|
13755| 0
|
【Mind+】MAX: BOT 机器人探索之旅 第一章 小车快跑 |
|
【Mind+】MAX: BOT 机器人探索之旅 第一章 小车快跑 金灿灿的Max:bot机器人,好神奇呀!是不是已经迫不及待的要和Max:bot玩游戏了,那么先让Max:bot动起来吧! 
电子模块 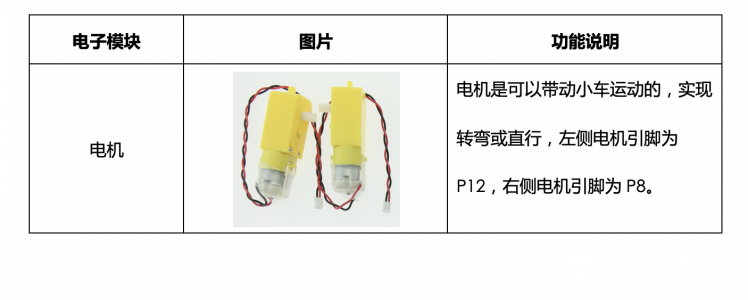 1.1 小车动起来
知识要点 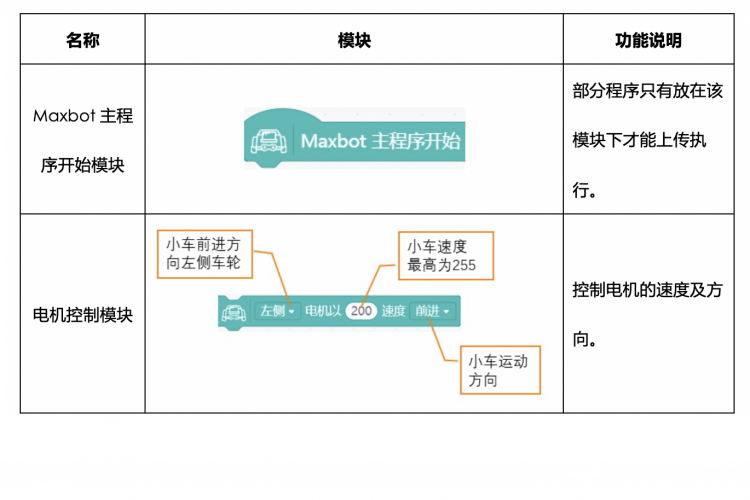 (1)打开Mind+软件,新建一个项目。 (2)删掉不需要的“循环执行”模块。  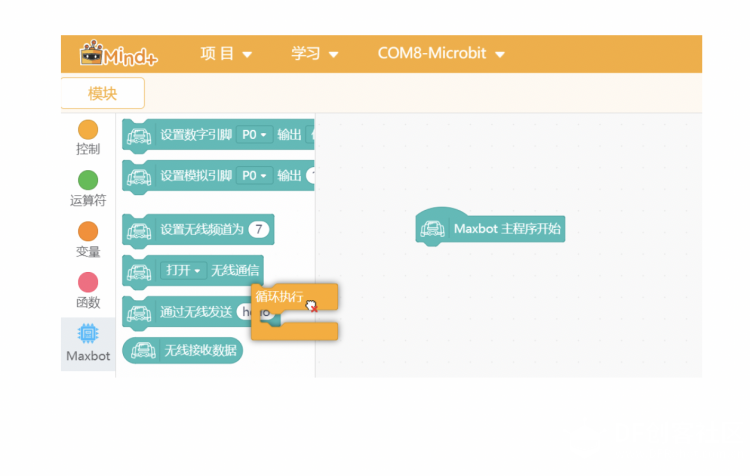   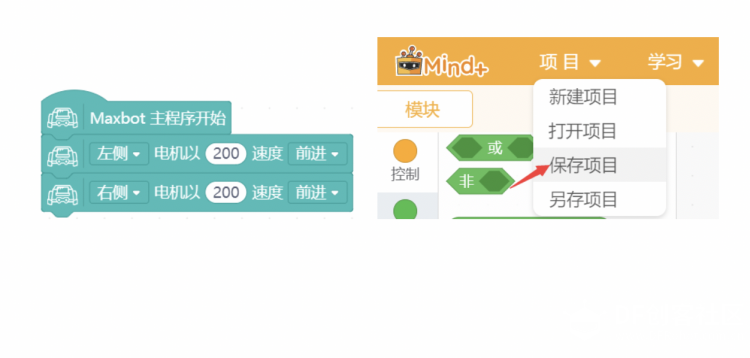 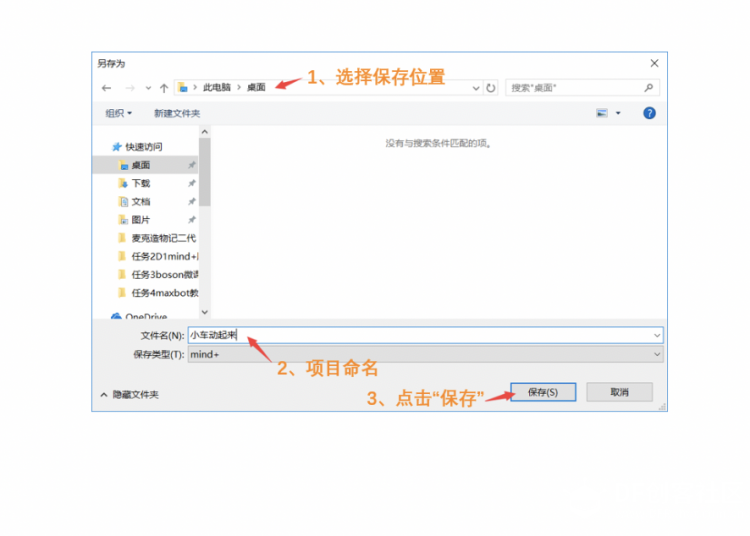 上传程序完成后拔掉接在电脑上数据线,将电池的线接好,打开电路板开关。  