|
25397| 12
|
[入门教程] Devo10的使用及混控教程 |

|
Devo10针对格斗机器人的使用和混控设置教程。 遥控器是航模和格斗机器人中主要的控制设备,华科尔Devo10(简称D10)就是其中性价比比较高的一款产品。 D10对比于其他同类产品具备最大限度的硬件和软件的扩展空间。经过魔改后不仅可以在操作上实现更多功能,还能够 支持其他品牌协议,做到一控多用,在身边玩航模和机器人的朋友中D10的持有度很高。但其中一些不太熟练的玩家因 为错误操作经常出现一些问题,甚至有些人完全不知道如何设置。所以这里我来具体说下D10针对格斗机器人的使用方 法和混控设置方法。 拿到遥控器后首先进行硬件调整,遥控器到手后默认是航模的操作习惯,所以油门摇杆是不会自动回中的,需要自己 拆机进行调整。 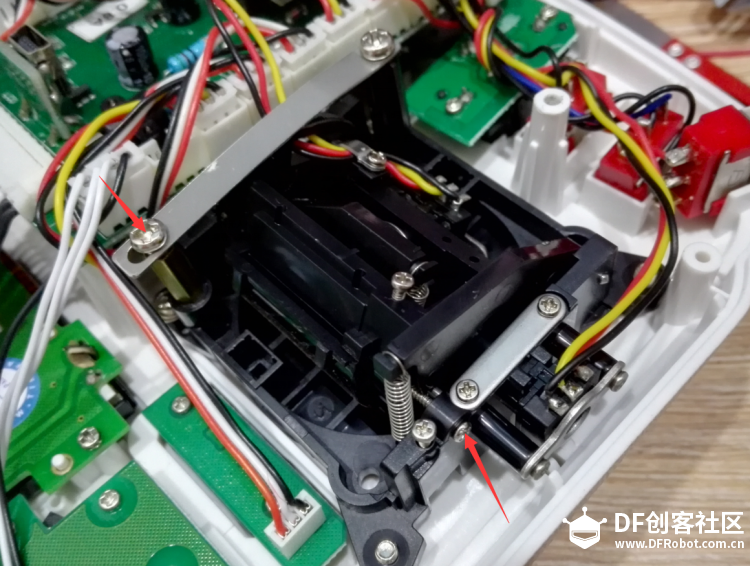 把定位的弹片螺丝拆掉让定位片翘起来,然后再把挡住回中弹片的螺丝拧出来恢复自动回中即可。 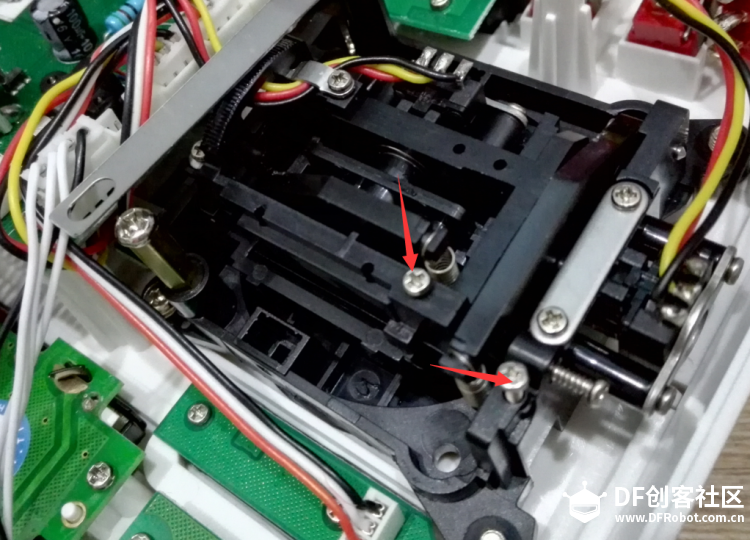 改好后和上图一样,箭头处的两个螺丝可以调整摇杆的弹性,根据自己使用手感调整就行。 其他的硬件暂时不用动。插好排线装回去就行了。 下一步,刷固件 D10原版的固件用起来不是很方便,这里推荐第三方固件deviationtx。 官方网站在这里,https://www.deviationtx.com/ 具体刷机教程里面有详细的说明,这里主要讲使用。 遥控器设置中用到最主要的区域是遥控器下方的屏幕和左右两侧共6个按键。 左侧为上下和返回,右侧为左右和确定。上下一般用于改变选择区域,左右一般用于修改选择区域。 作为演示,这里使用deviationtx官方固件版本下的模拟器进行说明,这里可以直接显示出屏幕图案,各摇杆和开关的 数据,以及输出通道的数据。  deviation-emu_devo10-v5.0.0.zip 大家可以下载下来试一下 deviation-emu_devo10-v5.0.0.zip 大家可以下载下来试一下开机后如下图。 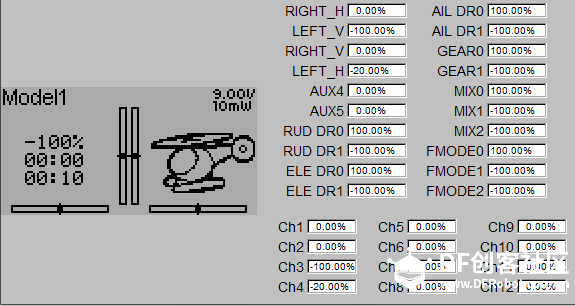 按确定键进入主菜单 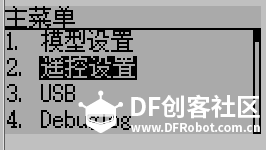 按上下键进行选择 在遥控设置,遥控设置中有一些关于遥控器最基础的设置,包括摇杆校准,缺电报警之泪的。