|
12508| 0
|
[大脑洞] 激光雕刻柔性电路、双臂协作机器人|DF创客周刊(第1... |

|
本帖最后由 RRoy 于 2025-3-27 17:05 编辑 社区公众号记录每周值得分享的创客相关内容,每周五发布~ 欢迎投稿或推荐相关内容。 投稿邮箱:MakerCommunity@outlook.com 激光雕刻柔性电路 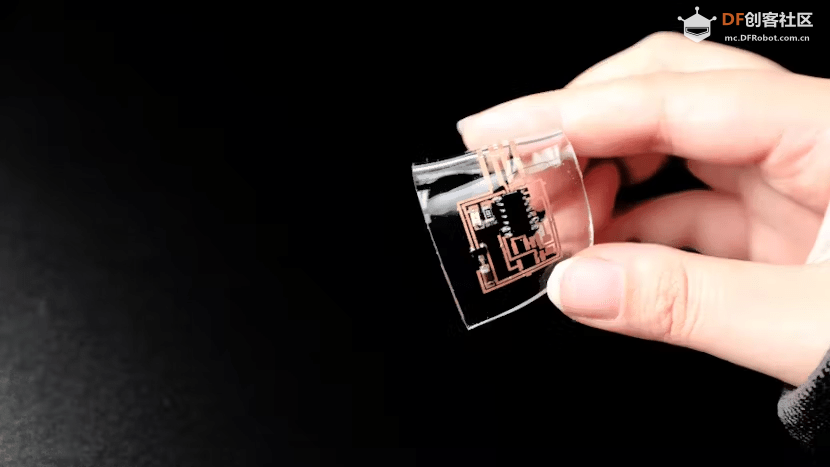 这是麻省理工学院(MIT)研究团队开发的一项突破性技术,名为E-LIG,它使用激光在柔性基板上直接创建功能完整的电子电路。与传统的减法制造工艺不同,E-LIG采用激光诱导石墨化(LIG)技术在基板表面形成导电层,然后通过电镀铜的方式构建高精度电路。 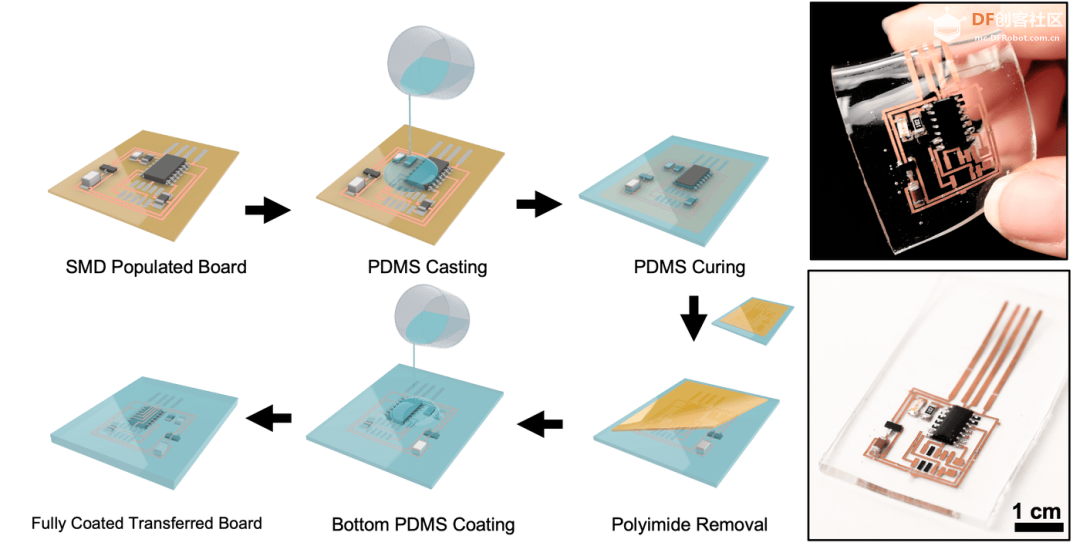 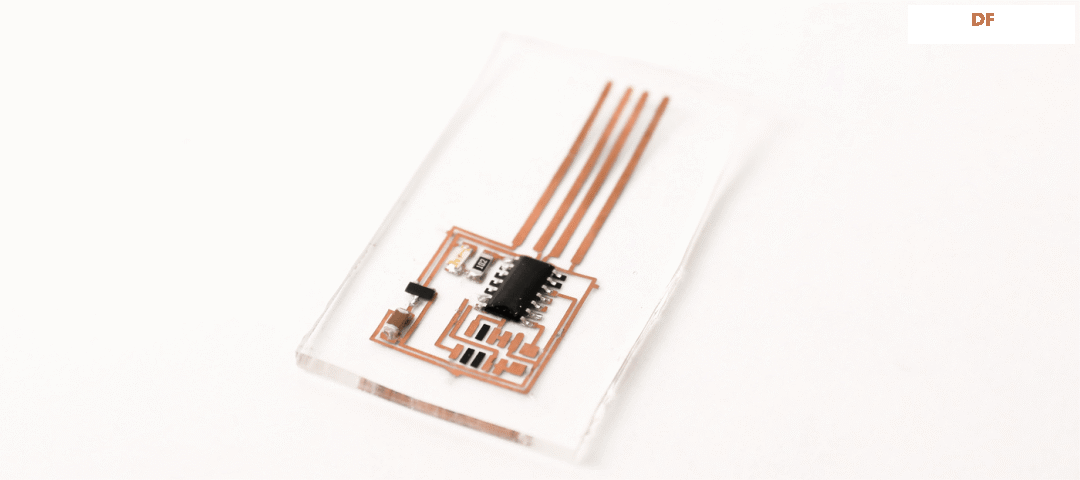 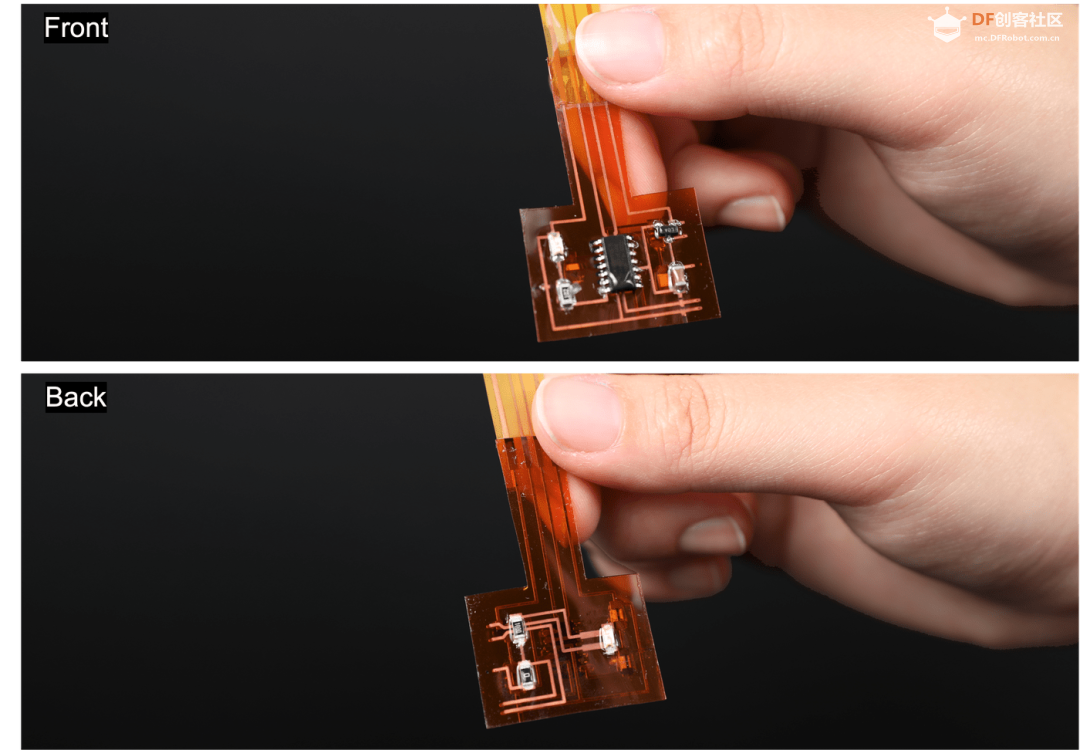 这项技术能在单一柔性透明基板上集成传感器和执行器,无需复杂的组装过程。