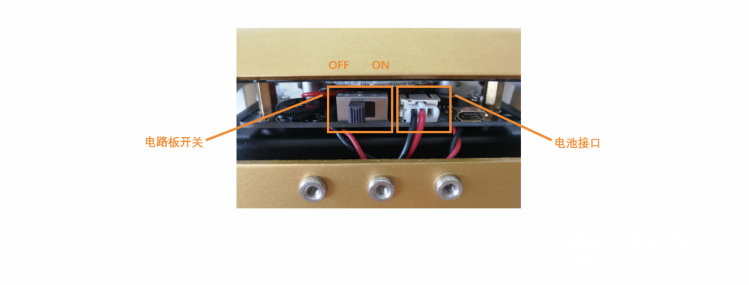 怎么让小车一直低速后退呢?试一试吧。 提示:需要改变电机控制模块的方向和速度,可参考知识要点中对于该名称功能说明。 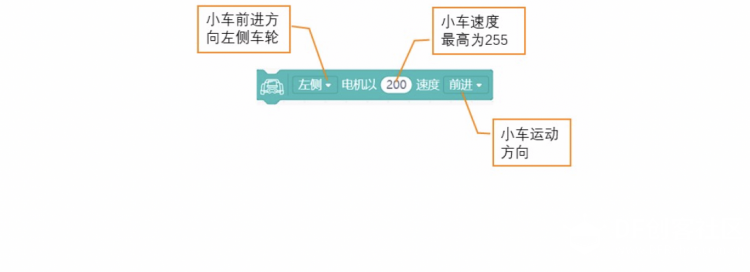 知识要点 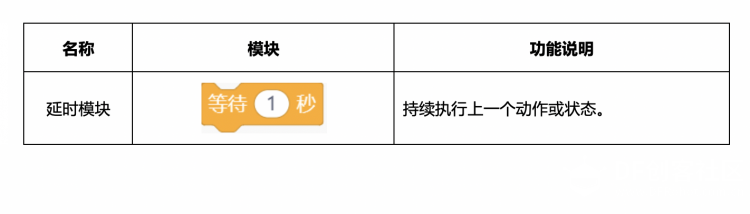 (1) 打开Mind+软件,新建项目。 (2)小车顺时针移动 根据差速转向原理,设置左侧电机速度为200,方向为前进;右侧电机速度为100,方向为前进。 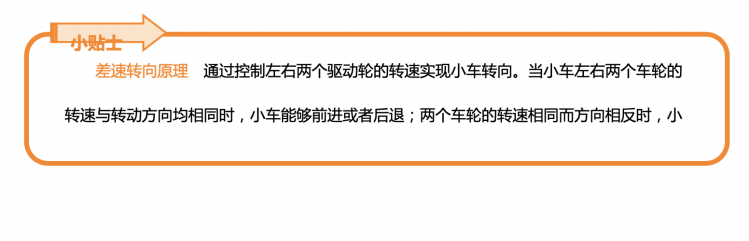  通过延时模块设置等待时间,使得小车行进路线为一个完整的圆形。   设置左侧电机速度为0,方向为前进;右侧电机速度为0,方向为前进。完整程序如下。  探究思考 小车的左右两个电机在不同速度差和不同方向下,小车的运动状态应该如何呢?不同速度差下的小车行 进路线是否有变化呢?按照第1组的例子,动手编写程序完成下面表格吧! 