|
13073| 7
|
[入门教程] Max:Bot全球首开箱及安装教程 |
|
首先很感谢DF公司提供的Max:Bot设备,我是第一批用户。公司用快递寄发给我。我用了一个晚上时间,连续拼了两次。第一次是按照正常设计结构搭建,后发现有些地方不是非常合适,于是进行了改进后,再拼,再拍,最后完成了第二种安装。 在之前参加机器人竞赛活动时,我们动手设计机器人主车体,都尽量考虑接驳设备的易拔插和电池更换的便捷,因此接下来,大家将会看到不一样的零件摆放位置。 好啦,这是惯例的开箱图:           Max:Bot零件很多,分类非常齐全,我细细数过,里面还有一些富余的数据连接线,专门用来做扩展用。 以下开始组装车体。  依据个人组装习惯,我会把需要用到的零件拍出来,大家可以先行拿出这些零件。准备开始!    这里要说明一个问题,靠近车尾部的两个支撑柱先不要安装,因为我在第一次安装后发现,把喇叭装在车底部会更节约空间,所以后两个柱子跟喇叭一起组装更合适。请注意我螺丝刀的指示。(请忽略轮胎的出现。:$) 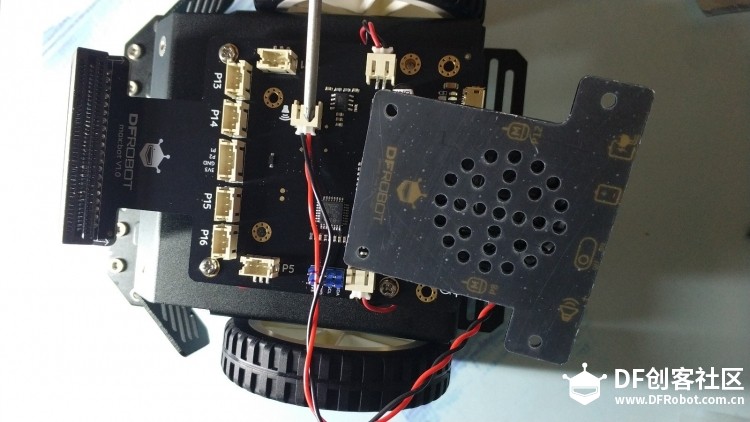 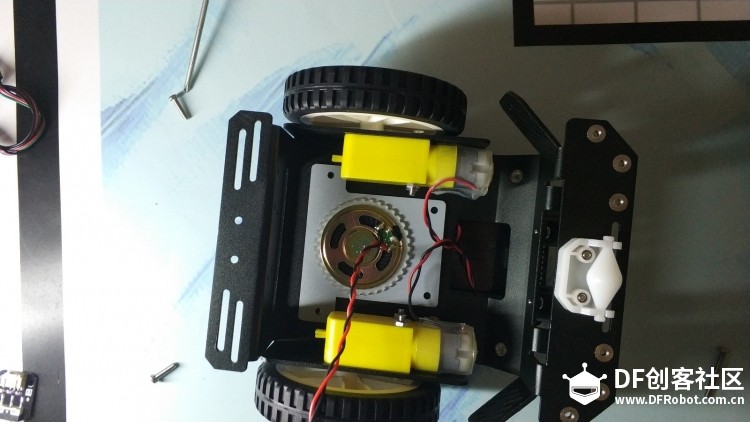 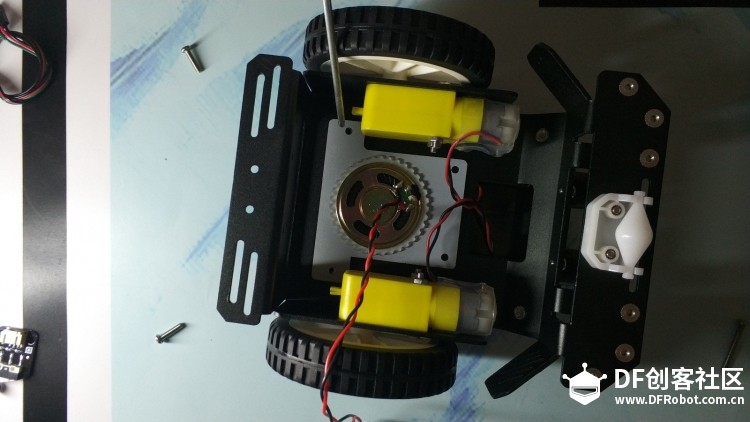 接下来才是轮胎和电机的安装图。 