研究团队已成功演示了多种应用原型,包括电流限制电阻器、柔性应变传感器、压力感应系统、加热器和电热执行器等。更令人印象深刻的是,这种技术支持电路修复,提高了产品的耐用性,同时为可穿戴设备、软体机器人和交互式表面等领域提供了一种可扩展、成本效益高的解决方案。 来源:https://www.media.mit.edu/projects/e-lig/overview/ 掌上AI助手:ESP32迷你聊天机器人 这个项目展示了如何利用小巧精致的Beetle ESP32 C6开发板打造一个功能完善的AI聊天机器人。通过连接WiFi并创建Web服务器,该项目能够调用DeepSeek-R1大语言模型API,实现智能问答功能。 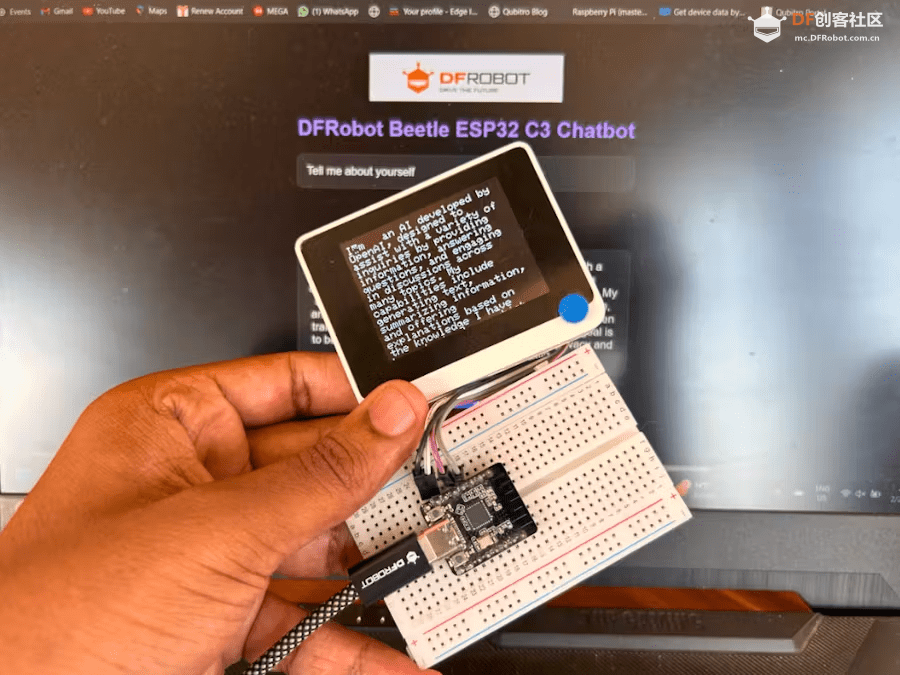 项目的亮点在于它的紧凑性和实用性 - 仅使用一块硬币大小的ESP32开发板就能构建出一个完整的AI助手。用户可以通过手机或电脑浏览器访问设备的Web界面提问,系统会实时处理并显示AI回答。如果配合Wio Terminal显示屏,还能将回答内容直观地展示出来,让交互体验更加丰富。  