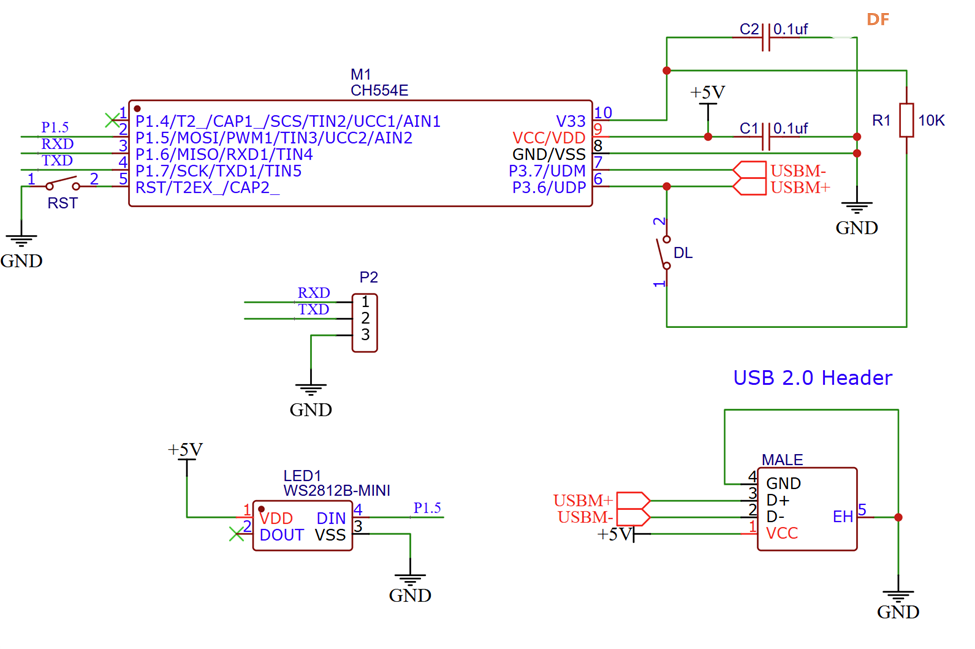
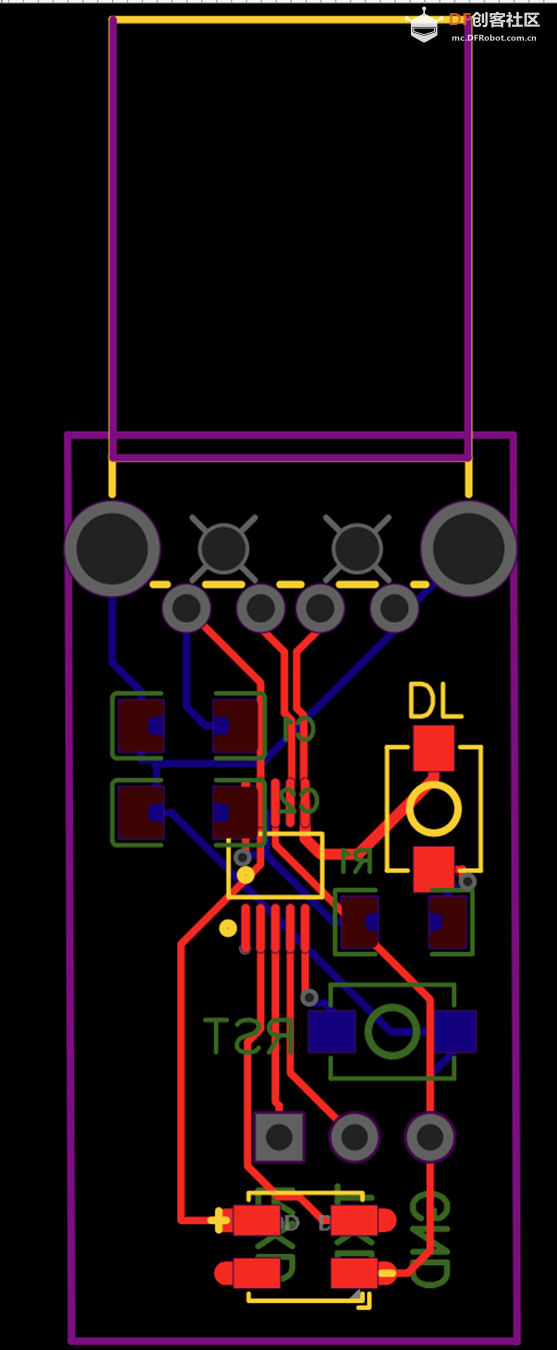
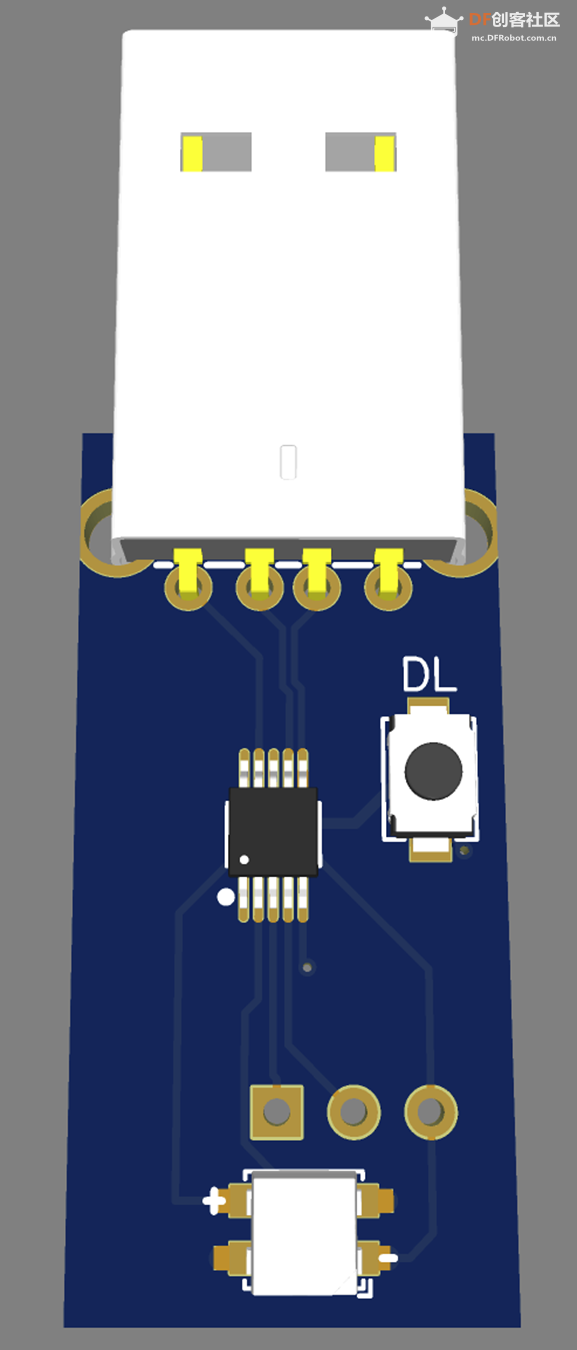
广大工矿企业在日常生产生活中,经常会遇到需要虚拟键盘和鼠标的场景。通常的解决方法是使用软件进行模拟。但是软件模拟经常会遇到安全软件误杀等等情况。为了解决这种问题,这次带来的制作是一个于CH552 开发的虚拟键盘鼠标项目。它是基于CH554 Arduino 环境开发的设备,插上之后,系统 中会出现一个 USB 串口,一个USB 键盘,一个USB 鼠标,我们将数据从串口送进设备,然后设备将收到的串口数据直接转发到键盘鼠标对应的端口上,从而实现鼠标键盘操作。 首先进行硬件的设计,电路图如下: 图片1 电路图 图片中上方是一个CH554 的最小电路图,他是WCH出品的一款兼容MCS51指令集的增强型E8051内核单片机。带有256 字节内部iRAM,可以用于快速数据暂存以及堆栈;1KB 片内xRAM,可以用于大量数据暂存以及DMA直接内存存取。16KB 容量的可多次编程的非易失存储器ROM,可以全部用于程序存储空间;或者可以分为14KB 程序存储区和2KB引导代码BootLoader/ISP程序区。更特别的是其内嵌USB 控制器和USB 收发器,支持USB-Host 主机模式和USB-Device 设备模式,支持USB type-C主从检测,支持USB 2.0全速12Mbps或者低速1.5Mbps。支持最大64字节数据包,内置FIFO,支持DMA。 这里使用的型号为CH554E, MSOP-10 封装,体积非常小便于整体设备小型化。 为了调试方便,预留了P2是UART输出。此外,还有一个 WS2812B LED 可以实现多种颜色的灯效。 PCB 设计如下: 图片2 PCB 设计 3D 预览如下 图片3 正面预览
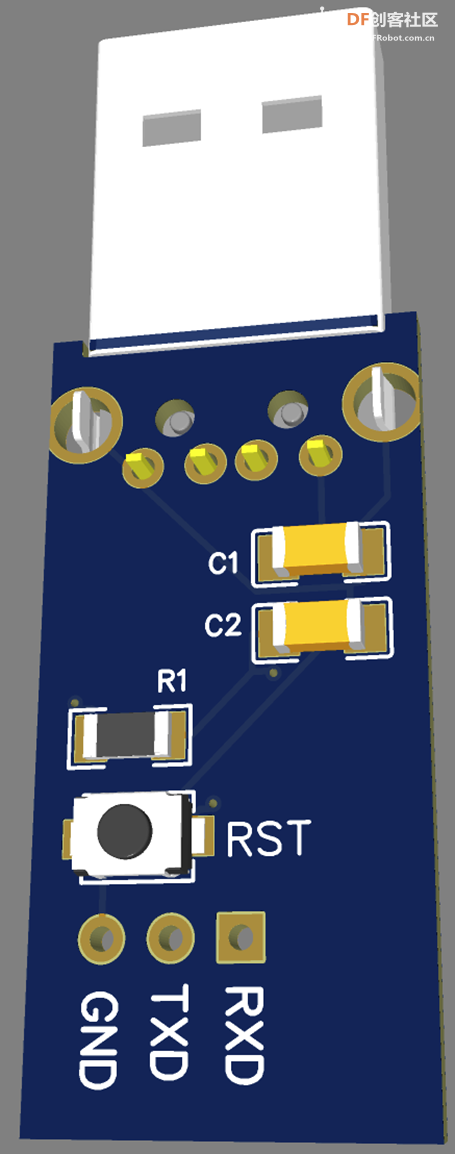
图片4 背面预览
在实际使用中,只需要焊接CH554最小系统部分即可实现USB 串口转键盘鼠标功能,其余部分可以不上件。 这次的设计尺寸是根据透明U盘外壳来的,在制作时选择 0.8mm PCB, 刚好能够放入外壳中。 硬件设计完成之后就可以进行代码的编写了。主要代码如下:
