|
11144| 14
|
[建造日志] 【MechBattle建造日志】超新星战队 |
|
本帖最后由 swanglei 于 2018-4-9 21:45 编辑 很幸运有机会参加DF举办的Mini格斗机器人大赛,而且在报名前30名,还可以获得DF免费赠送的电机、轮子和驱动板,在此特别感谢要DF的王大师为促成此次比赛而倾情付出的辛苦和精力。 MechBattle第三轮比赛视频 我觉得格斗机器人既然也叫机器人,它就应该有一定的自控或者至少有程控功能,否则只能叫摇控机器或摇控模型吧。 所以我准备做一个用Arduino控制的机器小车,来实现部分运动辅助控制和自动攻击功能。 没玩过遥控模型,不知道用什么遥控器好,对电调、无刷电机更是不了解,对电机的各项参数和最终运行效果也没什么概念,所以在收到DF的驱动板和电机、轮子前,我准备先做个测试原型,来验证我的控制程序和测试不同参数电机运行效果。 不会用3D建模软件,而且我的笔记本硬盘也没那么多剩余空间来安装SW,下面是我在Excel里画的第一版机器人草图,都是按实际比例尺寸缩放的,用以初步确定各个部件的最佳尺寸、安装位置。 |
|
本帖最后由 LYon 于 2018-3-1 00:00 编辑 机器人基本类型定下来后就开始准备做测试原型和编写控制代码。因为还没收到DF赠送的驱动板和电机,而且王大师自己也给了驱动板和电机很高的定位,性能很强悍价格很昂贵,我也很期待(也很想省钱);P,所以初步的方案我是想先用内置驱动的无刷电机来测试行走和控制系统。为什么要用无刷呢是因为我在淘宝上看到了比普通电机还便宜的二手内置驱动无刷电机:lol,可以很方便的直接用PWM来控制转速、刹车等,这个电机的转速也比较高,正好可以测试下高速行走时的稳定性。 我想我可能要做个这次比赛里成本最低的机器人小车,车身我准备就地取材用我家店里撤换下来的亚克力相机托架,这个尺寸形状都很合适嘛,这样算下来整体成本怎么也不会超过百元!嘿嘿    遥控器我就用30多元的无线PS2手柄,我测试了下遥控距离有20多米应该足够了。Arduino里有支持PS2手柄的库可以直接读取手柄操作,PS2手柄按键多达16个还有两个矢量摇杆,能方便定义多种功能操作,而且可以全键无冲突可以组合起来放大招,哈哈。 