|
27551| 8
|
[项目] 舵机人形机器人 |

|
在没完成作品之前,我在课堂上只能枯燥的引用课件,图片,视频;孩子只能停留在想象的空间中;对机器人迷的孩子们来说,这个案例结合3D打印和开元ARDUNIO软硬件,非常受他们的青睐;制作过程、电路连接简单,捎带20分钟左右的程序学习。这款机器人可以让孩子们通过亲身感受,经历了解更多。 一、先晒个图 原版的开源模型样例(没有舵机可以打印舵机代替品)  由于打印机限制,我把手和脚进行了简化设计()  二、套件 1.3D打印套件一套,源码稍后共享 2.SG90舵机 5个 3.ardunio uno r3 +面包板+杜邦线+USB数据线 4.4节5号电池盒和电池 5.一次性筷子2双 ,螺丝用舵机包自带的即可 特别提示:3.和4.项可以直接用下面的板子替换,这样你就不会和我一样为了如何寻找合适的供电电源,杂乱的连线来苦恼了。  三、制作步骤1.打印组装件 fushion 360制作手 ,脚, 底盘 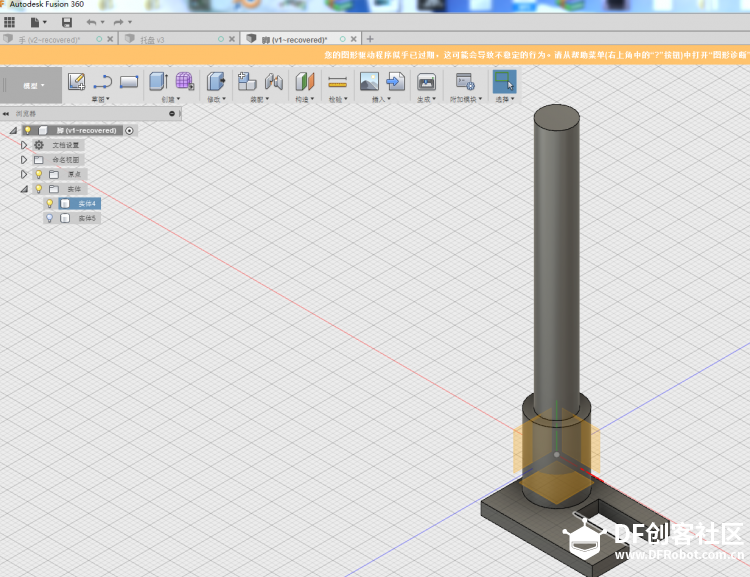 手脚*2 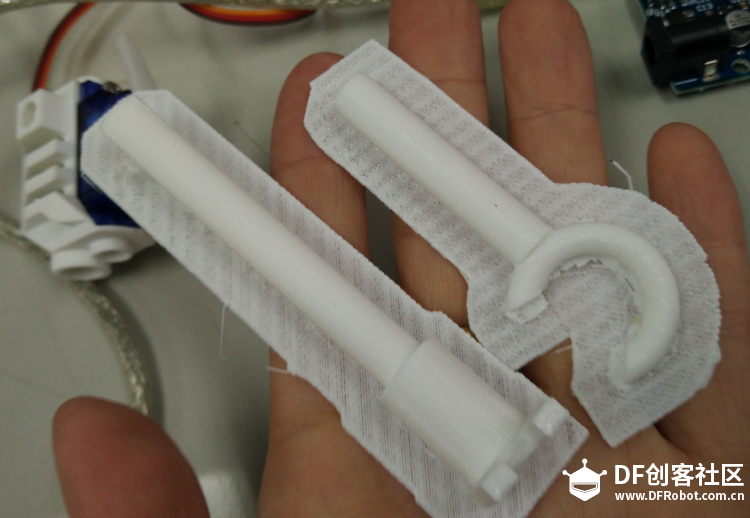 打印身体 ,耗时最长的部件(中间打印机罢工,达到80%的模型报废;又从头开始了,真是满满的泪) 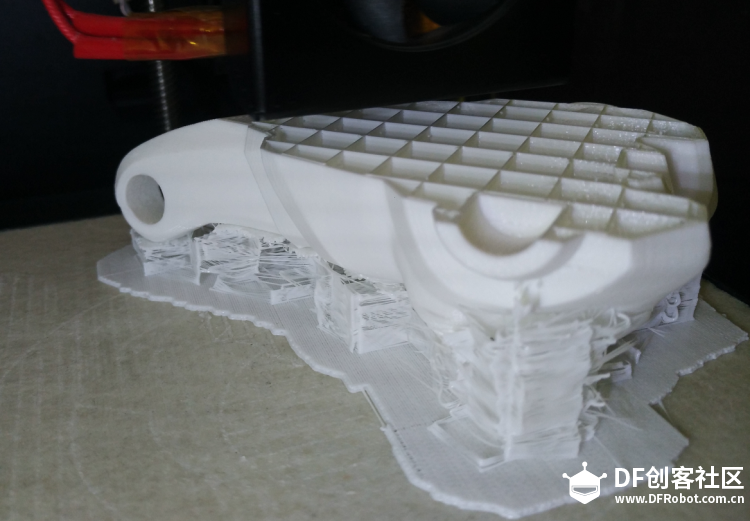 打印舵机,并安装舵机部件(需要5个,一个连接头部,手脚各两个)   2.安装好后舵机想不要着急装,先把每个舵机用电路测试好 主板刷新代码(超简单) [mw_shl_code=applescript,true]#include <Servo.h> Servo servo_pin_11; Servo servo_pin_5; Servo servo_pin_6; Servo servo_pin_10; Servo servo_pin_9; void