- #include <WS2812.h>
- #include "src/CdcHidCombo/USBCDC.h"
- #include "src/CdcHidCombo/USBHIDKeyboardMouse.h"
-
- #define NUM_LEDS 1
- #define COLOR_PER_LEDS 3
- #define NUM_BYTES (NUM_LEDS*COLOR_PER_LEDS)
-
- __xdata uint8_t ledData[NUM_BYTES];
-
- #define KeyboardReportID 0x01
- #define MouseReportID 0x02
- #define OnBoardLED 0x03
-
- // Data format
- // Keyboard(Total 9 bytes): 01(ReportID 01) + Keyboard data (8 Bytes)
- // Mouse(Total 5 bytes): 02(ReportID 02) + Mouse Data (4 Bytes)
- uint8_t recvStr[9];
- uint8_t recvStrPtr = 0;
- unsigned long Elsp;
-
- void setup() {
- USBInit();
- Serial0_begin(115200);
- delay(1000);
- Serial0_print("start");
- Elsp=0;
- }
-
- void loop() {
- while (USBSerial_available()) {
- uint8_t serialChar = USBSerial_read();
- recvStr[recvStrPtr++] = serialChar;
- if (recvStrPtr == 10) {
- for (uint8_t i = 0; i < 9; i++) {
- Serial0_write(recvStr[i]);
- }
- if (recvStr[0] == KeyboardReportID) { // Keyboard