我先找了块木板做底盘,把电机用扎带绑上简单的搭了个测试原型,这样可以边写代码边测试。    行走控制方面我用电子罗盘模块来辅助控制机器人行走速度和方向,希望能借此提升机器人行走控制的操纵性。 现在我已经完成了控制系统基础的代码编写,实现了组合顺序按键安全开机、电机正反转缓起动、基本行走控制、左右轮差速比例转向(应该就是航模里的混控)、右摇杆控制基于罗盘的直接定方向转向、左摇杆控制基于罗盘的定航向行走(相当于无人机控制里的无头模式)、头尾方向颠倒控制等功能,加上几个行走和武器联合控制的自动攻击功能键,已经把全部按键功能都用上了。总共近千行的程序除PS2手柄库内容外全部是一个字母一个字母手撸出来,别笑我进度慢啊。 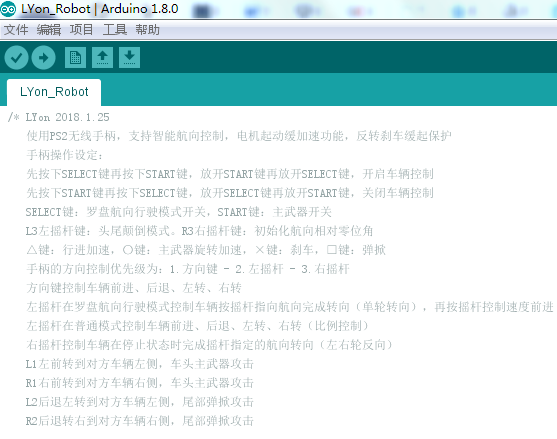 原来发视频要先上传到其他的视频网站啊,我一个也没注册过,等以后有时间再发操控视频吧。 |
|
象我这样航模和无人机都没接触过的新手,第一次参加这样的比赛很可能上场就是送给人当靶子虐的料,所以刚开始我是准备做个超低成本的机器人的,被打坏了也不心疼。 但通过做的搭建原型测试发现,我原先设计的程序运行效果虽然还是不错的,但这个方案可能只适合做智能车,做格斗机器人会有以下的缺点:1、采用4000转无刷电机虽然行走起来速度非常快,但因为功率有点小而且没没有减速箱造成起步有点慢,达到最高速度时机器人要跑出10几米远的距离了,而比赛场地才3米的尺寸,也就是几乎无法运行在很高的速度上。2、同样因为没有减速箱力矩不够,在对战时如果可能会被对方轻易的推着跑。所以必需要换带减速箱的电机,那样的话就需要有驱动板或者电调。 看来我还是老老实实等DF送的电机和驱动板吧,而我的这个Arduino控制无刷电机的方案我可以做一个四驱全身旋转类型的机器人做个备用机,做两个那就还需要另外再买个遥控器。 上网选了好久,看中了华科尔的Devo 7E,这个遥控带中文液晶屏,可以方便的配置各种参数,而且是开源控还可以刷第三方固件,可以自己换一个多合一发射模块实现匹配几乎所有厂家的接收机,也能通过改装支持更多的通道,价格还比较适中才200多元,简直就是穷人的神控。  |
|
