|
18700| 14
|
[建造日志] 葫芦娃制作日记 - 破峰战队 |

|
大家好,我是洋葱,是破峰团队的主计师。  2018年5月1号武汉落幕的KOB全球格斗机器人大赛羽量级荣耀获冠军。   葫芦娃就是出至我团队的设计,一款模块化武器,竖转与偏置底横转切换 整机重量:13.6公斤 长:345 宽 :560 高:218  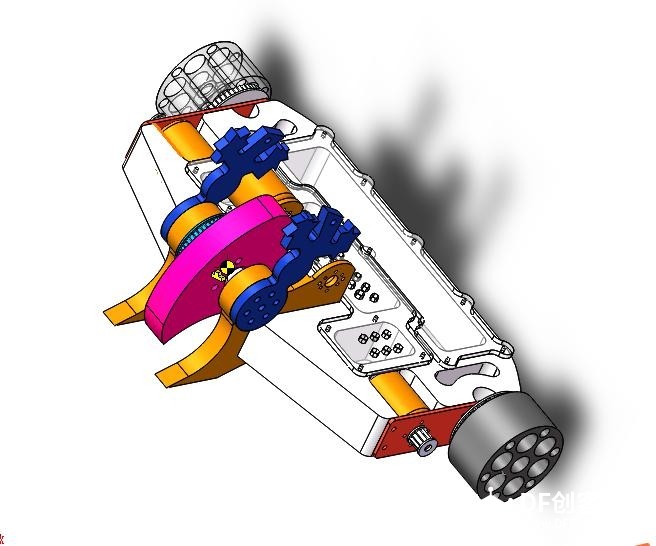  这里向大家,说说详细的制作过程,分享吸取到的经验。 葫芦娃是借鉴,国外的格斗机器人成熟技术,基础上改版而来,有原版的样子,又有别于原版。  。国内格斗机器人开展的比较晚,在国内,也是没有可借鉴的,凭空现象不太现实。 真正目睹国外先进技术的,机会也不多,所以,技术落后,是不争的现实。 毕竟外国人玩了20多年的基础在那边。 不是一天两天,喊喊口号,动嘴皮子就可以赶超的,(我就是要打麦克白,我的机器天生克制。)这个是一个梗,自己去快去看;这个就是铁甲 知道吧。 现在阶段唯一快速途径就是接近通过,借鉴,国外的先进方式,自己所用。避免在家里闭门造车。 在这里我很有幸在2017年,10月份担任KOB,第一季录制幕技术支持。作为现场技术支持,我工作就是参赛所有机型的技术检测,零距离接触,可以和当今格斗机器人顶级团队沟通交流,更充分了解了每台机子的详细数据,优缺点。 在这里,感谢KOB给我这一次经历 在这里,我借鉴了一台。缠绕者战队的大白鲨子机。13.6公斤的偏置底横转。 有人疑惑了,110公斤的机器比赛,一台13.6公斤小机器人过来干嘛?在以后的比赛中,这台子机表现会让人惊艳到,移动迅速,攻击力,爆表。 把110公斤的机器人的护甲都给拆掉了,让多台110公斤机器人的轮胎,失去移动能力。 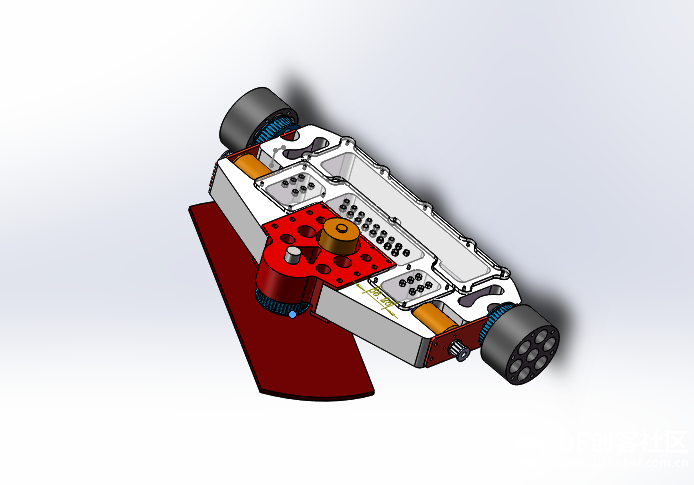 好,那么我就分析这台机:机身采用HDPE塑料加一体切销,保证了机体的强度又有韧性。 在激烈的对抗中,不至于解体。塑料可以有效缓冲,冲击力, 全无刷电装,使攻击更凶猛,移动更迅速。 葫芦娃借鉴了。这台机器的优良的,行走性能,和塑料主框架。 葫芦娃主机体:采用同样的HDPE整体CNC保证精度。  前面正装甲:采用了,6毫米钛合金护甲。整体的思路是外刚内柔。 坑打击性能好打不易崩溃,但是不耐切削。装上钛合金护甲,保证它不会被,电锯,坚转,以及竖状类武器给切挖没有了。 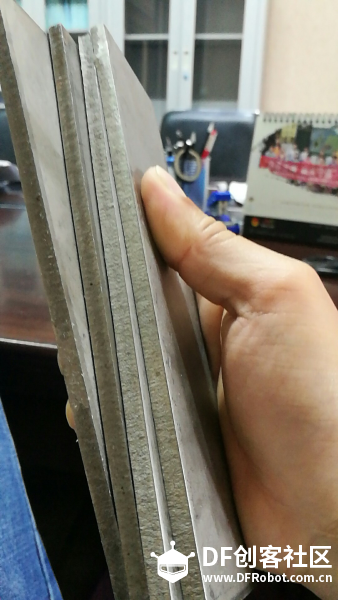 我在原版的基础上增加了可换式,武器模块。让对手,可根据对手更换自己的武器,以达到最大限度的弥补缺点。 一台竖转和一台横转模块,孕育而生。可搭载这个塑料底盘,通过螺丝的互锁达到快速更换。 武器的目的。 武器模块配件:武器3公斤,模块整体重量6公斤 砍脚刀模块,配置基本一样做到配件通度高。