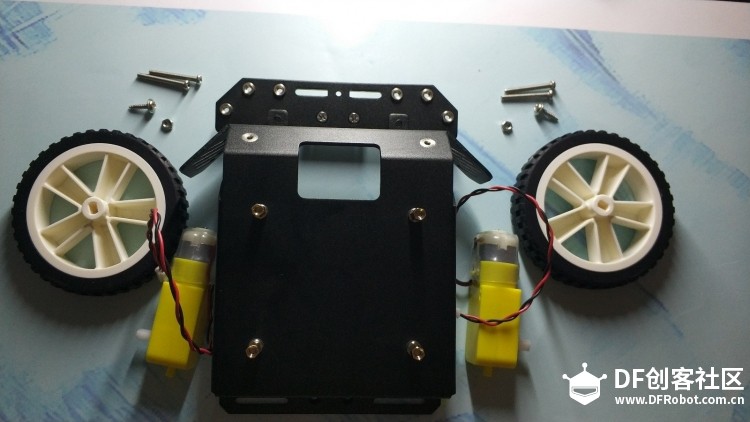 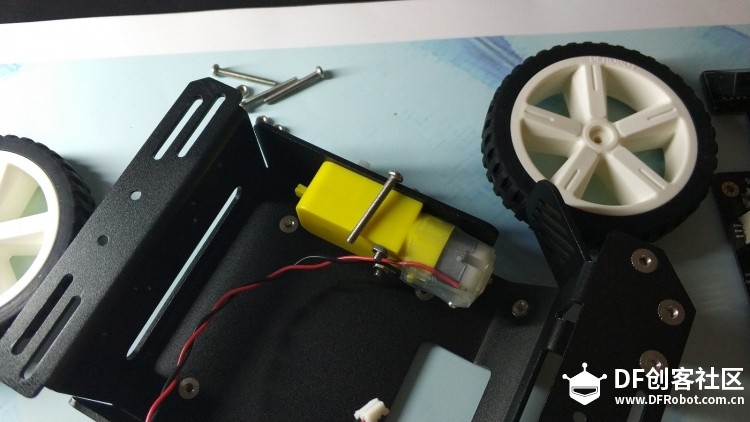 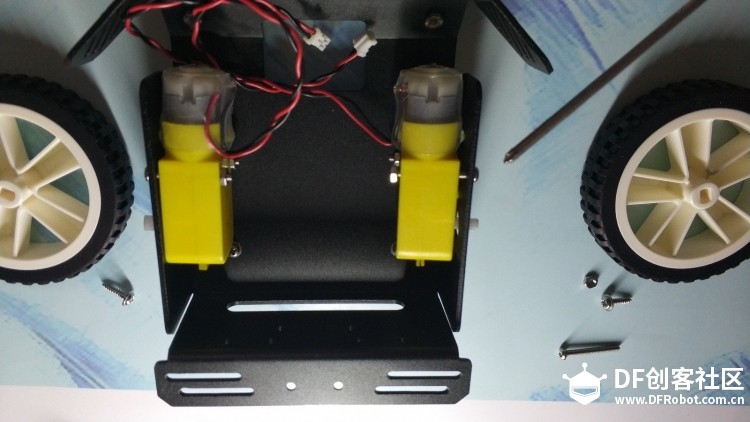      这时,我们已经完成了单个轮子和电机的安装,其实,另一个轮胎和电机的安装步骤相同,我们就不重复上图。 接下来,我们安装万向轮。  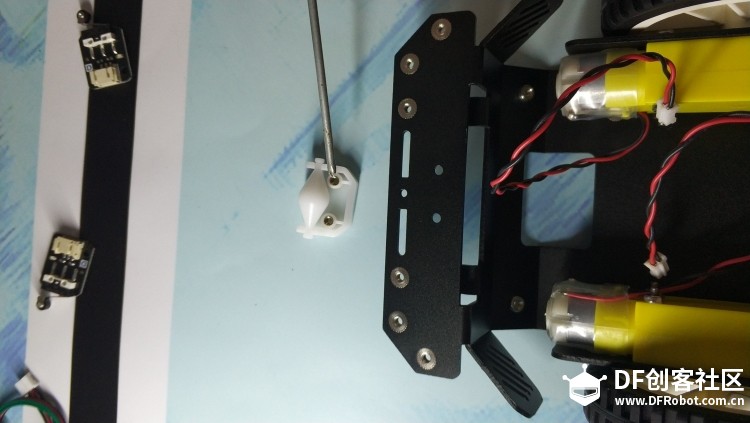 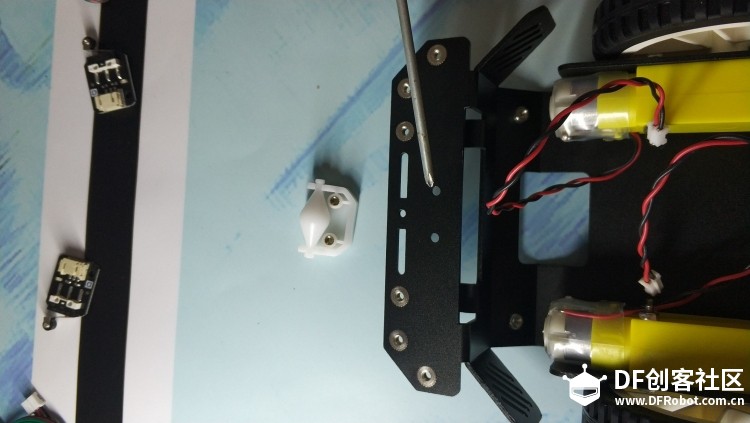 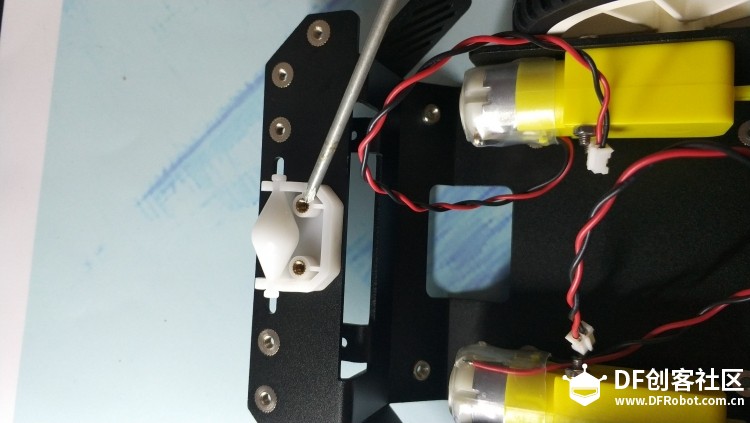 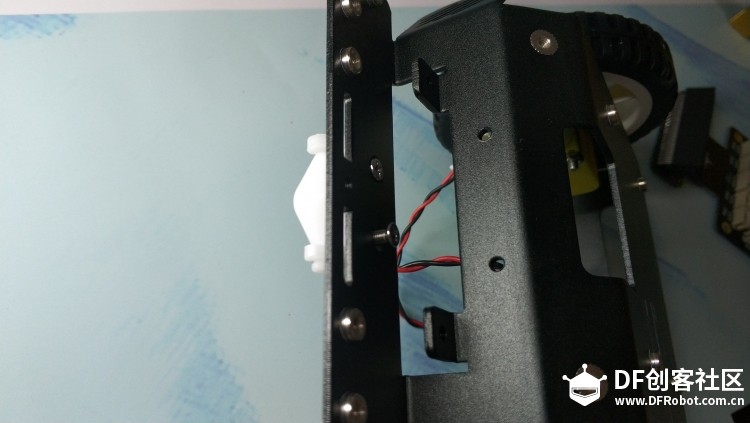 