|
14784| 0
|
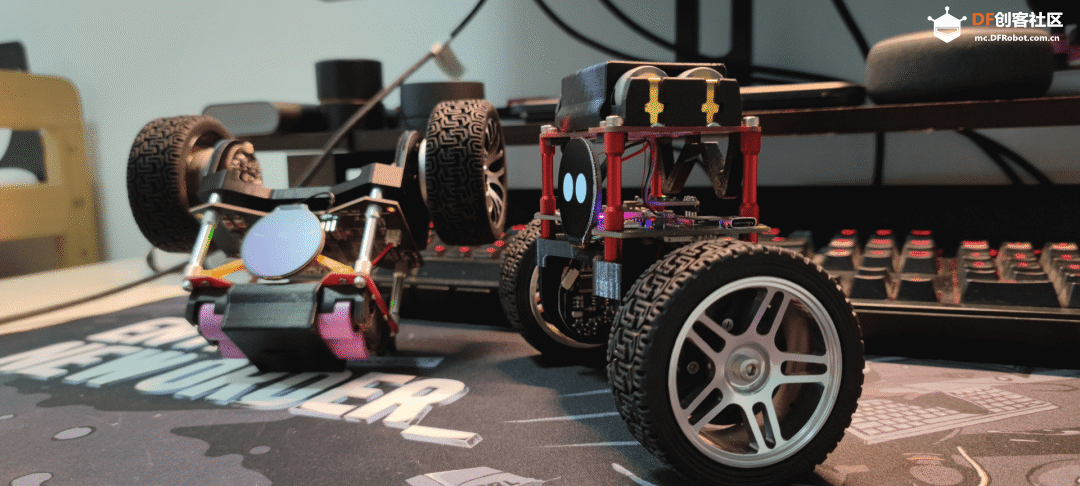
打造你的AI桌面机器人:开源项目D-BOT全攻略 |

本帖最后由 RRoy 于 2025-4-25 15:38 编辑 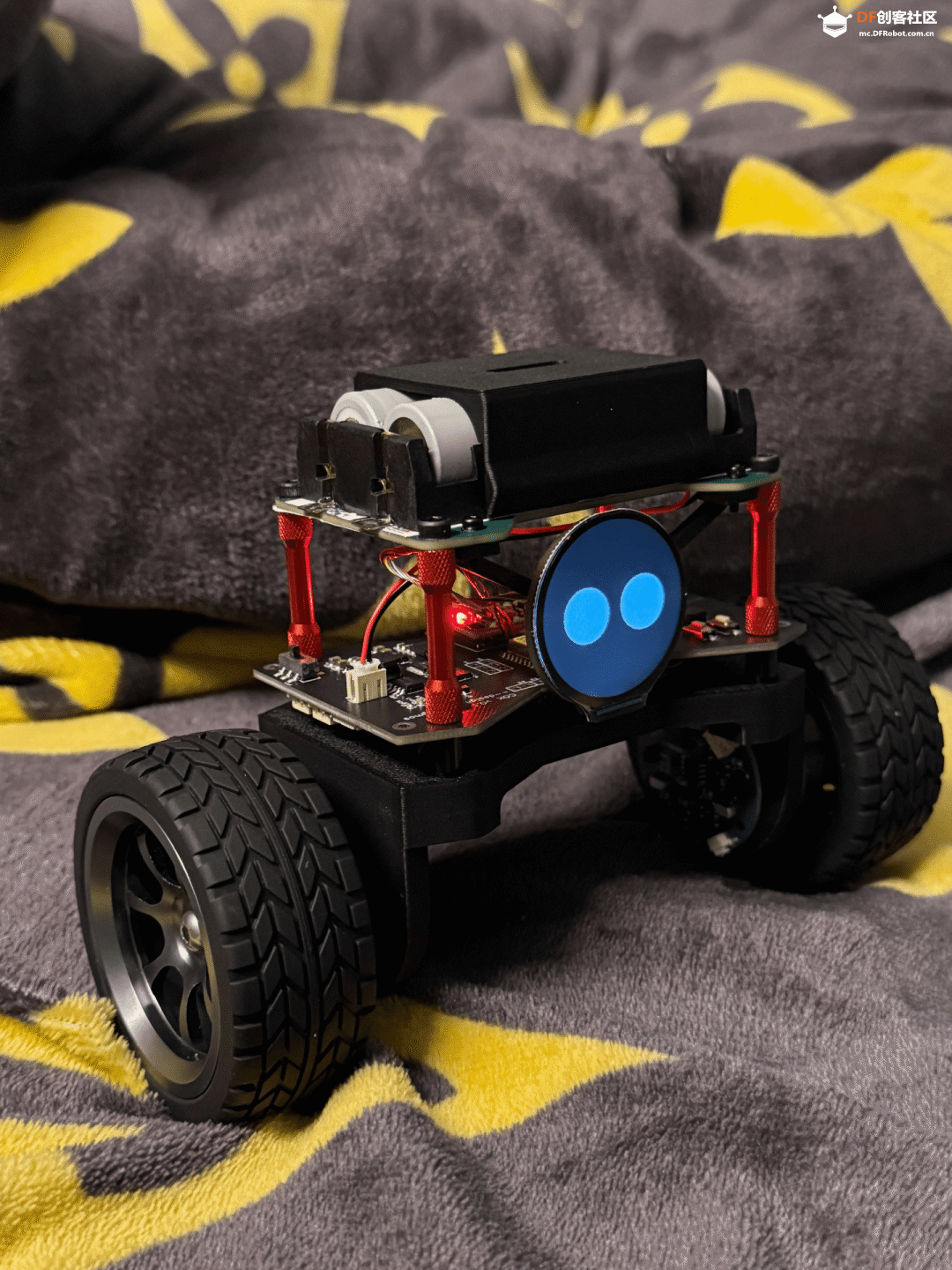 今天给大家介绍一款创意桌面机器人——D-BOT!它不仅是一个功能强大的平衡车机器人,更是一个融合了AI控制、3D建模与PCB设计的开源项目。D-BOT 被作者称为“小探险家”(Discovery Bot),象征着对未知世界的探索,也承载了创客对自我突破的追求。  D-BOT的亮点功能 D-BOT 集成了多项技术,给小伙伴们提供了丰富的玩法和扩展空间:
 演示视频 ▲ 视频来源:bilibili 硬件 主要硬件列表:
已经上传到嘉立创开源平台:硬件开源链接[4] D打印件 D-BOT 的结构采用 3D 打印技术,包含以下 5 个打印件,设计简洁且易于组装:
3D模型文件已上传至 Maker World,创客们可以直接下载打印:D-BOT 3D 模型[5]。 开发环境
步骤 克隆代码:git clone https://github.com/SmallPond/D-BOT 编译与烧录:使用 PlatformIO 编译并将固件烧录至 ESP32-S3。 首次启动:
AI控制:让 D-BOT 更聪明 D-BOT 的 AI 控制代码开源于 xiaozhi-esp32[6],目前优先支持 45coll-sparkbot[7] 开发板。 想适配其他版本的“小智”开发板?欢迎在仓库的 Issue 区[8]提交申请,详细描述板子型号,开发者会统一支持并发布固件。当然,动手能力强的同学也可以参考代码自行适配! 手柄遥控:灵活操控 D-BOT 支持蓝牙手柄遥控,目前适配特定型号手柄,库开源在ESP32 解析蓝牙手柄信号[9]。X-Box 理论上可以使用其他库解析。
无线调参:精准优化
致谢开源 D-BOT 的诞生离不开开源社区的支持,特别感谢以下项目:
参考资料 [1]X-Knob: https://github.com/SmallPond/X-Knob [2]SimpleFOCStudio: https://github.com/SmallPond/SimpleFOCStudio [3]WirelessTuning: https://github.com/SmallPond/WirelessTuning [4]硬件开源链接: https://oshwhub.com/dingmos/kbc [5]D-BOT 3D 模型: https://makerworld.com.cn/zh/models/1061527-d-bot-ge-ke-ai-kong-zhi-de-wu-shua-ping-heng-che-x#profileId-1100492 [6]xiaozhi-esp32: https://github.com/SmallPond/xiaozhi-esp32 [7]45coll-sparkbot: https://gitee.com/coll45/sparkbot-45coll [8]Issue 区: https://github.com/SmallPond/xiaozhi-esp32/issues [9]ESP32 解析蓝牙手柄信号: https://github.com/SmallPond/ble_ctrl [10]SimpleFOCStudio: https://github.com/SmallPond/SimpleFOCStudio [11]Super_Balance: https://gitee.com/handmade-rice/Super_Balance |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






