|
15726| 9
|
[建造日志] 一些羽量级别格斗机器人几种驱动装置介绍 |
|
大家好,作为一名格斗机器人爱好者与设计者,今天来分享格斗机器人驱动这块的一些小小的心得与体会。 一. 格斗机器人的 有刷驱动在机器人格斗比赛中,驱动对于格斗机器人至关重要,从国外的Battlebots 、Robot Wars、RoboGames、国内的大型电视真人秀《铁甲雄心》、《机器人争霸》、《这就是铁甲》、以及FMB极战、KOB等各个赛事。机器人出现一大半问题是行驶故障。不是机器人被对方机器人拆掉,而是打着打着突然自己的机器人不能动,最后无力回天。 话不多说,今天来简单说说格斗机器人的驱动选择。机器人驱动分为有刷与无刷系统。在国内前期的比赛中(2016-2017)国内选手主要为有刷驱动,顾名思义,有刷驱动就是有刷电机配上减速器与电机调速器(以下称为电调)配合接收器与遥控来使用。 1.什么是有刷电机? 有刷电机为目前市面上最常见,用途非常广泛的一种直流电机,其非常鲜明的特点就是电机屁股端有两个接头或者引线,接上额定的直流电源,电机就转动起来。当调换有刷电机的接线时电机反转。
file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E64.tmp.jpg 图1 市面上常见的775电机(图片来源淘宝) 有刷电机工作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是随电机转动的换相器和电刷来完成的。 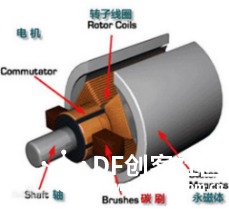 file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E75.tmp.png 图2 有刷电机内部图 有刷电机电机工作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是随电机转动的换相器和电刷来完成的。为了让两者之间既有接触,能导电;又有转动,实现电流的变相,一般的常见做法是在碳刷加一个弹簧。这样,换向器与碳刷便有了频繁的摩擦。所以碳刷很容易磨损,必须经常进行更换。并且磨损掉的碳渣渣在电机里面形成了积碳,需要经常清理。SO有些麻烦为何还有用有刷呢? 因为便宜与稳定! 以15kg级别格斗机器人为例,有刷主要采用775型号或类似大小的有刷电机,市场售价几十块一个,烧了坏了绝不心疼! 光有电机还不够,电机必须配备减速器,传动才能成倍加大力矩。因为输入轴与输出轴传递的功率是一致(暂不计损耗),也就是说减速机输入轴的扭矩与其转速的乘积同输出轴的扭矩与其转速的乘积是相等的。 输出轴扭矩=输入轴扭矩*传动比 (1) 看到公式(1)了,比如一个减速器传动比为10,那么输出轴的扭矩为输入轴的扭矩10倍。这就是光光一个电机为什么跑不动为什么加上减速器才能跑得动的原因,因为扭矩不够呀!(很多人应该开过手动档的汽车,当爬坡时必须把档位降低在1档或者2档左右,为什么? 因为1档或者2档减速比大,输出扭矩增大才能爬坡。) 那么问题来了,想用有刷电机作为驱动,设计个15kg格斗机器人一般选用什么减速器呢? 1. 最省事最经济的选择 当然就是买现成的市场上的775电机配减速器。如下图:  file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E76.tmp.jpg 图3 淘宝上的775减速电机 一个电机加上减速器才一百多,谁都买得起,还是直接安装好的,是不是非常省事,对滴。确实省事! 那么多少转速合适呢? 一般比赛方都会要求最低速度不能低于多少km/H,一般速度不会低于8km/H(因为两个机器人向蜗牛一样爬就不好看了)。 根据目前主流设计,赛场上一般在12km/H速度差不多,因为不会太快且速度相对容易掌控。 12km/H=200m/min 200m/min怎样换算为转速呢?来个比方,例如驱动轮子直径为100mm,也就是半径R=0.05m,那么周长: L=2πR L=2*3.14*0.05=0.314m 所以轮子转动一圈前进的距离为0.314m(不考虑打滑) 轮子为了达到200m/min的速度,每分钟就必须要转动200/0.314=637圈才行!所以在淘宝选择600转速的电机就可以啦!