- USB_EP3_send(recvStr, 9);
- }
- if (recvStr[0] == MouseReportID) {
- USB_EP3_send(recvStr, 5); // Mouse
- }
- if (recvStr[0] == OnBoardLED) {
- set_pixel_for_GRB_LED(ledData, 0, recvStr[0], recvStr[1], recvStr[2]);
- neopixel_show_P1_5(ledData, NUM_BYTES);
- }
- recvStrPtr = 0;
- }
- Elsp=millis();
- }
- // If there is no data in 100ms, clear the receive buffer
- if (millis()-Elsp>100) {
- recvStrPtr = 0;
- Elsp=millis();
- }
- }
每次收取10字节串口数据,如果第一字节为KeyboardReportID,那么直接将9个字节从端点3发送给主机;如果第一字节是MouseReportID,那么直接将5个字节从端点3发送给主机;如果第一字节为 OnBoardLED,那么将后续3个字节合成为一个颜色信息,然后通过neopixel_show_P1_5() 函数将数据从 P1.5 引脚发送给WS2812。 USB 设备信息在USBconstant.c文件中有描述。其中包含了USB CDC 设备/USB 键盘/USB鼠标的描述符。其中的USB 键盘/USB鼠标使用端点3 OUTPUT。 对于键盘鼠标的HID 描述符,在USBconstant.c文件的ReportDescriptor[]的结构体中。使用的是标准的键盘鼠标描述符。 键盘数据为8字节长:
鼠标数据为4字节长:
需要特别注意的是:键盘鼠标都是通过端点3发送给主机的,他们使用 Report ID 进行区分,在 ReportDescriptor[]中有如下定义: - 0x09, 0x06, // USAGE (Keyboard)
- 0xa1, 0x01, // COLLECTION (Application)
- 0x85, 0x01, // REPORT_ID (1)