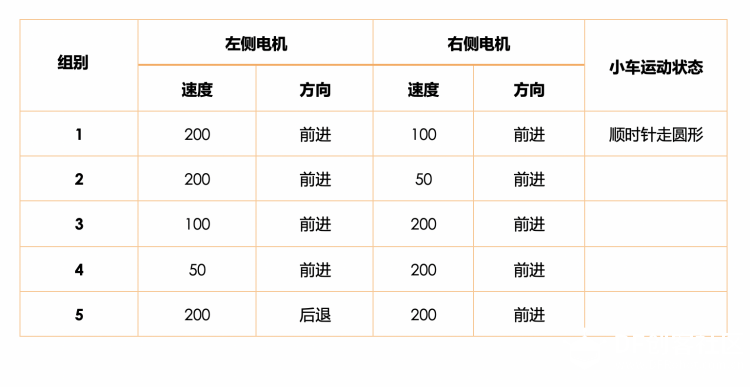 知识要点  (1) 打开Mind+软件,新建项目。 (2)下图是小车的行进路线,我们可以将小车走方形的过程分成两部分:小车直行 和小车转90度角,通过观察路线我们可以发现小车只要完成4次直行转90度就可 以走一个完整的方形啦! 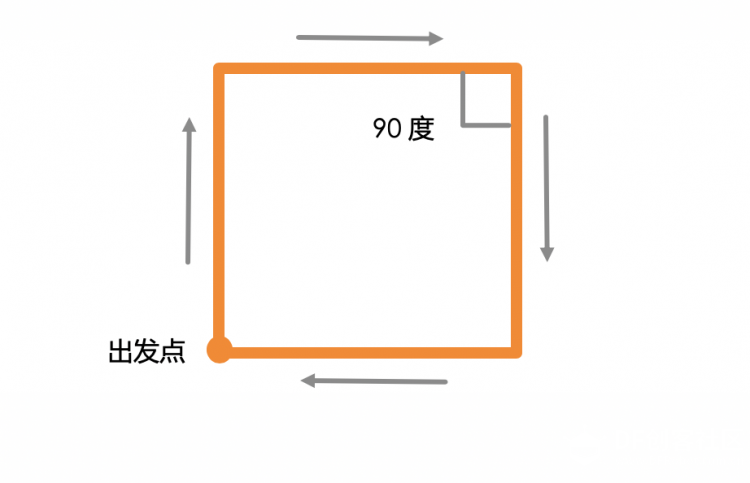  针转过90度角,需要小车右轮不转,左轮转动,小车实现转弯。  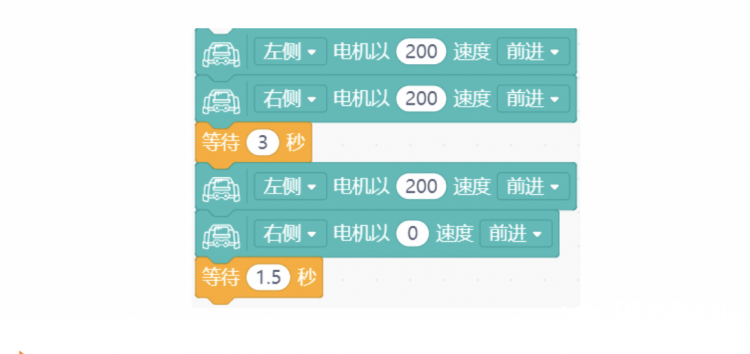 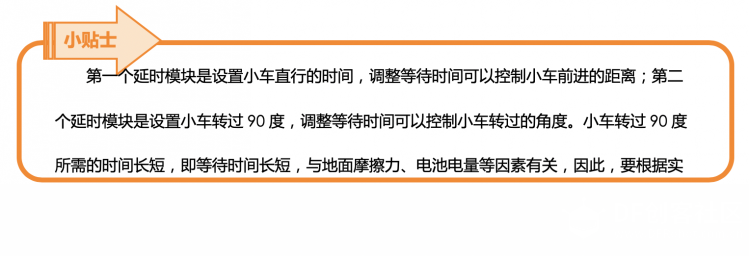  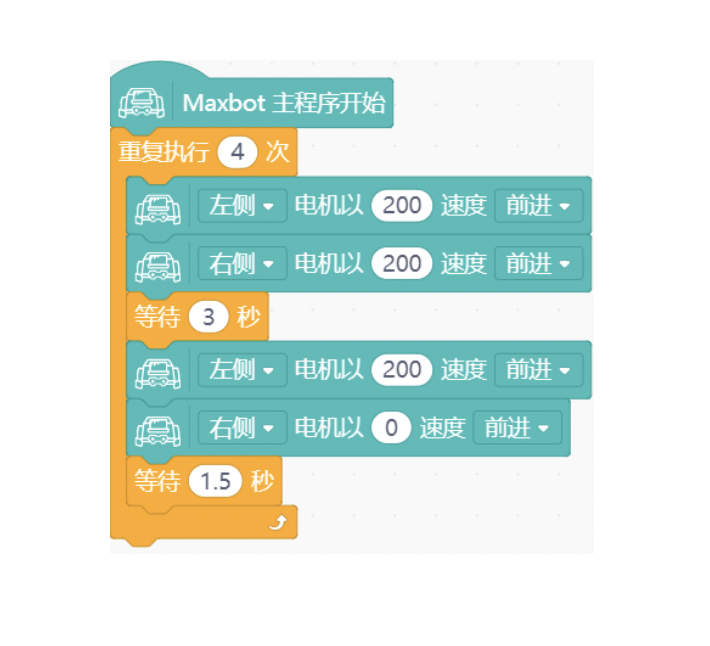 最终完整程序如下:  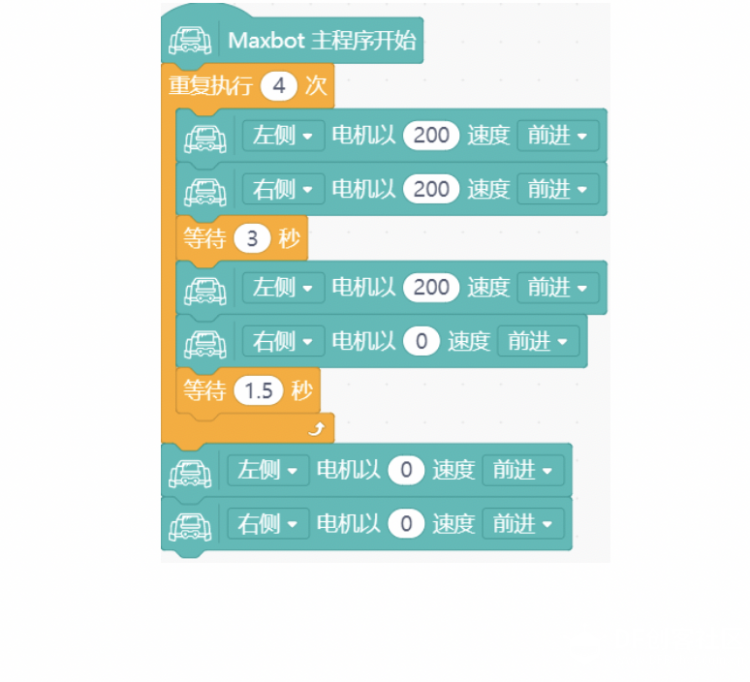 尝试一下使用循环模块代替重复执行模块后,观察小车是怎么运动的呢?  怎么让小车可以走三角形呢? 