使用之前一定要先过一 遍,以免因为遥感不准,缺电等问题造成失控。 设置好后我们返回主菜单进入模型设置开始进行模型设置和混控设置。  在模型设置主菜单下有模型设置和混控两个菜单,在一套新的收发器第一次使用时先进入模型设置。 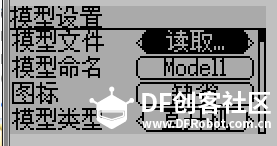 可以设置的项目会有两种标识,带有左右箭头的可以通过左右按键修改选项,带有方框的可以按确定进入详细的修改 页面,如果两个标识都有说明都可以操作。 模型设置这个菜单下有几个选项需要特别注意。  发射功率,默认是10mW,为了在铁笼一般的格斗场地上保持比较良好的信号,建议增加到100mW。 链接接收器之前要将固定ID码删除,返回后对频按钮会变成初始化。  这时讲接收机清码线插入,给接收机上电,看到接收机开始闪烁拔掉清码键,点遥控菜单中的初始化开始对频(对频 前确保模型设置中的通道数和接收机一致,以免出错)。对频成功后接收机指示灯会变为常亮。这时代表对频成功。 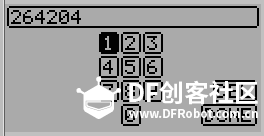 然后再次进入固定ID码菜单,这时系统会随机生成一串数字,直接确定就可以锁定接收机ID码。 这时模型设置就算完成了。之后可以再次编辑对模型图标,模型名称进行进一步修改。 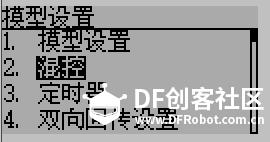 接下来是模型设置的重头戏,混控。 混控就是将需要的输入量根据需要的功能进行混合输出到通道的动作。 D10刷完deviationtx固件后可以将任意开关摇杆进行任意运算输出到任意通道,所以通道基本不存在绝对的对应关系 ,通过设置都可以修改。 在介绍混控功能之前要说一下比例通道和开关通道的表示法。 D10一共有6个比例通道,分别是左右的两个十字摇杆和上放的AUX4 AUX5。 比例通道根据摇杆的位置数据会从-100%变化到100%,中点为0%。一个比例通道会有一个数据值与之对应。 开关通道一共有6个,其中MIX、FMODE为三档开关,RUD、ELE、AIL、GEAR为两档开关。 每一个开关根据自身档位都会对应两到三个数据值。 以MIX为例,一个三档开关对应MIX0 MIX1 MIX2三个数据对应开关拨杆的三个不同位置。当开关拨杆位于0位置时MIX0 值为100%,而MIX1 MIX2均为-100%。 