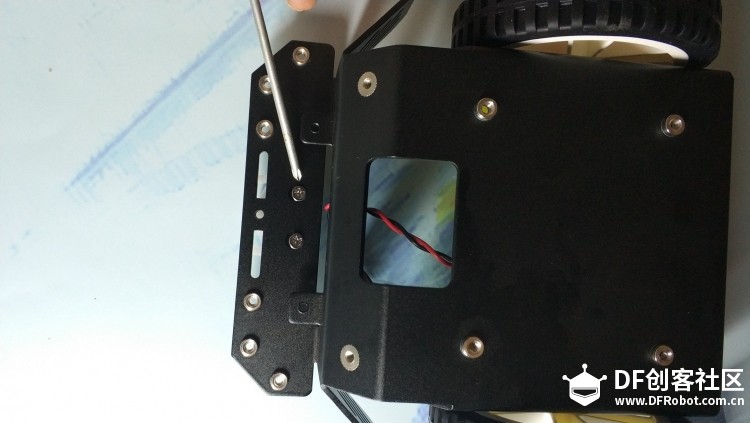 这时,轮子和电机组装全部完成了。 然后,我们就可以把主机板,对准主机体上方的四个孔位,拧上最小的四个小螺丝。 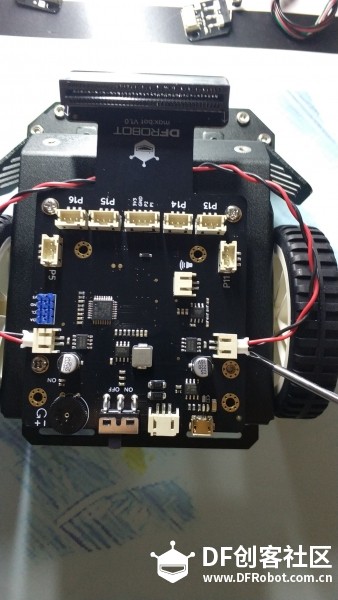 接好主机板之后,再将左右电机电源线,接到主机板的电机接口。 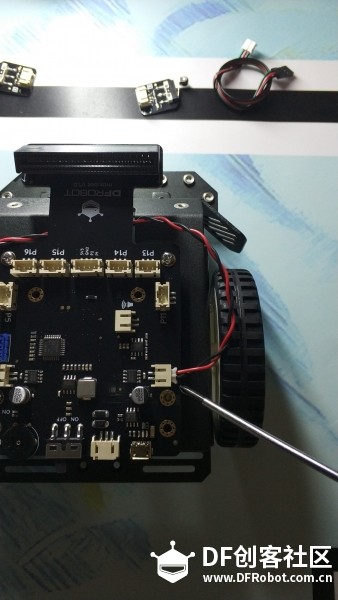 现在我们开始安装超声波传感器。 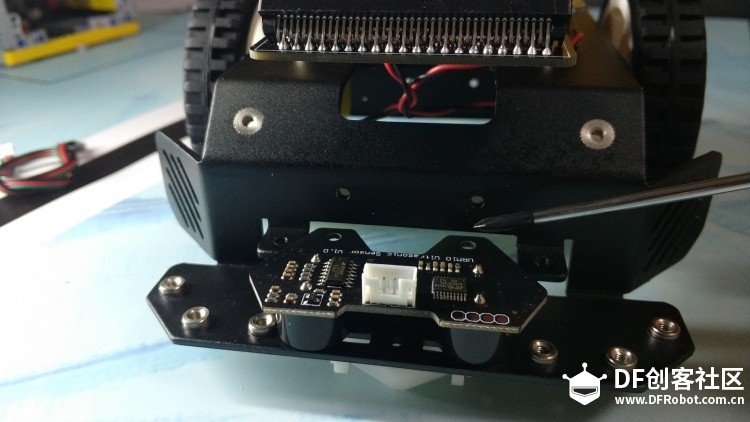 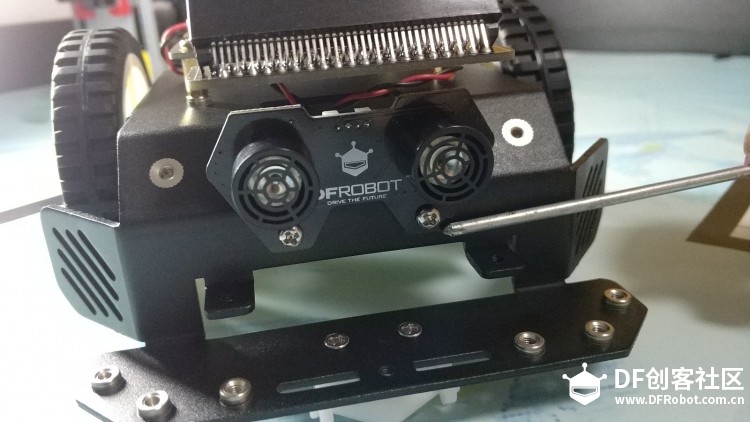 当超声波传感器接上主机体之后,我们要找到数据连接线中的四色杜邦线,按照防呆口,连接主机板和超声波模块。