- 0x05, 0x07, // USAGE_PAGE (Keyboard)
- 0x19, 0xe0, // USAGE_MINIMUM (Keyboard LeftControl)
- …….
- 0x09, 0x02, // USAGE (Mouse)
- 0xa1, 0x01, // COLLECTION (Application)
- 0x09, 0x01, // USAGE (Pointer)
- 0xa1, 0x00, // COLLECTION (Physical)
- 0x85, 0x02, // REPORT_ID (2)
- 0x05, 0x09, // USAGE_PAGE (Button)
就是说,设备通过端点3发送给主机的数据,如果是 0x01+ 8个字节的数据,主机会当作键盘数据来处理;如果是0x02+4个字节的数据,主机则会当作鼠标数据来处理。 上面的代码中,USB串口,收到数据之后,将9字节和5字节发送给主机即可实现键盘和鼠标的操作了。 端点3的发送代码在 USB_EP3_send()函数中,可以看到对于CH554 来说,USB的发送操作非常明确简单,要发送的数据直接填充到Ep3Buffer[]中,然后设定 UEP3_T_LEN 寄存器要发送的数据长度,再设定 UEP3_CTRL 寄存器就完成了了发送。这对于USB初学者非常友好,代码直接对应硬件动作,通俗易懂。
- // 将所有数据放入 EP3 准备发送
- for (__data uint8_t i = 0; i < Len; i++) { // load data for upload
- Ep3Buffer[i] = Data[i];
- }
-
- UEP3_T_LEN = Len; // data length
- UpPoint3_Busy = 1;
- UEP3_CTRL = UEP3_CTRL & ~MASK_UEP_T_RES |
- UEP_T_RES_ACK; // upload data and respond ACK
上位机代码: - // CDC_vKBMSTest.cpp : This file contains the 'main' function. Program execution begins and ends there.