同理位于2位置是只有MIX2输出为100%而MIX0 MIX1均为-100%。 两档开关和前面的道理一样,只是对应的数据为两个。 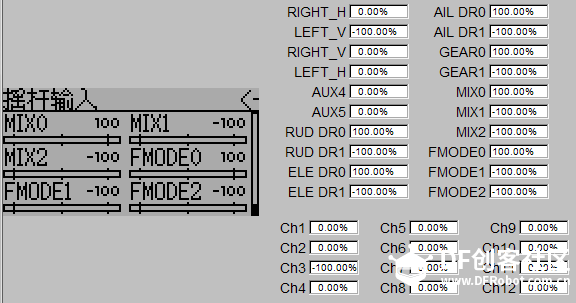 官方的模拟器可以在看到屏幕的状态下同时看到混控输出结果和摇杆输入值。 其中十字摇杆分左、右、水平、垂直表示。比如RIGHT_H代表右侧水平摇杆,LEFT_V代表左侧垂直遥感。 如果是使用遥控器设置,无法在设置时直接看到输入与输出数据,但是在遥控设置-通道监控菜单中,按左右键可以分 别查看输入与输出的具体数值。 接下来具体介绍混控功能的结构和设置方法。 (设置混空时存在拨动摇杆的可能,请将机器断电或者放置到安全位置再进行操作) D10的混控和一般遥控器不太一样,对于他来说一切功能都可以靠自身的混控结构实现,所以本身没有什么三角翼、V 尾之类的混控模式。只要理解了它的混控结构可以说任何想要的混控形式都可以完成,对于格斗机器人来说,只要设 置好大的混控结构,电机接线以及摆放位置都可以不用考虑,上机测试后发现方向不对,调整起来也就是几秒钟事儿 ,非常方便。 先说下混控功能的整体结构。  进入混控选项后会看到上图一样的画面 左边纵向一排的1234分别表示对应接收机的1234通道。上面的升降副翼什么的是遥控器根据对频时选择的协议显示的 通道名称,显示的是接收机默认的通道顺序,这是一个名字而已用于区分通道,纵向中间一排显示的是混控模式,而 最右边的一排代表该通道对应的输入摇杆。 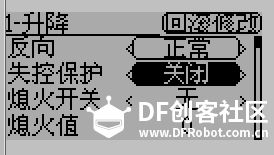 点击通道名称可以进入通道设置,这里除了失控保护其他都不需要进行改动。失控保护按钮点击可以设置是否开启, 开启后可以设置一个数值在接收机无信号的时候输出设置的信号值。 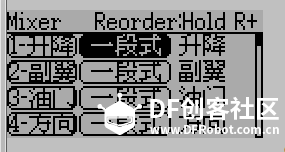 混控模式点击后可以进入混控的设置页,混控模式有一段式,三段式,多段式,CCPM1,CCPM2,CCPM3六种模式。CCPM 为直升机预设混控模式,这里不做讨论。 一段式顾名思义就只有一段。  该模式下会将一个输入量进行比例、曲线调整然后输出到通道 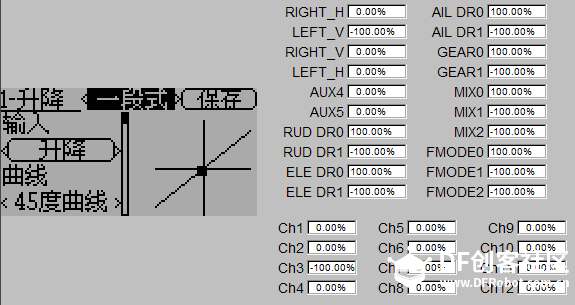 输入当前为升降,即俯仰,是右侧垂直遥感。