请注意螺丝刀的示意。 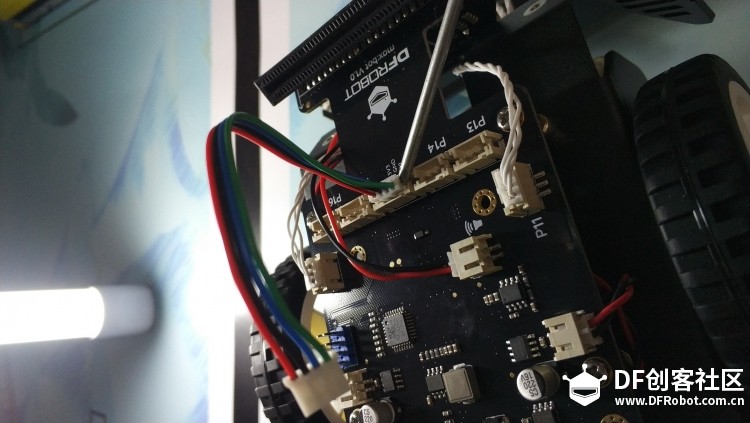  至此,大体的小车形态完成了。然后我们一口气装上左右触碰传感器和巡线传感器。 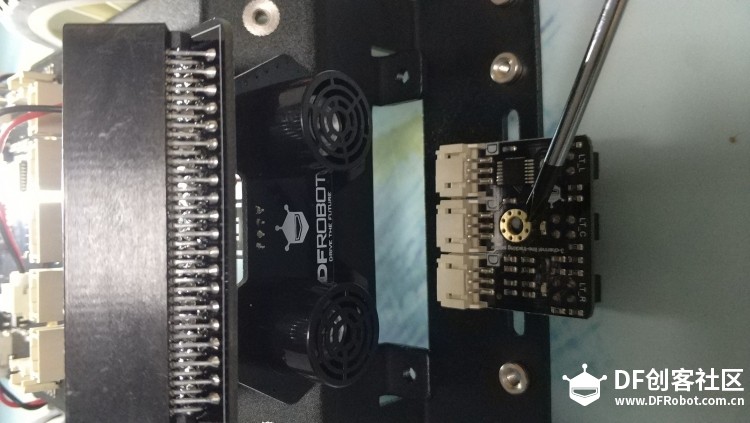 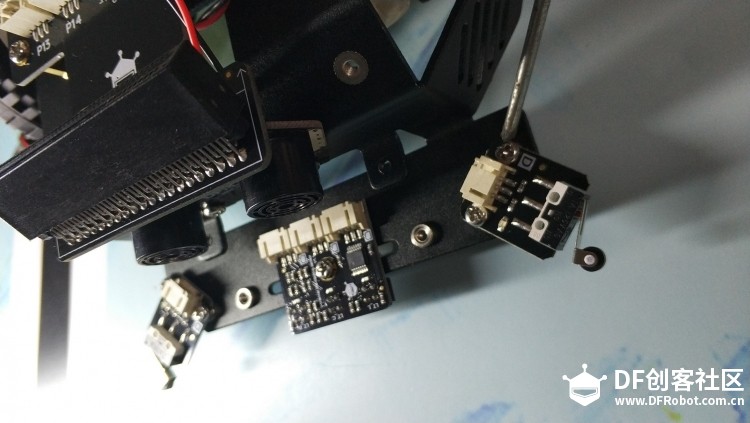 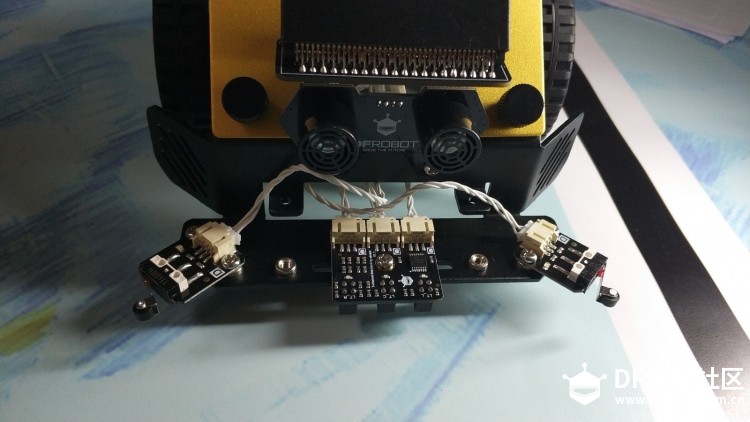 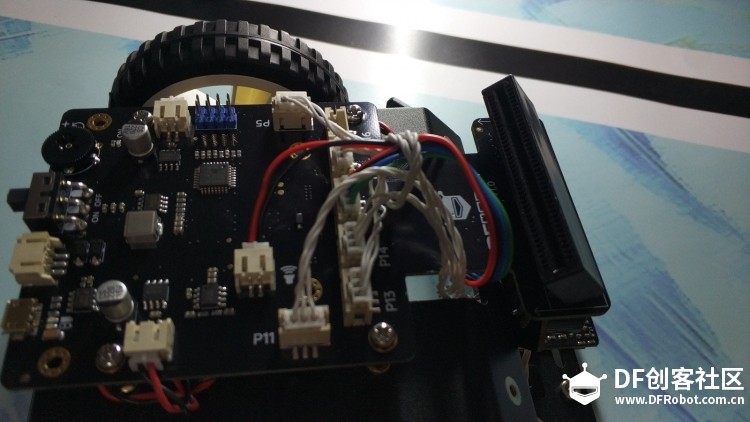 