项目设计了深色主题Web界面,并通过LED指示灯提供视觉反馈,是一个将人工智能、物联网和嵌入式系统结合的创客项目,适合想要入门AI应用开发的爱好者尝试。 来源:https://www.hackster.io/pradeepl ... tle-esp32-c6-6b7fe0 智能气动打地鼠游戏 这是一款结合了传感器与经典街机游戏的智能气动打地鼠装置。通过XMC微控制器和多种传感器,将传统打地鼠游戏提升到了一个全新的技术高度。  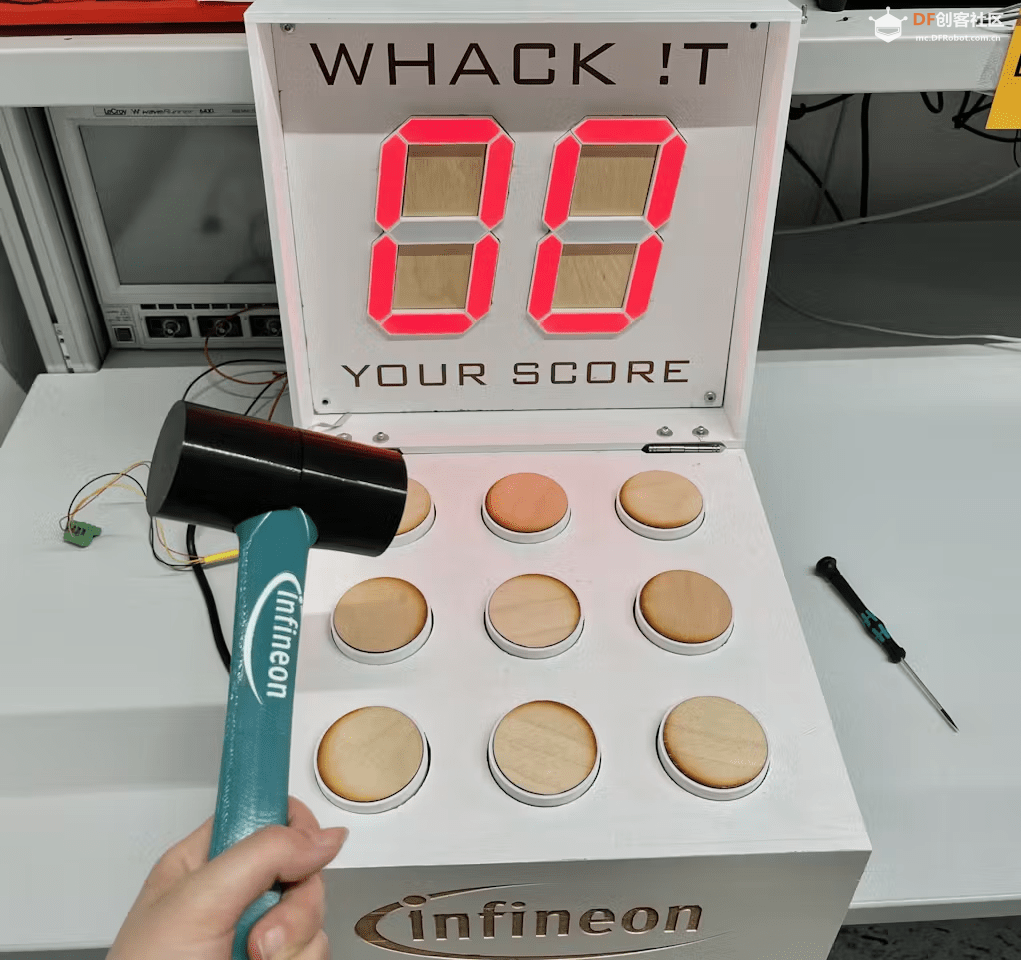  游戏采用气动系统驱动9个活塞作为"地鼠",玩家需要用3D打印的智能锤击打随机弹出的活塞。与传统机械开关不同,这款游戏使用了英飞凌的TLE493D磁场传感器进行精确的击打检测,大大提高了游戏的响应速度和准确性。 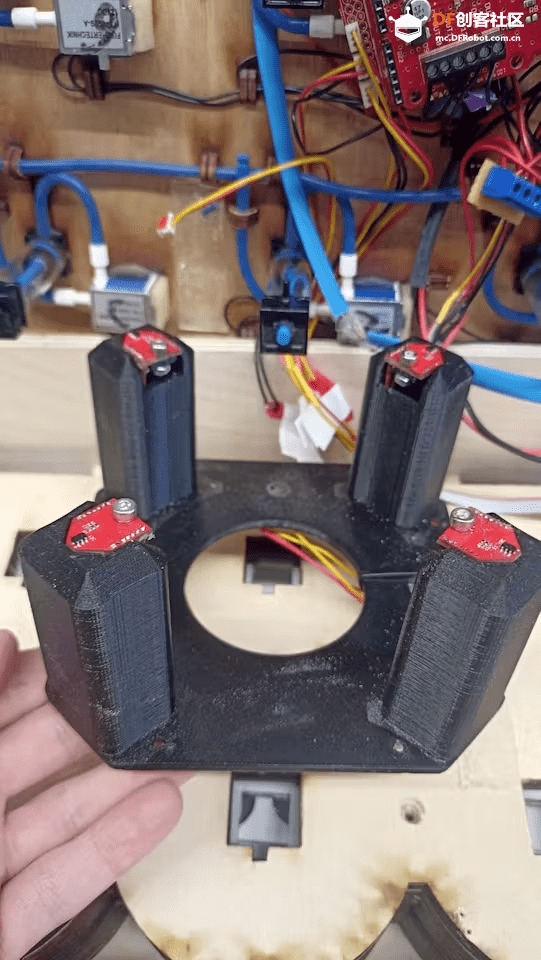  游戏的亮点在于其智能化设计:锤子内置DPS368压力传感器,能够自动检测锤子被抬起的动作来启动游戏;OPTIGA™ TrustM安全芯片负责随机化活塞弹出的时间和位置;TLE94112ES 12路半桥芯片控制所有气动阀门,实现了单芯片控制多活塞的功能。 