- //
-
- #include <windows.h>
- #include <SetupAPI.h>
- #include <tchar.h>
- #include <iostream>
- #include <cstring>
- #include <atlstr.h>
-
- #pragma comment(lib, "Setupapi.lib")
-
- #define MY_USB_PID_VID _T("VID_1209&PID_C55C")
-
- class ComPortException : public std::exception {
- public:
- ComPortException(DWORD errorCode) : errorCode(errorCode) {}
-
- DWORD getErrorCode() const {
- return errorCode;
- }
-
- private:
- DWORD errorCode;
- };
-
- // 对串口portName 发送数据
- // 无法打开串口返回 1
- // 无法设置串口参数 2
- void SendToComPort(const int port, const char* data) {
- int Result = 0;
- HANDLE hCom = INVALID_HANDLE_VALUE;
- TCHAR portName[10]; // 用于存储 "COMp" 字符串
-
- // 将整数 p 转换为 "COMp" 字符串
- #ifdef UNICODE
- swprintf(portName, 10, _T("\\\\.\\COM%d"), port);
- #else
- sprintf(portName, "COM%d", port);
- #endif
- try {
- // 打开串口
- hCom = CreateFile(portName,
- GENERIC_READ | GENERIC_WRITE,
- 0,
- NULL,
- OPEN_EXISTING,
- 0,
- NULL);
-
- if (hCom == INVALID_HANDLE_VALUE) {
- throw ComPortException(GetLastError());
- }
-
- // 设置串口参数
- DCB dcb;
- SecureZeroMemory(&dcb, sizeof(DCB));
- dcb.DCBlength = sizeof(DCB);
-
- if (!GetCommState(hCom, &dcb)) {
- throw ComPortException(GetLastError());
- }
-
- dcb.BaudRate = CBR_115200; // 波特率
- dcb.ByteSize = 8; // 数据位
- dcb.StopBits = ONESTOPBIT; // 停止位
- dcb.Parity = NOPARITY; // 校验位
-
- if (!SetCommState(hCom, &dcb)) {
- throw ComPortException(GetLastError());
- }
-
- // 设置超时参数
- COMMTIMEOUTS timeouts;
- timeouts.ReadIntervalTimeout = 50;
- timeouts.ReadTotalTimeoutConstant = 50;
- timeouts.ReadTotalTimeoutMultiplier = 10;
- timeouts.WriteTotalTimeoutConstant = 50;
- timeouts.WriteTotalTimeoutMultiplier = 10;
-
- if (!SetCommTimeouts(hCom, &timeouts)) {
- throw ComPortException(GetLastError());
- }
-
- // 发送数据
- DWORD bytesWritten;
- if (!WriteFile(hCom, data, 10, &bytesWritten, NULL)) {
- std::cerr << "Failed to write to COM port." << std::endl;
- }
- else {
- std::cout << "Successfully sent data to COM port: [" << port << "]" << std::endl;
- }
- // 关闭串口
- if (hCom != INVALID_HANDLE_VALUE) {
- CloseHandle(hCom);
- }
- }
- catch (const ComPortException& ex) {
- std::cerr << "Error: " << ex.getErrorCode() << std::endl;
- if (hCom != INVALID_HANDLE_VALUE) {
- CloseHandle(hCom);
- }
- }
-
- }
-
- /************************************************************************/
- /* 根据USB描述信息字符串中读取
- /************************************************************************/
- int MTGetPortFromVidPid(CString strVidPid)
- {
- // 获取当前系统所有使用的设备
- int nPort = -1;
- int nStart = -1;
- int nEnd = -1;
- int i = 0;
- CString strTemp, strName;
- DWORD dwFlag = (DIGCF_ALLCLASSES | DIGCF_PRESENT);
- HDEVINFO hDevInfo = INVALID_HANDLE_VALUE;
- SP_DEVINFO_DATA sDevInfoData;
- TCHAR szDis[2048] = { 0x00 };// 存储设备实例ID
- TCHAR szFN[MAX_PATH] = { 0x00 };// 存储设备实例属性
- DWORD nSize = 0;
-
- // 准备遍历所有设备查找USB
- hDevInfo = SetupDiGetClassDevs(NULL, L"USB", NULL, dwFlag);
- if (INVALID_HANDLE_VALUE == hDevInfo)
- goto STEP_END;
-
- // 开始遍历所有设备
- memset(&sDevInfoData, 0x00, sizeof(SP_DEVICE_INTERFACE_DATA));