(当然选择500转速也可以的,把轮子直径加大就行) 当然了,目前国外巴西,美国,荷兰,国内一流的队伍一般设计转速为800-1200转之间。为什么? 刚刚说了,因为他们是一流队伍,比如巴西队伍格斗机器人俱乐部成立有20多年历史了,设计水准与操控水平都是一流的,所以他们能驾驭更快的速度,这样能帮助他们更快的绕到对手机器人的侧面或者后面进行攻击,或者躲避对方机器人的攻击。 那么淘宝直接有现成的卖为什么绝大数爱好者与选手还要自己DIY呢? 因为现成减速器出轴直径太小才8mm左右,看下图: 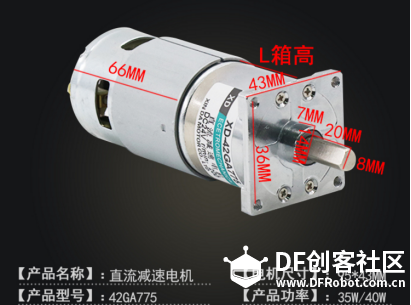 file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E77.tmp.jpg 图4 775减速电机参数 轴直径8mm在格斗机器人赛事中基本不占优势,因为容易断轴。加上有的厂家为了保证竞争力,必须降低制造成本,非常好用的材料与麻烦的工序用上了怕客户买不起。比如减速器齿轮用40Cr粗车后调质、热处理效果较好。 还有个另外的问题,电机功率才40W左右,机器人一旦撞墙或者堵转,电机容易烧。 P=U*I 接上24V电压,电流都不能超过2A,不然的话很可能烧电机。所以很多比赛选手不会选用该小功率775电机,那么很简单,就选用大功率的775电机,或者895电机。 2 大功率775或者795等电机配减速器 很多人都会选用这个方案来做为机器人的驱动,因为单个电机功率可达几百瓦特,电流可达几十安培。775有刷电机就不多说了,网上搜索遍地都是。以下介绍配有刷电机的减速器: 有刷电机配上减速器减速比基本在15或者以上,因为有刷电机转速基本1万转以上(每分钟),甚至达到2万转,所以为了获得相对应的转速(例如800-1200转),减速器的减速比基本在15以上。常见15kg格斗机器人配备的行星减速器有: ①42/52减速器(电机直径42/52mm)或者SUNTRY减速器  file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E78.tmp.jpg 图5 SUNTRY行星减速器 file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E79.tmp.jpg  图6 马步崎行星减速器 为什么选这种?因为减速比可以选择,粉末冶金钢齿轮,价格相对便宜,不超过200块一个,很多人都能接受。 缺点:电机轴最大不超过12mm,大多数出轴直径10mm。还是不耐操,如果轮子不加保护10mm输出轴在赛场受到冲击断轴或者轴弯曲的机率还是很大的。(这些都是比赛打出来的教训。。。) 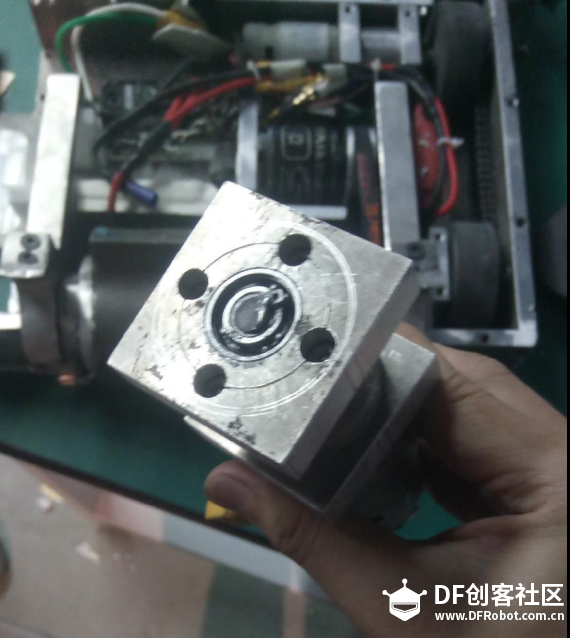 图7 减速器断轴 ②咸鱼电机减速器 因为国内适合15kg格斗机器人减速器选择并不多,所以国内比赛选手自行设计了该直流减速器——咸鱼电机减速器 因为该战队把735电机与自行设计的减速器结合起来,大大减少比赛选手们的改装或者加工的工作量。所以对于选择有刷驱动的玩家来说是不错的选择。售价为340RMB左右。很多战队的选择。 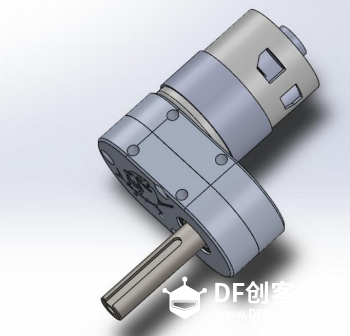 file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E7A.tmp.jpg 图8 咸鱼电机减速器 二 格斗机器人的无刷驱动 无刷电机渐渐成为广大格斗机器人爱好者的选择,一般无刷电机要比有刷电机贵数倍到数十倍(几百RMB一个)。 1. 什么是无刷电机? 无刷电机(Brushless motor),简单来讲,就是用永久磁铁作为转子,而定子则成了通电线圈。通过按照一定频率改变定子的电流方向,就可以实现电机的连续旋转。这种方式,就不再需要有物理接触性的碳刷了,而是通过特定的电路实现定子线圈的变相,无刷电机其实就是个三相交流电机,靠控制器把直流电转换成三相交流电,并根据电机里的传感器霍尔元件进行换相使电机正常运转。直接来说,无刷电机比有刷电机寿命长、起步有劲省电,但是控制器却比有刷控制器成本高。 2. 为什么选择无刷电机? (1)无刷电机是在有刷电机基础上发展起来的。在正常使用下几乎不需要维修。