如果不确定对应关系可以试着拨动摇杆看曲线上点的位置有无变化。 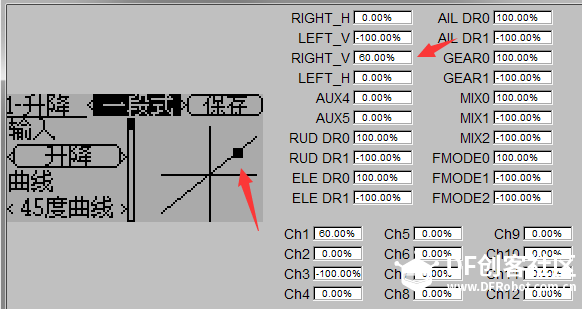 如果拨动时曲线上的点同步变化则表示对应关系正确。 输入选项可以通过左右按钮切换输入值,按确定键可以对输入量进行反向。 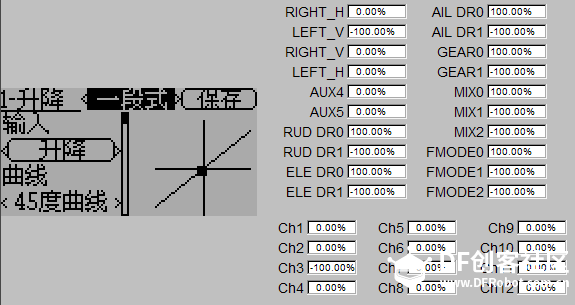 对于新版固件增加了一个更方便的功能,在选择输入量的时候不用挨个选择,只要把光标移动到输入选择区域然后拨 动需要使用的摇杆或者开关即可自动完成设置。 下方曲线选择可以设置45度曲线、最高最低、0最大、>0、<0、绝对值、指数曲线、四区、3点曲线、5点曲线、7点曲 线、9点曲线、11点曲线。 其中指数曲线可以继续详细设置曲率,设置好后要保存才能生效。 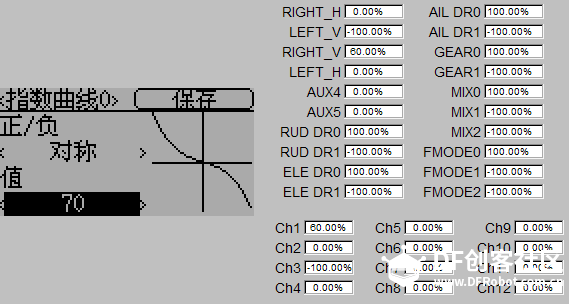 多点曲线也可以分别定义每个点的值将其连贯成曲线。  调整比例会让曲线放大缩小,调整偏移会让曲线上下移动。 一段式功能已经基本介绍完毕,点击保存后即可生效。 三段式和一段式功能上是一样的,可以看成三个一段式,但是增加了开关选项,可以通过开关的设置进行切换三组曲 线。 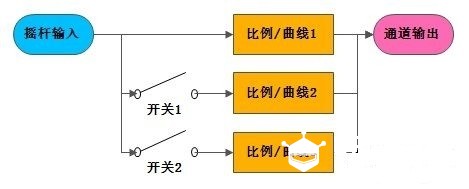 三段式默认具有曲线1,开关1、2用于激活曲线2、3。曲线2开启时曲线1失效,曲线3开启时曲线2失效,两个开关同时 开启只有3生效。优先级逐级递增。 曲线1的设置方法和一段式一样,操作方式也是通用的。三段式一般用于飞行模式选择,这里曲线1的名称为普通飞行 。 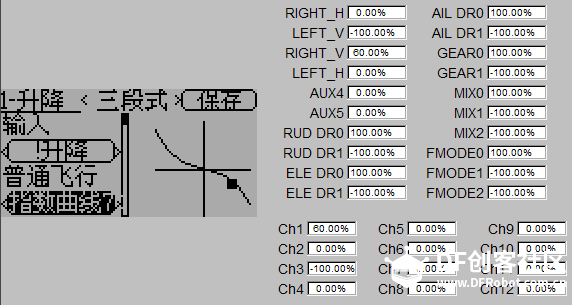 曲线2在设置之前要选择激活的开关  这里表示当FMODE位于1时曲线2生效,曲线2默认名称为3D飞行1,点击3D飞行1标签可以切换曲线类型,可以关联之前 曲线只调整比例,也可以重新设置曲线类型和参数。 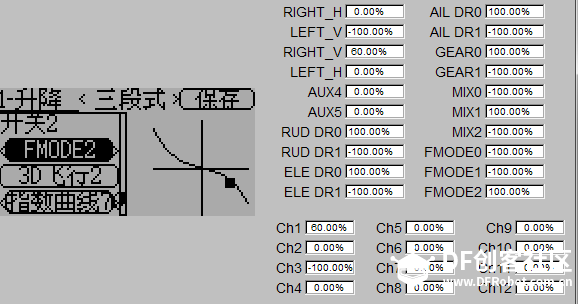 开关2同理,设置好后保存三组曲线就可以根据开关档位进行切换选择了。设置后当FMODE位于0时曲线1激活,曲线2、 3失效,当FMODE位于1时,曲线2被激活曲线1、3失效,当FMODE位于2时,曲线3被激活曲线1、2失效。对于使用混控功 能实现飞行模式调整,通道舵量调节等功能时,三段式混控可以更方便更快捷的实现功能。 