- sDevInfoData.cbSize = sizeof(SP_DEVINFO_DATA);
- for (i = 0; SetupDiEnumDeviceInfo(hDevInfo, i, &sDevInfoData); i++)
- {
- nSize = 0;
-
- // 无效设备
- if (!SetupDiGetDeviceInstanceId(hDevInfo, &sDevInfoData, szDis, sizeof(szDis), &nSize))
- goto STEP_END;
-
- // 根据设备信息寻找VID PID一致的设备
- strTemp.Format(_T("%s"), szDis);
- strTemp.MakeUpper();
- if (strTemp.Find(strVidPid, 0) == -1)
- continue;
-
- // 查找设备属性
- nSize = 0;
- SetupDiGetDeviceRegistryProperty(hDevInfo, &sDevInfoData,
- SPDRP_FRIENDLYNAME,
- 0, (PBYTE)szFN,
- sizeof(szFN),
- &nSize);
-
- // "XXX Virtual Com Port (COM7)"
- strName.Format(_T("%s"), szFN);
- if (strName.IsEmpty())
- //goto STEP_END;
- continue;
-
- // 寻找串口信息
- nStart = strName.Find(_T("(COM"), 0);
- nEnd = strName.Find(_T(")"), 0);
- if (nStart == -1 || nEnd == -1)
- //goto STEP_END;
- continue;
-
- strTemp = strName.Mid(nStart + 4, nEnd - nStart - 2);
- nPort = _ttoi(strTemp);
-
- }
- STEP_END:
-
- // 关闭设备信息集句柄
- if (hDevInfo != INVALID_HANDLE_VALUE)
- {
- SetupDiDestroyDeviceInfoList(hDevInfo);
- hDevInfo = INVALID_HANDLE_VALUE;
- }
-
- return nPort;
- }
-
- int main()
- {
- int Port;
- char Data[10];
- printf("Virutal KB MS Test\n");
- Port = MTGetPortFromVidPid(MY_USB_PID_VID);
- if (Port == -1) {
- printf("No device is found\n");
- goto EndProgram;
- }
- else {
- printf("Found COM%d\n",Port);
- }
- Sleep(5000);
-
- // 测试鼠标移动
- memset(Data,0,sizeof(Data));
- Data[0] = 2; // 鼠标
- Data[2] = 50;
- SendToComPort(Port,(char *)&Data);
- Sleep(300);
- Data[2] = 0; Data[3] = 50;
- SendToComPort(Port, (char*)&Data);
- Sleep(300);
- Data[2] = -50; Data[3] = 0x00;
- SendToComPort(Port, (char*)&Data);
- Sleep(300);
- Data[2] = 0; Data[3] = -50;
- SendToComPort(Port, (char*)&Data);
- Sleep(300);
-
- // 测试键盘数据
- memset(Data, 0, sizeof(Data));
- Data[0] = 1; // 键盘
- // 发送GUI信息
- Data[1] = 0x08;
- SendToComPort(Port, (char*)&Data);
- Sleep(1000);
- memset(Data, 0, sizeof(Data));
- Data[0] = 1; // 键盘
- SendToComPort(Port, (char*)&Data);
- Sleep(300);
-
- // 测试键盘数据
- memset(Data, 0, sizeof(Data));
- Data[0] = 1; // 键盘
- // 发送按键信息
- Data[2] = 0x04;
- Data[3] = 0x0F; //'l'
- Data[4] = 0x04; //'a '
- Data[5] = 0x05; //'b'
- Data[6] = 0x1d; //'z'
- SendToComPort(Port, (char*)&Data);
- Sleep(300);
- memset(Data, 0, sizeof(Data));
- Data[0] = 1; // 键盘
- // 抬起按键
- SendToComPort(Port, (char*)&Data);
- Sleep(300);
-
-
-
- // 测试LED
- memset(Data, 0, sizeof(Data));
- Data[0] = 3; // LED
- Data[1] = 0xFF;
- SendToComPort(Port, (char*)&Data);
- Sleep(500);
- memset(Data, 0, sizeof(Data));
- Data[0] = 3; // LED
- Data[2] = 0xFF;
- SendToComPort(Port, (char*)&Data);
- Sleep(500);
- memset(Data, 0, sizeof(Data));
- Data[0] = 3; // LED
- Data[3] = 0xFF;
- SendToComPort(Port, (char*)&Data);
- Sleep(500);
- memset(Data, 0, sizeof(Data));
- Data[0] = 3; // LED
- SendToComPort(Port, (char*)&Data);
- Sleep(500);
-
- EndProgram:
- printf("End\n");
- }
工作的测试视频在:
https://www.bilibili.com/video/BV1k8k4YxE8s/
|
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