关键时刻可以拆配件使用  武器支架:采用20毫米7075铝合金制作, 武器使用:是耐磨钢,汉达都是大家熟悉的,但是我在这里能买到克虏伯国产钢。  小提示 :在没有经验的以前。会把武器拿去淬火,现实打斗中发现会断裂,所以后设计武器不纠结淬火,和硬度问题,会卷边,会凹陷,就让他去凹陷疤,至少不会断。况且格斗机器人都是惯打击伤害靠冲击力导致的损毁。 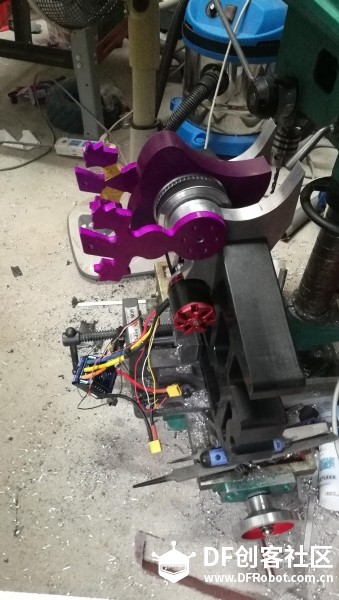 武器设计:打击效率,武器设计成单牙,目的就是能让打击效率更高。 武器轴:采用黄铜的自润滑轴承,速度不合适,高速度武器要考虑到摩擦热膨胀会使轴套抱死,在实际比赛过程中,有选手出现武器卡死现象。这就是热膨胀。 武器转速:不宜过高,过高容易导致陀螺仪效应自己翻身。机器人会将变得无法控制。 我这里最高转速3500转。实际效果证明,足够把一台13.6公斤机器击飞两三米。 自己受到陀螺仪效应干扰也会最小。 武器支撑:可以反面支撑机器武器不日地面,可以反面驾驶功能,两个葫芦的形状,所以叫葫芦娃,这个设计还有幕后,大家来找茬。    武器转动方式:PJ多曹皮带,长度根据自己设计需,皮带需要打滑 打滑是对构的保护,避免其它配件出现故障。  主体框架缺点:没有正面贴地铲,容易被拆。【拼操作了一切设计都是浮云】。 优势:武器位于最前端,对方所接触到的第一时间点会是我的武器。 轮胎:选择轮胎,好车要配好的轮胎一个道理,轮胎选择至关重要。 要满足摩擦力,重量,坚固成度,要做出合理的匹配。 在这里,我手工制作的轮胎。根据这台机子高度算出为100毫米。也就是所谓的4寸,宽50MM  在相同的机身材料,HDPE塑料CNC加工出来.表面上裹上一层磨具硅胶,这个方法是请教一个DGG朋友得到配方。他告诉我要怎么制作轮毂,才能很好的覆盖在表面不脱落。  轮毂打许多通孔,让硅胶流入。这样怎么甩都无法分离。 实际制作过程遇见的问题:第一,AB配比不正确,手倒。不精确,导致2天才固话。还很不好效果 之后控制配比,100:3的量,比较完美。灌胶完必以后,放入真空容器中抽真空5分消除制作过程中才是的气泡。详细制作轮胎过程。DF论坛有DGG轮胎作品。这里不做过的描述。 实际使用中轮胎的摩擦力,效果一般。可能是没有轮胎的纹路,灰尘裹满以后,摩擦力就下降了。 由于设计高度的问题。快要比赛时的前几天发现,一个致命的问题。竖转的轮胎设计小了,翻身无法着地。这下好尴尬 这时候解决方法,换大的。5寸成品轮胎,静音手推车负重轮,很便宜,一个几十块钱。顺利解决了外观难看一点。效果不错用的是橡胶,摩擦力高与自己做的。   接下来介绍,这台机器的动力系统。与原版本一样,采用了全车无刷,保证了行动的敏捷 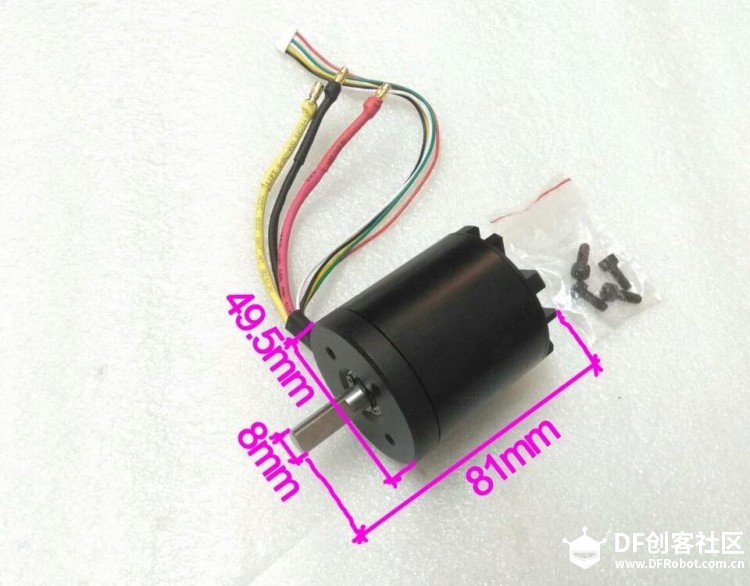 行驶与武器电机来至由定制的国内滑板车电机N5065 行驶KV200 武器KV400  电调选择:好盈150A速龙。