多段式混控,实际上才是真正意义上的混控,前两个模式虽然也算混控但实际上对于混合这个概念的表达并不明显, 前面其他区中混控模式都可以通过该模式实现。 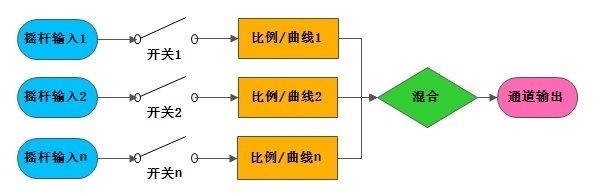 一个通道混控输入量最多可以选择10个,提供替换、叠加(相乘)、附加(相加)、取最大值、取最小值、延时5种混 合方式。替换优先级默认递增。 如果我们有一个差速转向机器人,希望使用左手十字键控制其前后左右移动的话,就需要两个油门与方向联动的混控 。这里油门与方向需要加法运算,具体操作如下 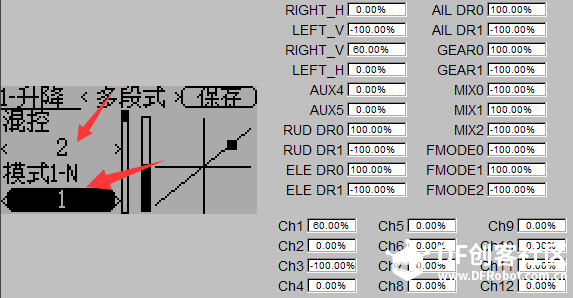 在多段式中设置混控输入量为2,然后从模式中选择1设置第一个输入量。 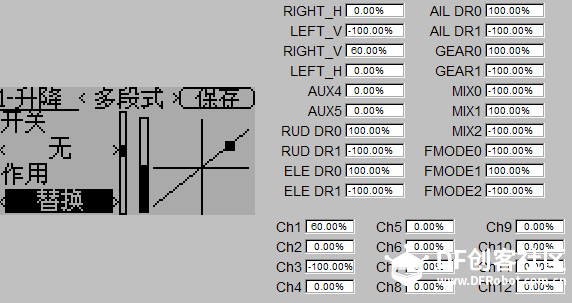 开关 无表示不需要开关即可直接激活,作用替换表示使用当前曲线值替换当前通道值。 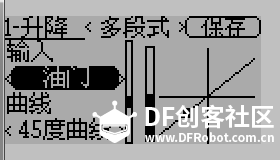 输入改为油门,曲线45度,后面比例和偏移都不用管,曲线1设置完成,这表示我们给该通道通过替换建立了一个45度 的油门曲线:曲线1。  然后将模式1-N设置到2,表示下面要设置曲线2。 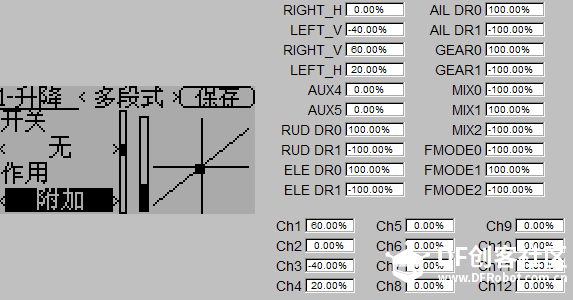 曲线2的作用为附加,开关无,表示任何状态下曲线2都会附加到通道中。  输入量设置为方向,曲线45度,其他的照例不用管。然后保存 这意味着我们又在通道中附加了一个45度的方向曲线。 综合两个曲线来看,我们先产生了一个45度的油门曲线,又在其基础上附加了一个45度的方向曲线。 至此油门与方向联动的混控设置完成。 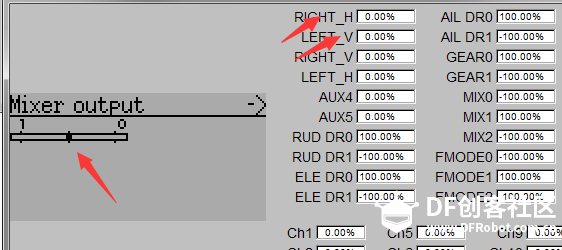 可以通过通道监控查看效果,油门与方向均为0时通道输出为0。 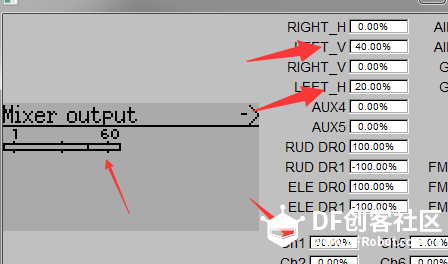 油门40方向20时,通道输出为60。 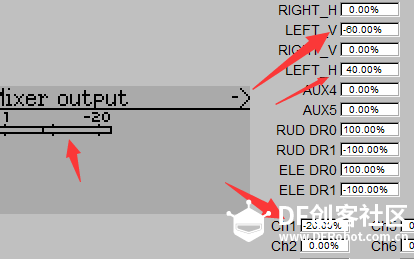 油门-60方向40,输出为-20。 如果我们想要控制一个机器人,只需要建立两个这样的通道,如果电机方向与行驶方向相同,那么两个通道的油门均 为正相,方向则为义正一反。