整个游戏装置由激光切割的木箱和3D打印部件组成,是一个非常不错的展示创客能力的互动项目。 来源:https://www.hackster.io/Infineon ... -for-arduino-eba739 双臂协作机器人:基于NVIDIA Isaac-GR00T N1模型的智能拾取分拣系统 这个项目利用两台LeRobot SO-100 ARM机械臂,结合NVIDIA最新发布的Isaac-GR00T N1视觉-语言-动作模型,实现了双臂协作的智能拾取与分拣任务。  项目通过人工示范操作(远程操作)来训练机器人,让它们能够理解并执行自然语言指令。每个机械臂都配备了Arducam摄像头用于视觉处理,同时还有一个外部摄像头记录整个工作场景。这种设置使机器人能够从真实世界的示范中学习,并逐步掌握协作完成任务的能力。 目前项目仍在进行中,其创新性在于尝试将最新的视觉语言动作模型应用于双臂协作场景,为未来的机器人协作任务开辟了新的可能性。团队还将相关数据集上传到了Hugging Face,鼓励更多开发者参与并推动这一领域的创新发展。 来源:https://www.hackster.io/firebrea ... aac-gr00t-n1-458189 自平衡双轮机器人 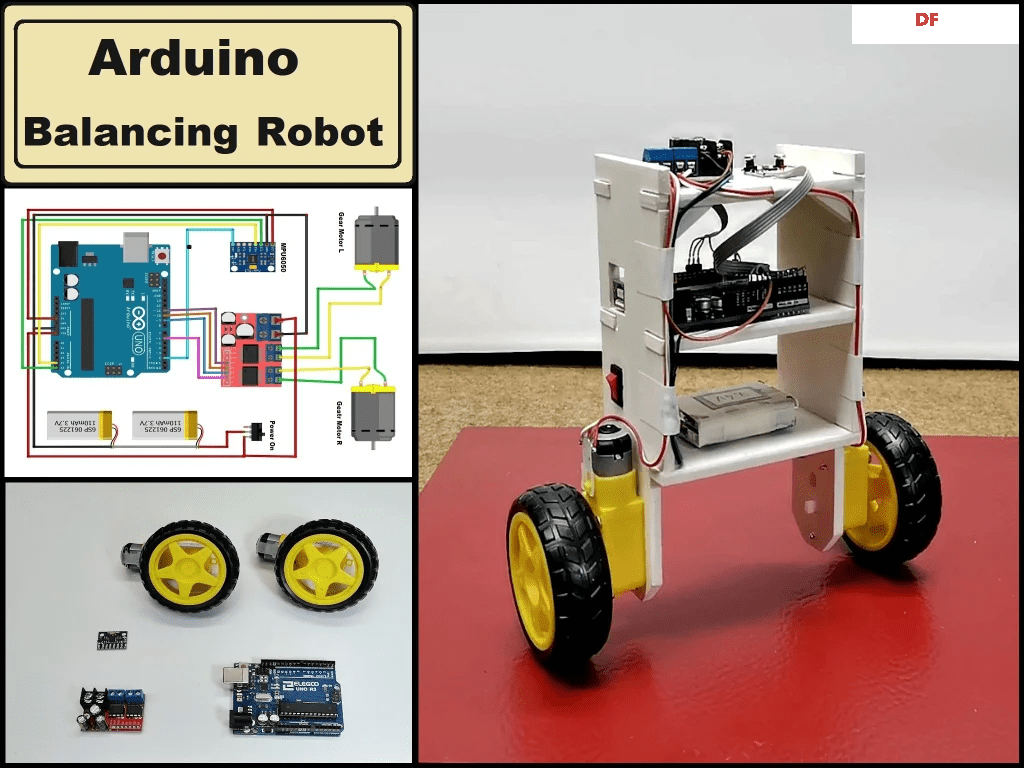 这款Arduino自平衡双轮机器人仅需四个核心组件就能实现自我平衡功能。通过MPU6050加速度计和陀螺仪传感器检测倾斜角度,Arduino Uno处理数据并通过PID控制算法调整两个直流电机的速度和方向,使机器人能够在倾斜时自动调整位置保持平衡。 项目将复杂的平衡原理简化为可实现的电子设计。虽然调试过程可能需要一些耐心(特别是在调整PID参数时),但看到机器人最终能够稳稳地"站立"在自己的"双脚"上,这个过程充满了乐趣和成就感。对于想入门机器人控制系统和平衡算法的小伙伴来说,这是一个既有挑战性又能带来满足感的项目。 来源:https://www.instructables.com/Ar ... lf-Balancing-Robot/ 周刊首发于DF创客社区 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