本帖最后由 LYon 于 2018-4-1 23:49 编辑 在大雪纷飞的日子,收到了DF送的电机驱动板。打开后发现居然没有配好连接插头,哎呀,我说王大师啊,你九十九拜都拜了,还差那最后一哆嗦啊,就不能给配好插头吗。XT60插头和4P接线端子象我这样没玩过航模的平时哪能用得着啊。好吧,也许插头是过几天和电机一起发给我呢。   又经过许多天漫长的等待,终于收到了DF的送的电机和轮子,这次顺丰足足用了6天时间才把快递送到,平时顺丰在江浙沪皖间的快递可基本都是第2天就能到的啊,估计我是年前最后一个收到电机的。  稍有点失望的是电机并没有如我所想的配好插头,但比较欣慰的是轮子的质量和电机的扭矩都确实挺不错的。正好我买的遥控器和接收机也收到了,我用鳄鱼夹连线夹上驱动板插头和电机、电池准备先测试一下。谁知一试发现问题了,单独控制一个通道电机时完全正常控制,如果两个通道的电机一起连接上控制的话就会,只有1通道的电机正向可以正常控制,反向转速明显慢的多,另外一个通道电机需要两个通道遥杆同时打才能控制电机转起来。这是在我没有开混控的情况下,按说应该应该两个通道完全可以分别控制互相没有影响的。而且我看了遥控器上的通道监视器,摇杆的数据都是正常的。在选手群里一问,果然其他人也有遇到这个问题。后来我又在DF论坛上看到有人换接收机后可以正常控制,我判断应该是信号兼容性或者讲准确性的问题。又仔细看了DF的这个驱动板的资料,资料上竟然写着两个通道都是PPM信号输入,看来可能写文档的和驱动板软件工程师根本就不是同一人,或者没有认真沟通。PPM本身就是一条信号线可以承载多个通道的控制信号,哪里会有需要用到两条PPM信号线之说呢。我现在只希望df的这块板不会真的废了,或许df的工程师以后能重写固件解决这个问题呢。 看来电调还是得要自己买,但年前快递都已经停了,只能先选好那些可能会用到的配件添加到购物车,年后再买啦。 |
|
本帖最后由 LYon 于 2018-4-1 21:14 编辑 虽然行走电机应该是不用再买了,但我还是为送DF的减速电机那只有每分钟500转的转速而纠结。可能王大师被自的机器人曾经在KOB上神一般的风骚走位给吓到了,现在对行走速度过度的敏感谨慎,真是一朝被蛇咬十年怕井绳啊。天下武功无坚不摧,唯快不破,本来我希望能上个10m/s的速度呢,现在被500的转速硬生生给降到了1.4m/s。轮子转速快点我们平时可以不用全速的吧,面对那些残暴的老司机,速度慢了估计连最后逃命的机会都没有了。