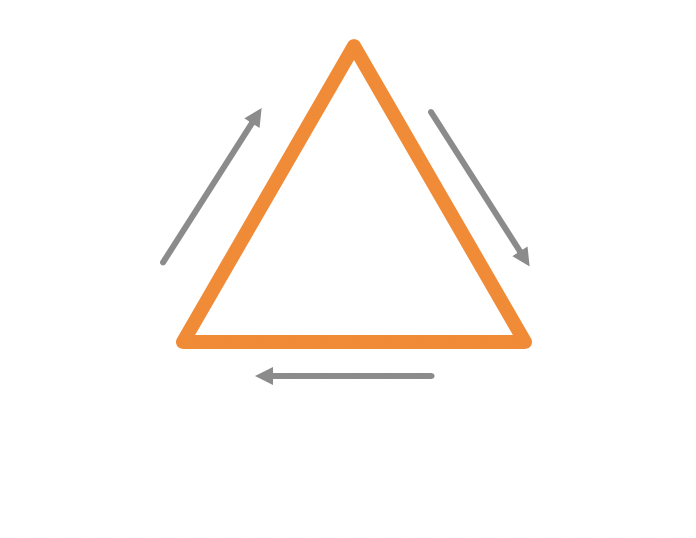 目录牵引: 【Mind+】MAX: BOT 机器人探索之旅(系列教程)导航帖 【Mind+】MAX: BOT 机器人探索之旅 MAX: BOT组装教程 【Mind+】MAX: BOT 机器人探索之旅 第一章 小车快跑 【Mind+】MAX: BOT 机器人探索之旅 第二章 感光的眼睛 【Mind+】MAX: BOT 机器人探索之旅 第四章 秘密武器超声波 【Mind+】MAX: BOT 机器人探索之旅 第五章 勇往直前的MAX: BOT 【Mind+】MAX: BOT 机器人探索之旅 第六章 无线通信 【Mind+】MAX: BOT 机器人探索之旅 第七章 声光互动  mind+官网:https://www.mindplus.cc Mind+最早是由DFRobot公司于2013年推出的图形化编程软件,能够让不懂编程的艺术家们通过几分钟的学习即可控制Arduino开源硬件,从而拓宽一些新的思维方式。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