选择速龙的原因, 此系列用于车辆模型竞技比赛专用支持有感 前进100%后退100%,拖刹开启100% 这个基本参数功能是必要的, 电调油门响应速度极快。  轮胎的减速比与固定:通过M5同步带.1:4的减速比,链接轮胎 轮胎固定方法10毫米钛合金螺丝加两个轴承以死轴的方法固定,省重量。  特别注意这款有感电机的连接方法。 abc的相位一定要选择,判别正确,相位的最好方法是,   买一个电动车的电机检测器,判断出个相位线序做上记号保证正确,不然电机不转,久了就会冒烟。  电池6S 2000mah 45C两块 电池的选择满足在场上行驶三分钟 武器也是用一样的电池  不过在实际试验中,6S2000毫安的电池仅提供一分半钟的动力时间 下面文章我会给大家讲解,为什么这样设计。 强烈介意在比赛时一定要购买新的电池不能省钱,保证足C数。 由于省钱我使用了两年的库存的大肚电池,导致在比赛中电芯烧突然毁,然后停行动被KO了。 遥控器:遥控器上,我选择的是天地X4枪控,做驾驶。  搭配破锋团队,专门为格斗机器人驾驶编写的控制器  功能介绍:当左右两个电机不同步,倒至的偏航主控自动矫正。 以及偏置横转或顶置旋转武器产生的反扭抵消。  能让过弯更加的精准,我们老司机才能做出来的所谓的漂移过弯,这里可以轻轻松松实现。 特别合适双面驾驶的机器人,在机器人反面行驶的时候,会自动校正。 所以当你的机器人,无论是正反面,不用改变你的操控技能,还是正常的操作。 控制器只是辅助稳定驾驶,不是自动控制,也没有人工智能,别想太多。 一切的操作还是靠人完成。我们老司机说的叫随心所欲的操控感,爽 天地飞九,作为副手控制武器,  很显然,我配两个遥控器的目的,这台机器是双人驾驶。 这里有人问一个人控制不行吗? 回答是当然可以! 干嘛要两个人?这里很重要的提到的一点是配合。 高级驾驶:武器副手负责武器的启动, 运行时的油门变化,要根据驾驶员的速度,以及攻击意图做非曲线变化。 还要根据武器电量损耗,告知驾驶员,作出相应的战术配合,还要还有几秒的动力时间,上面说的武器电池配的时间只能维持武器工作一分半就是说我打不了持续战,一切都是为减重量。 如果武器损毁,相应的做战术调整。 所以副驾驶的责任也非常重要。 主驾驶员负责,展现自己的驾驶技术与场上的灵活应变。 两个人分工,是很有必要的。当您进入比赛状态,全神贯注肾上腺素飙升的时候, 你连裁判读秒都听不到的,这时候你需要,副驾驶的提醒。拉你一把呵呵呵 这就是我们所谓的旁观者清  说了这么多,相信大家有所了解,成功不是偶然一定是后面付出了很大的努力。前前后后花了半年设计完善去设计 感谢我们的团队其他人的付出,感谢所有的人。  谢谢大家花时间看我瞎逼逼,我与大家分享,可以做参考,提供新的思路,做更强的机器出来。希望早点看见中国的更多的格斗机器人真正的天生克制。 |
 老版主限定
老版主限定



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