(因为不需要更换碳刷) (2)相同体积下无刷电机功率与电流比有刷电机增大数十倍甚至上百倍!拿型号4274内转子或者5065外转子无刷电机举例,无刷电机最大通过电流达120A甚至更高,转速达5万转,一般需要配备120A或者150A电调。所以在功率、扭矩、电流、转速上无刷电机比同类别的有刷电机要高出很多。 (3)外转子无刷电机本身轴径更粗,可以达到8mm左右。更方便固定,例如固定输入齿轮或者同步轮时更加方便,(轴太小的话装顶丝容易滑牙) 3 无刷驱动的选择 无刷驱动一般选择外转子低KV大扭矩无刷电机,内转子如4274转速太高,传动比要求很大才行。无刷电机大多直接同步轮配合皮带传动,传动比1:3或者1:5左右. 国内像一些队伍采用打同步轮固定在驱动轮子上,外转子电机为200KV(电机KV值乘电压等于转速),如果上6S电池(25V左右)其转速为5000rpm/min,经过减速后轮子的转速为1000—1600rpm/min左右。国外有的队伍传动比也为1:3或者1:5左右。 1.如下图8驱动装置,首先用齿轮减速,再配合同步轮减速,相当于两级减速,电机转速参数为480KV左右。  file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E8B.tmp.jpg 图9 荷兰队伍驱动装置 2如图9,直接用皮带轮一级减速,同步轮与轮子一体,由同步带带动传动,减速比1:5左右。(轮子质量好但造价不低)  file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E8C.tmp.jpg 图10 带同步轮的轮子 3.如图10与图11 滑板车驱动装置采用皮带减速,电机推荐选用50(直径50mm)系列电机,电机推荐型号5045 200KV值。电机体积小功率大:1200W LiPo Cell:3S-10S file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E8D.tmp.png 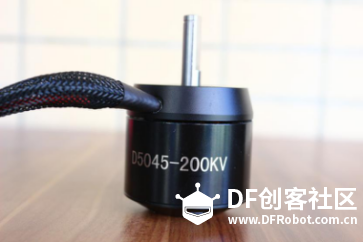 图11 5045无刷电机 4.如图12所示格斗机器人驱动装置,减速比分为1:3与1:5,电机选用5045 200KV, 输出轴材料为调制处理的40Cr,轴直径为15mm,非常耐用。(为了减重有些队伍已经将输出轴改为钛合金) (为什么要用5045,不用5065等,因为5045完全满足15kg格斗机器人驱动,且配上双5045电机能够用于滑板车载人,因为5065电机尺寸更大更重!荷兰BONX战队新Rambi战车选用该型号电机,驱动装置减速比为1:3.结构简单稳定。) 该驱动装置同步轮固定全部采用D轴配合传动时决不打滑!  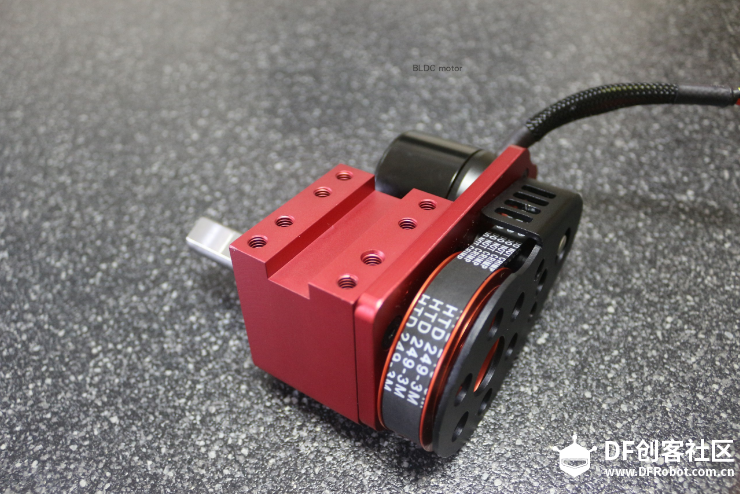 https://item.taobao.com/item.htm?spm=2013.1.w4004-19656425538.2.5e5c4c40wj5bhc&id=584454771113 file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E8F.tmp.jpg file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml\wps4E90.tmp.jpg 图12 无刷皮带减速驱动装置 最后,几个tips: 1 格斗机器人行走为什么那么多队伍用皮带传动? 因为皮带韧性好,减震好,而且基本不会断裂,受大力最多只会打滑冒烟。 2 采用齿轮传动作为驱动的建议 首先,出轴要适当粗。齿轮材料一定要好,加工完需要热处理或调制齿轮硬度与韧性都会大大增强,例如40Cr或者38CrMOAL系列材料(38CrMoAl有更高的表面硬度,耐磨性及疲劳强度,并具有良好的耐热性及耐腐蚀性),一般粉末冶金齿轮强度最多为机加工齿轮强度的80%左右。。 今天的介绍就到这里,能力有限难免存在不足与错误,欢迎大家留言批评指正! |
lixiang 发表于 2018-12-27 11:01 有没有120A电调的淘宝链接 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