所以我还是选了不少的有刷电机,准备做下对比测试,看哪种最终更好用。  电池肯定要选3S的了,本来这个电机转速就低,如果电压再低的话那不得走得跟个蜗牛一样了。 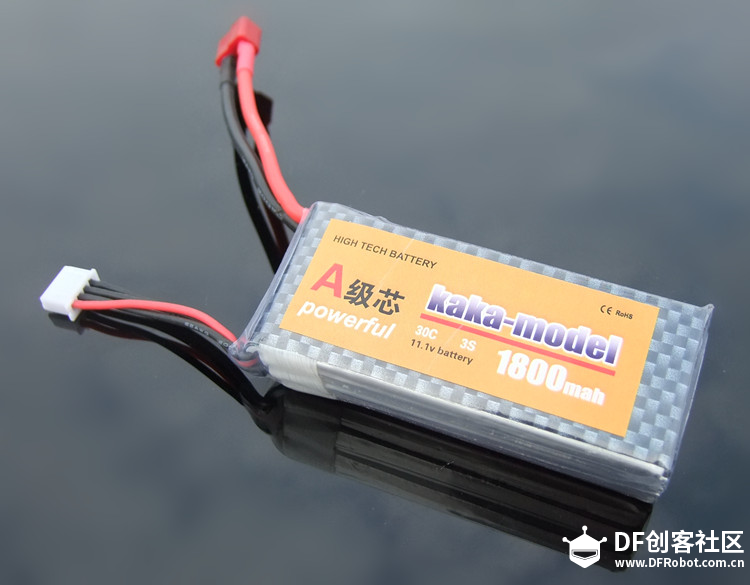 选电调是格斗机器人配件选型最难的事。很多模型车用的有刷电调只能支持2S的电池,能支持3S或更高电压的电调价格基本都是数百元的。百元以内的有刷电调,黑翅的性价比最高,正反转功率一样,但低端的不带刹车不带EBC不支持3S!大电流的功能都比较全一点,但价格要高多了,最关键的体积太大,比电机还大!!! 后来还真找到一种体积小价格低的电调,标称320A的峰值电流(持续电流60A)而体积和价格都不到其他同参数电调的一半,不过却也让我心时没底,但考虑到DF送的驱动板仅仅是5A的都可以匹配送的减速电机,用这个应该余量足够的吧。  无刷电调我用的是这种30A的,价格挺便宜,电流余量应该也是足够的,我想应该可以在武器堵转的时候不会那么容易烧电调。 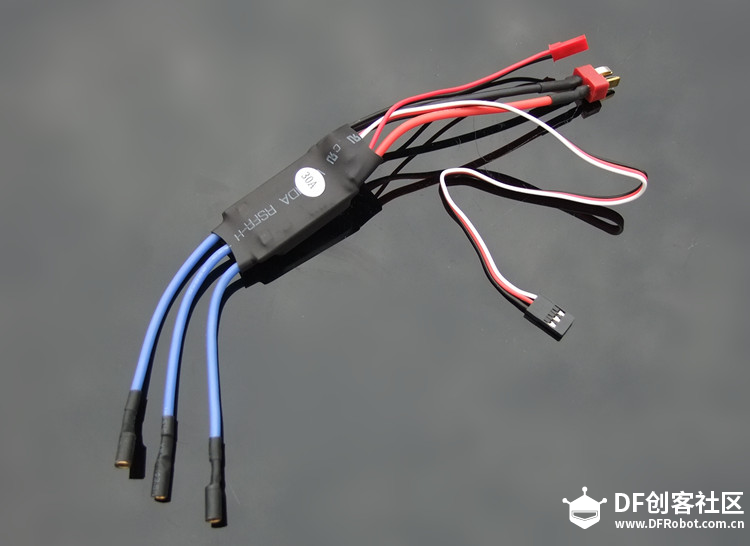 武器电机选的是原装拆机大疆悟1无刷电机3510H,实际收到的接线非常短,几乎是连根剪的,要自己花点功夫动手焊接了。 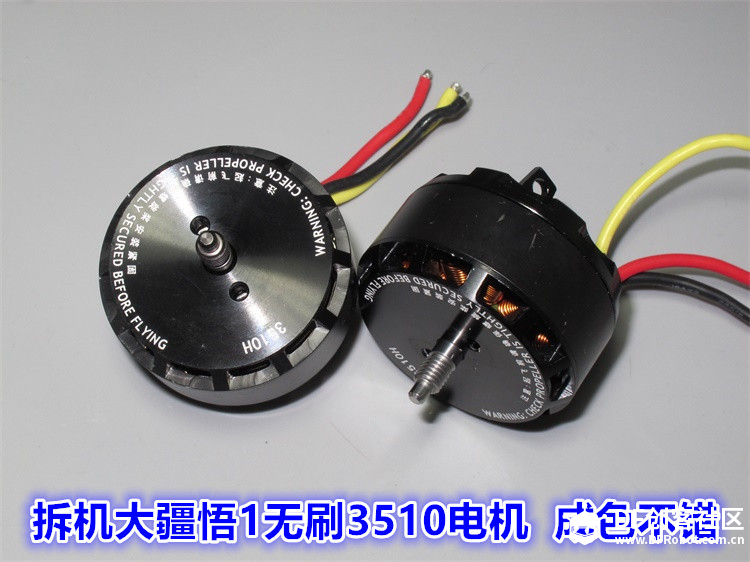 |
|
本帖最后由 LYon 于 2018-4-1 23:31 编辑 年前年后一直都很忙,时间、精力、环境、工具都不适合在家里做机器人,到3月中旬店里工作终于都安排的差不多了,赶忙订了火车票提前赶去上海,这样可以用蘑菇云的设备来造机器人,顺便还能有机会去新国际博览中心看两场电子展会。 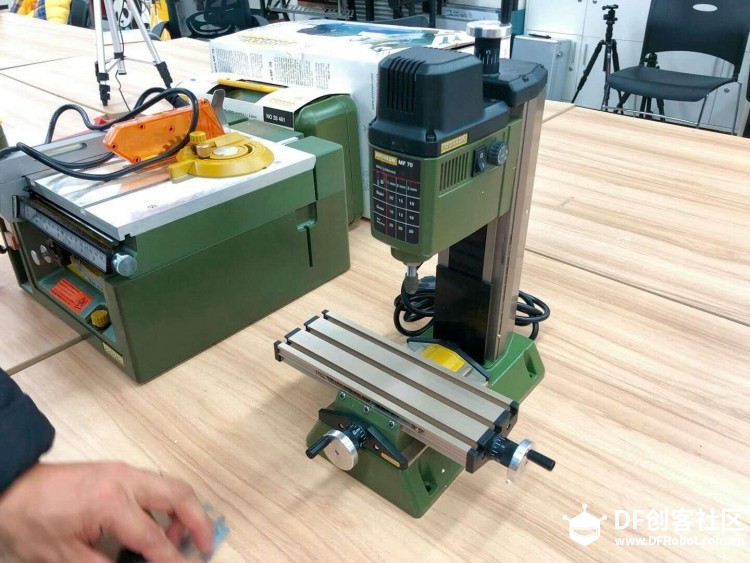 王大师从迷你魔厂家为了这次比赛拉到的赞助   这是我用EXCEL做的设计图,后来发现真正去加工的时候,这个图因为没有尺寸根本没法用,只能用AutoCAD重新画平面图,标注尺寸。 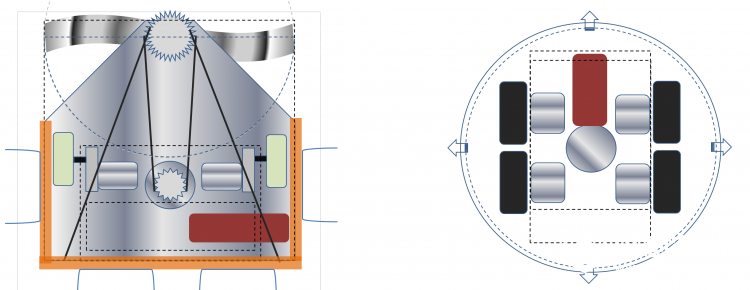  晚上抽空做了张战队对比分析表,都是根据各战队造机日志内容录入的,可惜到直到比赛的时候还没有完成,不过大致的对战策略已经基本确定了。 