|
11739| 12
|
[讨论] 小白关于轮胎和履带的小疑问? |
|
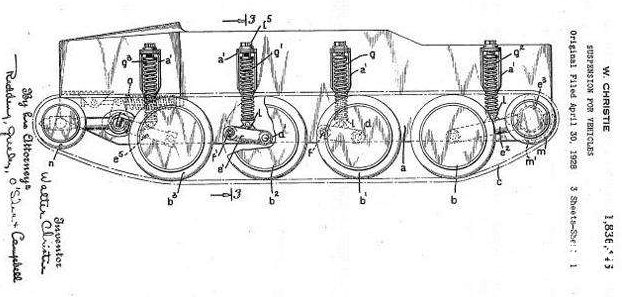
为了解决这个问题,其实我们需要回到轮履两种结构的基本优劣上去,根据题主给的图,应该是bt5/bt7的克里斯提悬架(本人眼拙,如果有错误望题主斧正),所以说题主应该是对履带结构有一定的认识的,所以这里对履带本身也就不再赘述。 切回正题,履带结构的主要用途是 1.用于动辄10吨以上,而使用轮式结构则无法支撑其正常运作的超重型车辆 2.用于对越野性能有特殊高要求,而使用轮式结构则发动机无法提供足够动力的车辆 3.用于两者的交集 军用重武器因为很长一段时间都是以上两者的交集,既需要履带系统提供足够的动态稳定性,又需要其减小压强的特性来增强其在泥泞环境中的机动性。。。这是一个非常合理的设计,而且久而久之形成了习惯,而导致有很多人将履带和结实稳定画上等号 但是事与愿违,履带存在着这样那样的缺点和不确定性,下面我将一一列出 1.履带在泥泞环境下能增加车辆的稳定性和机动性,正是因为其牢牢地“抓住了”地面,但是,在铺装路面,平滑路面,履带却因为缺少摩擦面积(此时地面为非刚体因此面积对摩擦力的影响存在)履带一方面缺失了其本来是强项的机动性,而且因为其粗糙的外形,使得其动态稳定性会大大受影响。 2.履带传动系复杂,实则更容易损坏,履带给人以沉重的感觉,仅仅是因为它的应用场景几乎都是大型机械,并不代表履带的结构本身很稳定,克里斯蒂悬架中的传动系和承重系,扭杆悬架中的扭杆,许多现代坦克的后驱动导轮和前惰轮都是易损件,甚至于履带本身,也是易损件。打一个形象一点的对比,轮子被打飞一半,机器人能够正常运作,要是履带被打烂一半呢?少掉一两个重要零件履带就趴窝了。因此履带其实在同体积环境下,比轮子更加脆弱。 3.履带笨重,这个应该是没有人能够反驳的了吧~也就不多讲了 P.S. 至于电磁铁,想必是bb2015的bite force引来的问题,至于往机器人上装电磁铁概念本身,是没有多大问题的,但是如果你考虑一下 1.电磁铁与卸力的矛盾 2.电磁铁与机动的矛盾 3.电磁铁与其他电子设备的矛盾(注意格斗机器人对总电压是有限制的) 4.电磁铁的重量和体积 你应该可以想通为何电磁铁不是一个合适的“META”。 本人见识短浅,知识鄙薄,希望我的浅薄之见能够帮到题主 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








