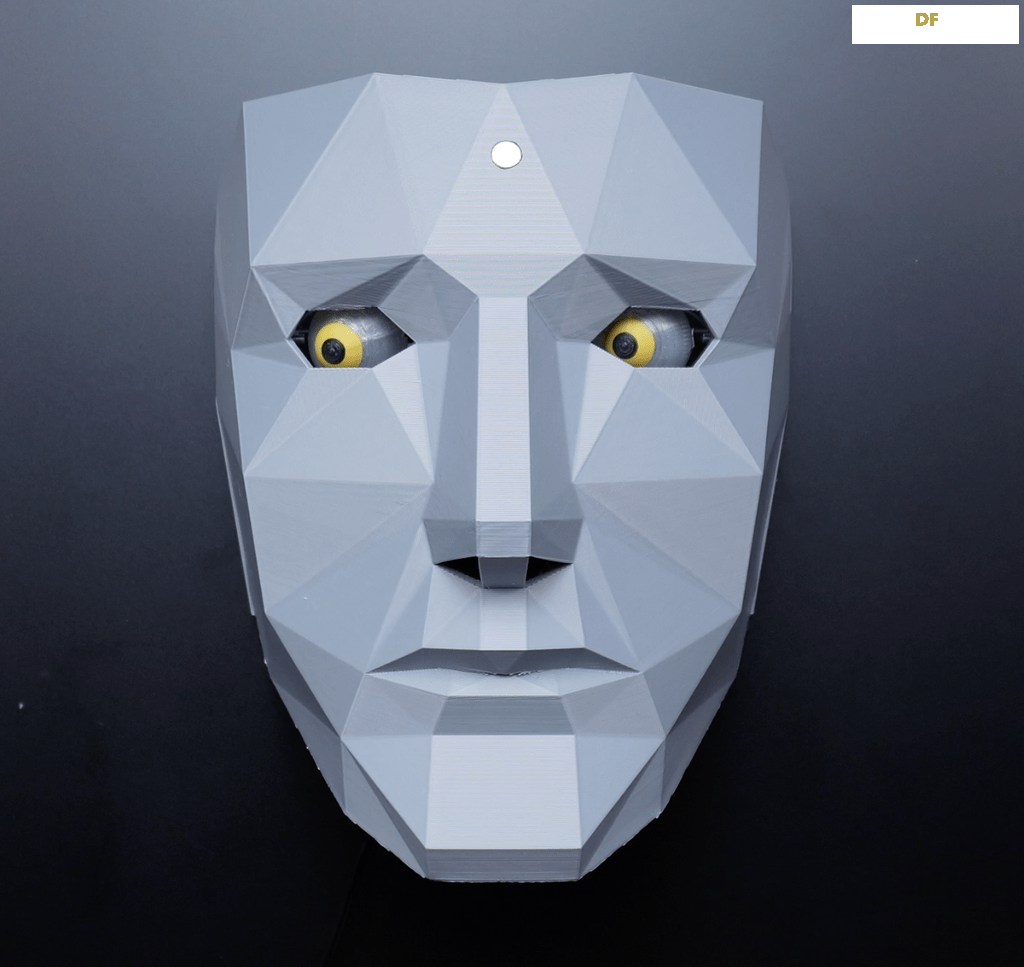 现在我们可以把所有组件组合到面具中了。 请按以下步骤操作:
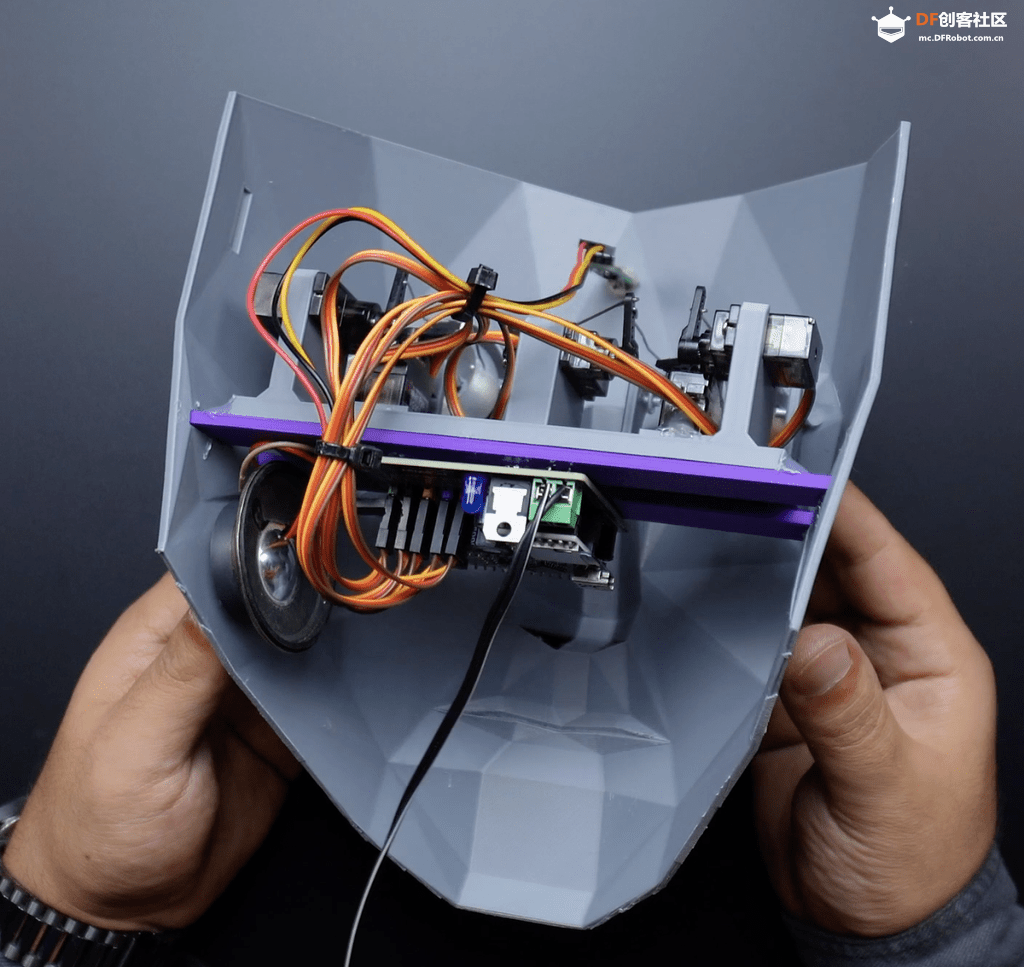 
  最后,使用双面胶或其他方法将面具安装在墙上。使用9V电源为面具供电,一切便准备就绪。 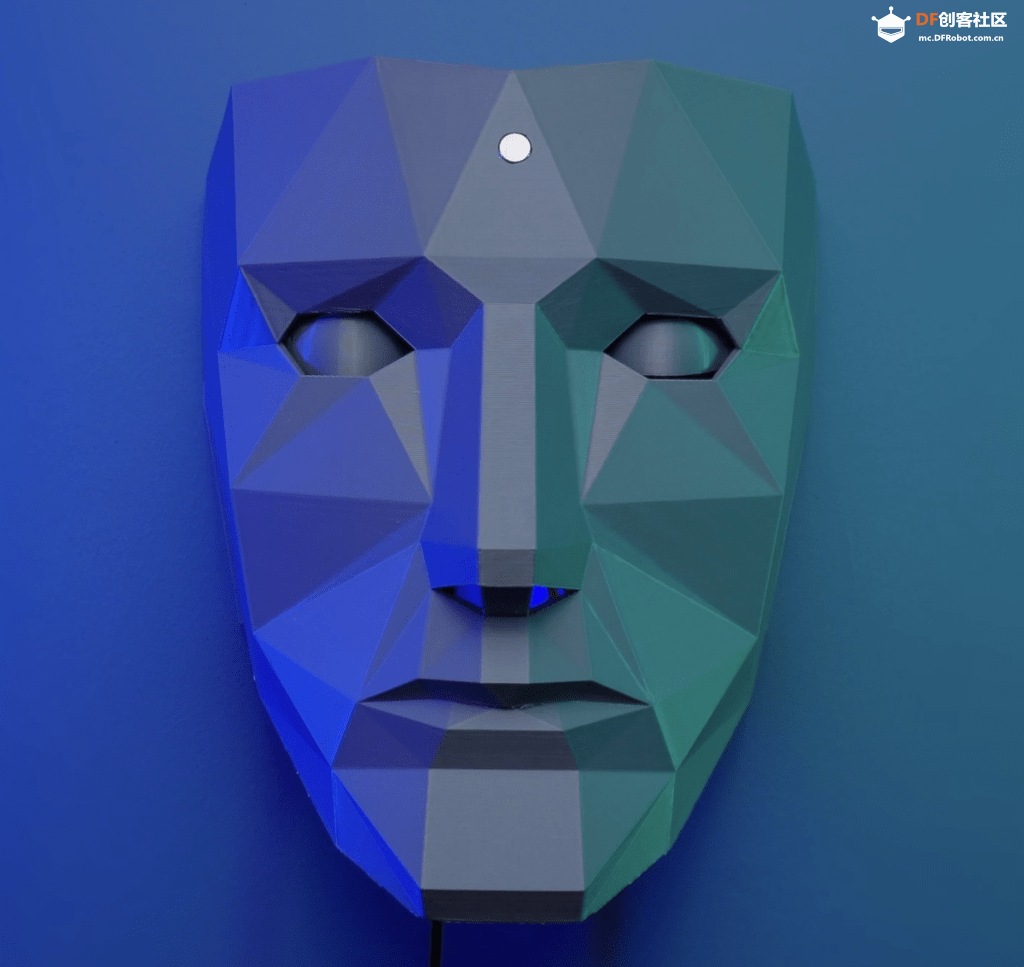 你可以根据个人喜好自定义此面具,比如添加不同的声音或更复杂的眼球动作。 如果你想让你的面具更加吸引人,还可以添加LED灯,在检测到运动时亮起来,增强视觉效果。 原文地址:https://www.instructables.com/Fa ... n-Detection-and-Vo/ 项目作者:MertArduino 译文首发于:DF创客社区 转载请注明来源信息 |

467.33 KB, 下载次数: 2517



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