setup() { servo_pin_11.attach(11); servo_pin_5.attach(5); servo_pin_6.attach(6); servo_pin_10.attach(10); servo_pin_9.attach(9); } void loop() { servo_pin_11.write( 0 ); delay( 1000 ); servo_pin_11.write( 120 ); delay( 1000 ); servo_pin_5.write( 30 ); delay( 1000 ); servo_pin_5.write( 0 ); delay( 1000 ); servo_pin_6.write( 0 ); delay( 1000 ); servo_pin_6.write( 30 ); delay( 1000 ); servo_pin_10.write( 30 ); delay( 1000 ); servo_pin_10.write( 90 ); delay( 1000 ); servo_pin_9.write( 30 ); delay( 1000 ); servo_pin_9.write( 90 ); delay( 1000 ); }[/mw_shl_code] 3.测试舵机 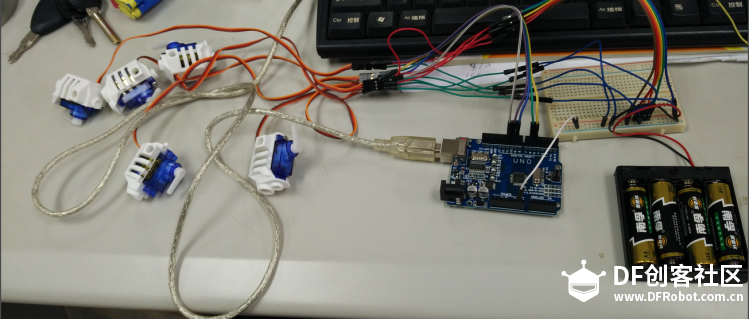 4.整体测试 5.完工 6.代码和打印件 百度网盘 链接:https://pan.baidu.com/s/1jKd4SYi 密码:atbx |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶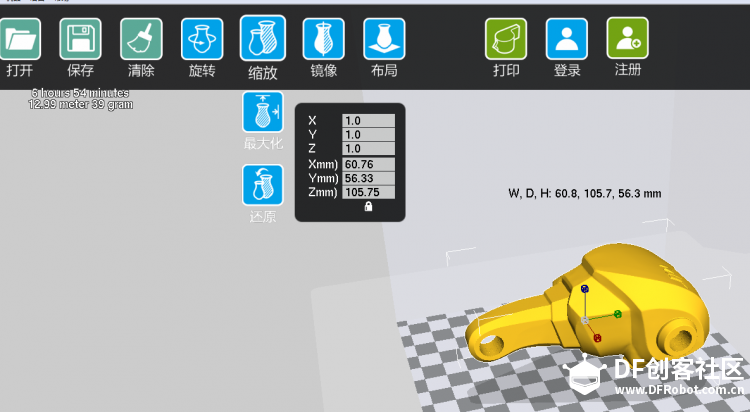


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