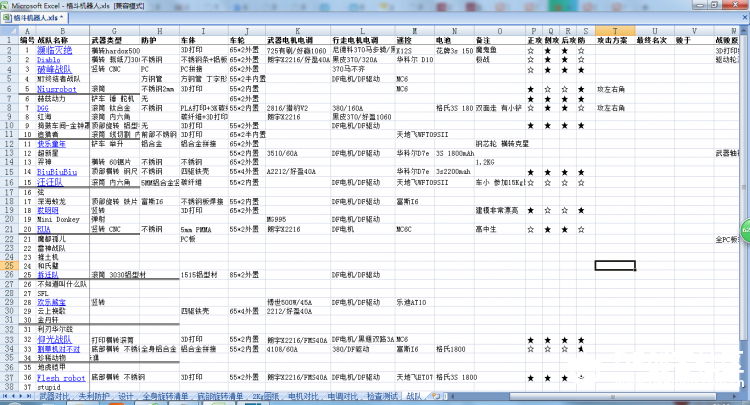 我还是在上次做多功能电子仪器的时候才刚接触到AutoCAD,还不会用它画3D图纸,大家一直都在说的非常好用的SolidWorks需要占用硬盘空间太大我的笔记本也没法装。所以也没法在网上让卖家给我加工好机器人的结构,只能全部自己手工做。为了加工简单我选择用两块铝板做上下面板,中间用木板做框架。    没有迷你魔的小铣床,有些加工还真的没法完成。只是好象这个铣床没有调试好,X轴很紧,摇起来比较费劲。配件也比较少,只有很小的铣刀,要多走很多遍了。还要感谢王大师的双面胶大法,简单固定木料加工快速方便的多啦,不过抱歉因为比赛时间紧张没有来得及去清理掉。   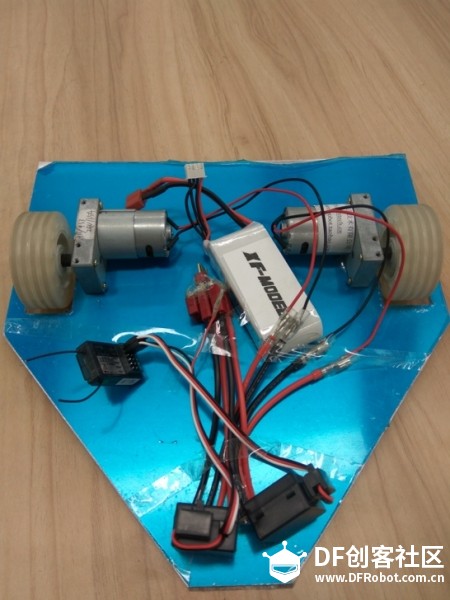 看到下图旁边那个四驱小车和那口不锈钢锅了吗,那本来是我准备用开始的Arduino控制方案做个全身旋转机器人的,可惜因为还有配件没到没能最终完成,希望以后能有机会亮相。  因为买的固定武器的锯片用轴套太长,即使把本来设计内置的同步轮装到外面,机身厚度还是超过了50mm,想双面行走肯定是不行了,只能祈愿比赛时别有人把我给掀个底朝天了。 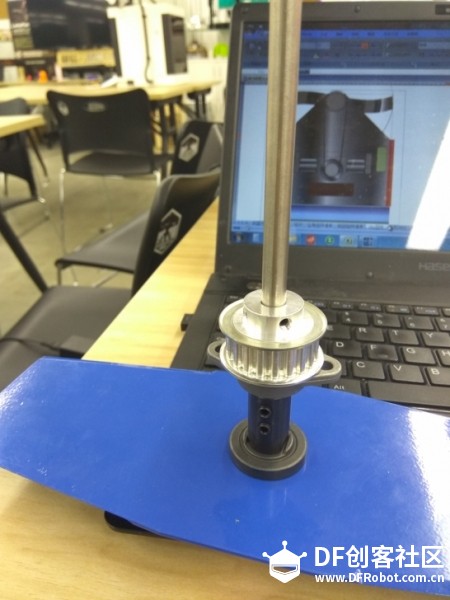 比赛的前一天,我的机器人才算大致完成,但其实武器轴和底板固定的问题还没完全解决,而且木框架也裸露在外,装甲也没安装,只能在蘑菇云通宵赶工了。  直到比赛前3小时,终于上完最后一颗螺丝,万幸的是重量刚好2KG没有超重。赶紧抓紧时间试机,由于担心试机时间过长别把电调烧了,而且电池也可能来不及充电,我总共试机练习的时间还不到10分钟,绝对算是这次比赛的超超新手。  我做的这个可能是这次参赛机器人里最丑的,木框架在外裸露着,上面板上的小盖板丢掉后连“内内”都露出来了。没办法了,马上就要比赛了连太多练习操作的时间都没有,哪还顾得上去做美容啊。在这里要特别感谢Niusrobot战队的牛牛在比赛前给我找了些黄黑布基胶带把机器人的周边裹了起来,才不至于最终半裸出镜:L。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