如果不想考虑点击摆放位置和电调接线的话,直接建立两个相加的通道分别驱动左右两 侧行驶。然后轻轻推下遥控器看看两侧轮子动作对不对即可,如果不对也只需要在设置好的混空中对输入信号进行翻 转即可,调整起来只需要几秒钟。 如果我们想在已经设置好的混空中增加舵量控制怎么办。比如我们希望在ELE位于1时让输出信号减半。 只需要再增加一个混控曲线  并通过ELE开关触发,作用设置为叠加  曲线设置为固定 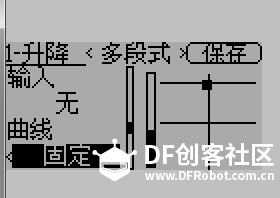 比例设置为50 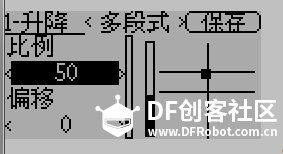 这样我们就建立了一个固定值为50%的数据与当前通道相乘,并只在ELE1时触发。 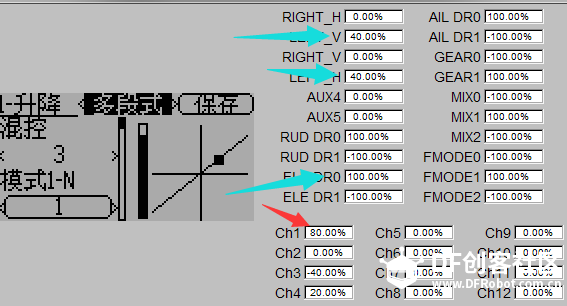 在ELE0时,油门与方向均为40,相加为80,输出为80。 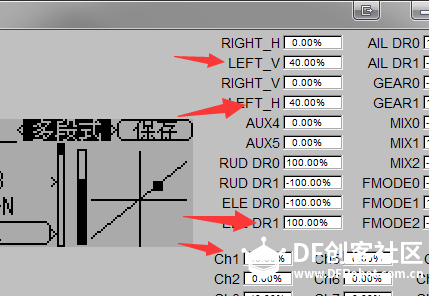 在ELE1时,油门与方向均为40,相加为80,*50%后输出为40。 如果我们还需要一个油门锁0功能怎么办,只需要在建立一个使用开关触发并替换为固定值0的曲线即可。 操作和上面类似,就不发图了。 关于deviationtx固件版本的D10混控教程就到这了,后期有什么需要补充的我会再发上来。 |
mayemmanuel 发表于 2018-3-19 21:40 你看一下这个;https://mc.dfrobot.com.cn/forum. ... &extra=page%3D1 他不是改成了PS2的遥控器么,而且还公布了源代码~ |
焰尘軒 发表于 2018-6-8 21:02 举个例子 设置混控数量3 混控1设置为替换 曲线1 意思就是把当前通道的输出直接变为曲线1 混控2设置为叠加 曲线2 意思就是在当前通道的基础上与曲线2相加 混控3设置为附加 曲线3 意思就是在当前通道的基础上与曲线3相乘 最后的结果就是(曲线1+曲线2)x曲线3 最大最小会输出为当前通道的最大值或者最小值 delay 是保持当前通道数据 并且释放与当前通道相关的所有开关和摇杆 操作这些摇杆不会影响通道输出值 除非delay状态解除 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