上面的这张,是我随手做的一个理线,因为线材的长短不一,所以为了避免现在暴露于车体之外,影响运行安全和美观,我将其中一根长的数据线缠绕其他的线材2次再插进槽里,这样工整一些。当然,大家也可以用扎带进行捆绑,我主要考虑拔插和更换的速度,万一找不到剪刀时,用扎带就无法剪开,而用捆绑的方法,就能很快解开更换零部件。  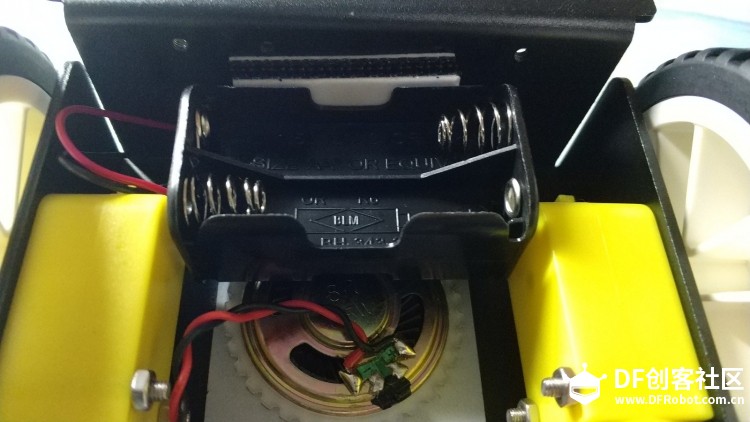 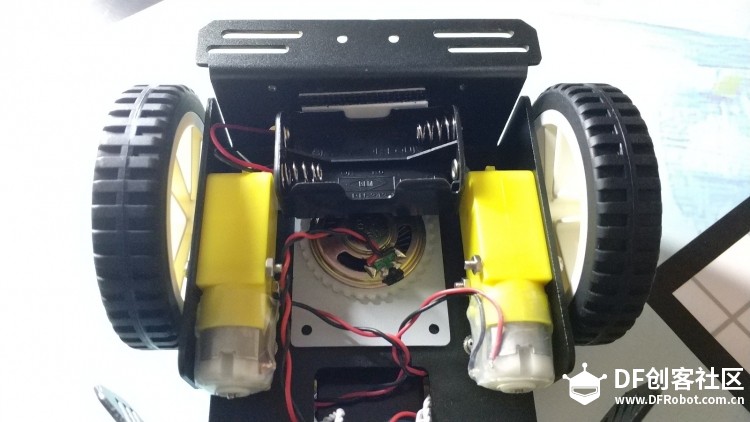 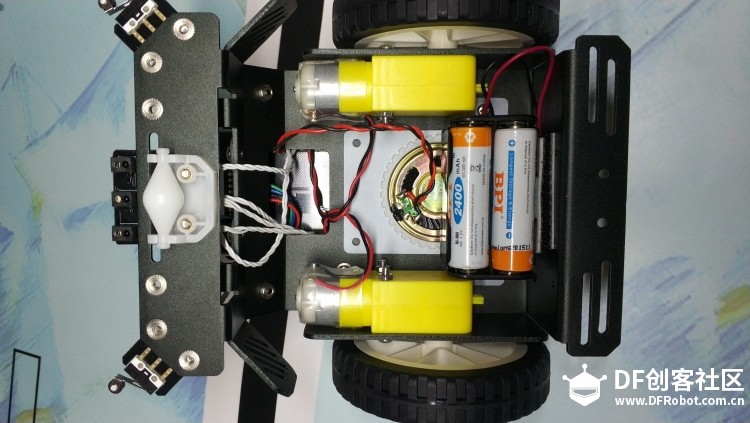 我在电池的安放位置做了一些考量,个人觉得,放在底部可以让车子重心低,这样运行稳,但更换麻烦。 如果安装在顶部,又担心影响其他传感器的安装,因此,我考虑再去购置一个7V的锂电池,塞在车底部,这样相对来说,拔插一次就能更换好电池,而原装的电池盒,需要连续更换4个5号电池,有点麻烦。  最后,图上是安装完后的剩余材料和主车体,这里,我说明一个问题,我是想让小学的孩子尝试学习和使用该设备,因此,安装越简易,维护越方便,Max:Bot尽管已经小巧很多了。可是在高速运行的时候,学生手上如果有汗或者潮湿,容易使车体前部和上部的电子元件触水短路,我后期会和同事尝试用3D打印机做个提把,将车体轻轻提起,这样可以尽量避免上述问题。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶










