|
8680| 0
|
LabVIEW,32路舵机控制板和多自由度机械臂 |
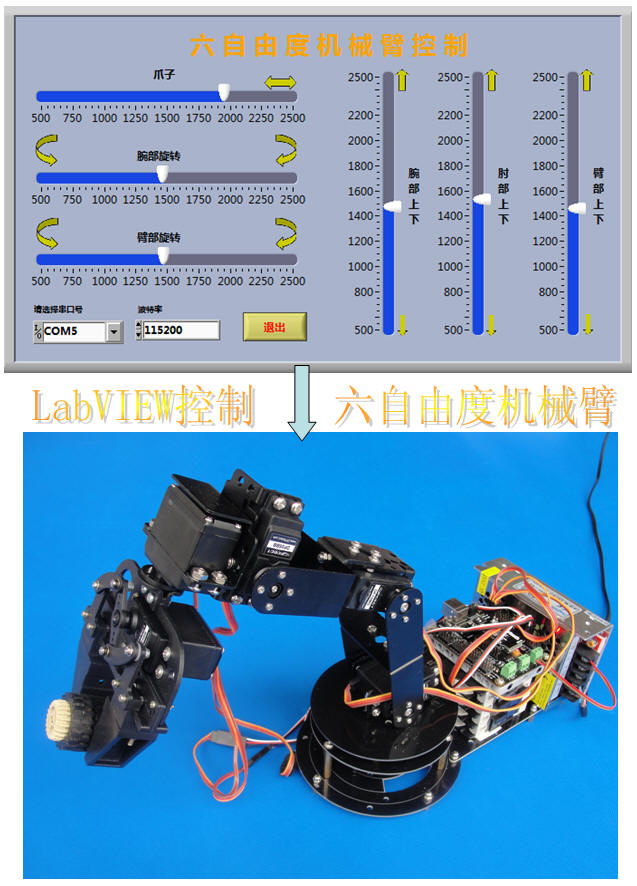 从题目上看,这篇文章涉及了LabVIEW的编程、32路舵机控制板的使用和多自由度机械臂的动作演示,应该还有蓝牙通讯,后面三部分内容,在前面的文章中讲述过,文章题目《32路舵机控制板与多自由度机械臂》,网址:http://www.eefocus.com/zhang700309/blog/12-09/286479_a1c80.html 。这篇文章主要讲LabVIEW如何编程来与舵机控制板串口通信,并进而控制机械臂上的各个舵机。 32路舵机控制板由国内公司DFRobot出品,上一篇文章讲述了如何用控制板自带的舵机控制软件,来设置舵机动作的方法,这篇文章希望用LabVIEW程序来代替厂家的舵机控制软件一部分功能,来做一个为这个实验项目量身定做的人机界面。 实验视频: 点击网址,全屏看视频, 从人机对话前面板入手,开始讲解LabVIEW编程,看看下图LabVIEW前面板中,有六个滑动杆控件,用鼠标移动游标,在行程范围从500到2500的滑动杆上移动,就可以分别控制机械臂上的六个舵机转动角度。 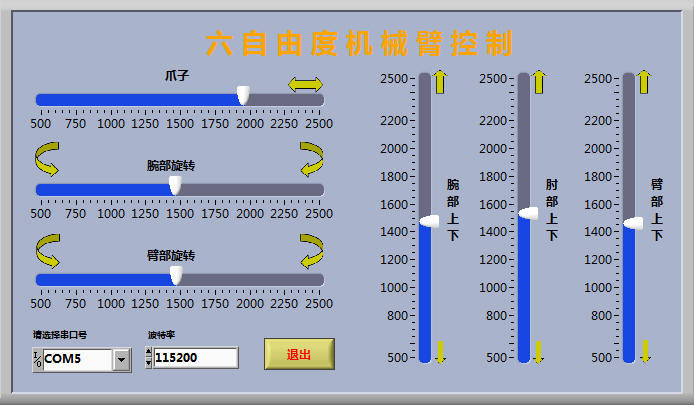 六个滑动杆的当前值会立即反馈到后台程序,即LabVIEW框图程序,这个程序会把这些数据组合成一行字符串命令,并通过串口,下达给32路舵机控制板,进而控制机械臂上的舵机。所以这次LabVIEW编程有两个要点:1、如何编写LabVIEW串口通信程序,让舵机控制板接受到上位机下达的字符串命令;2、如何把数据类型为整数的六个舵机PWM脉宽数据组合成字符串,而且这个字符串必须符合控制板对字符串命令的格式要求。 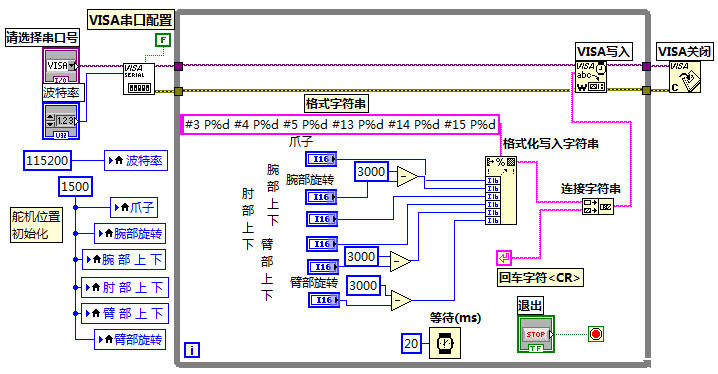 全文见博客文章:http://www.eefocus.com/zhang700309/blog/12-12/289716_4f26b.html。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






