|
1032| 0
|
[ESP8266/ESP32] FireBeetle 2 ESP32 P4跑pycoClaw:聊天就可以控制硬件 |

|
本帖最后由 仔爸 于 2026-4-25 22:15 编辑 最近有幸拿到了DFROBOT的Esp32 P4和扩展板套装,看到esp32性能越来越强,我除了尝试将它用于普通的控制各类传感器和执行器之外,还想试试与人工智能相关的内容,比如这次我打算尝试在它上面跑PycoClaw。 一、硬件、软件简介 1.简介ESP32 P4  FireBeetle 2 ESP32-P4是一款基于ESP32-P4R32芯片设计的高性能微控制器(MCU)开发板,支持单精度FPU和 AI指令扩展,具有强大的AI处理能力。同时,开发板也拥有强大的图像处理能力,最高支持1080p@30fps图像采集和显示。开发板集成了ESP32-C6模组,扩展了WiFi和蓝牙功能,适用于AI网络摄像头、AI机器人、智能家居中控屏幕、电子相册等多种应用。 具体详见https://wiki.dfrobot.com.cn/SKU_DFR1172_FireBeetle_2_ESP32_P4 2.简介PycoClaw  PycoClaw 是一个基于 MicroPython、专为 ESP32(特别是 ESP32-S3 / P4)打造的开源嵌入式 AI 智能体平台,核心是把 OpenClaw 标准的 AI 代理能力,搬到几块钱的单片机上跑。
二、准备工作 要在FireBeetle 2 ESP32-P4上使用PycoClaw,我们需要首先把固件刷入硬件。请按照以下步骤进行: 第一步:使用USB数据线连接电脑与ESP32 P4,如连接不成功,可能需要安装驱动程序(如CP210X驱动) 第二步:用浏览器打开网址https://pycoclaw.com/ 单击“Install Now”按钮,如下图。  第三步:单击“Connect Device”按钮,在弹出的连接对话框中选择ESP32 P4对应的COM口进行连接。 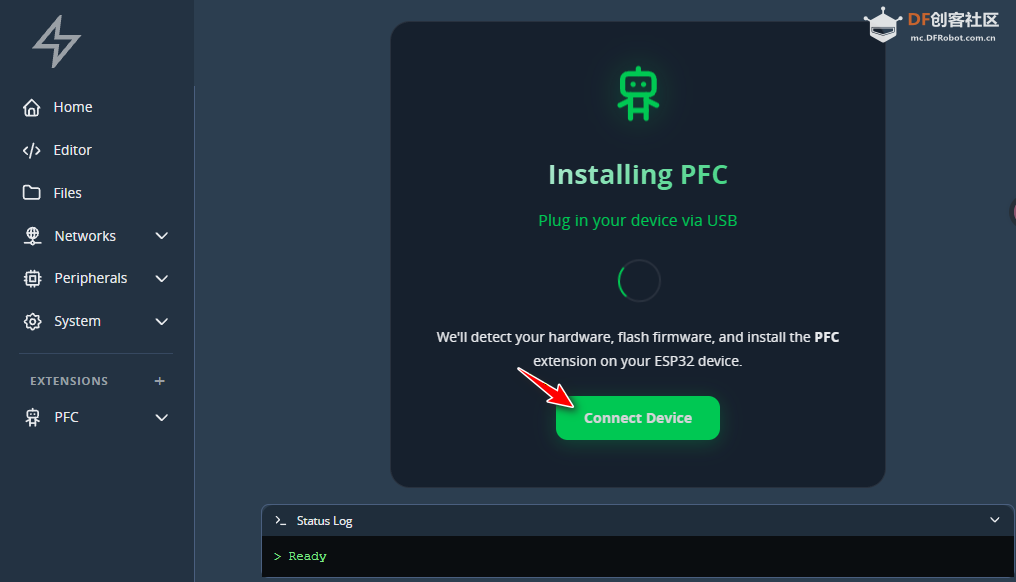  第四步:成功连接后,出现硬件信息,我们选择刷入对应的硬件型号。 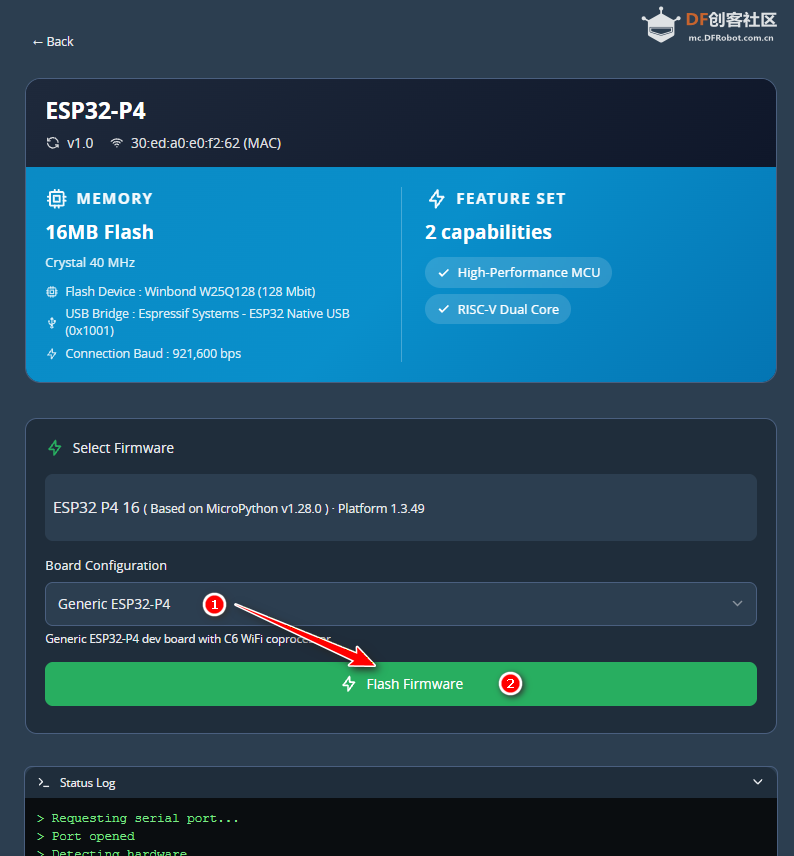 第五步:然后开始固件烧录,等待烧录进程到100%。 第六步:配网。ESP32 P4需要连网才能调用网络平台上的大语言模型的API来工作。配网前选重启一下ESP32 P4(重启设备后仍需要按第三步那样进行连接)。连接成功之后,会弹出如下图所示的对话框。 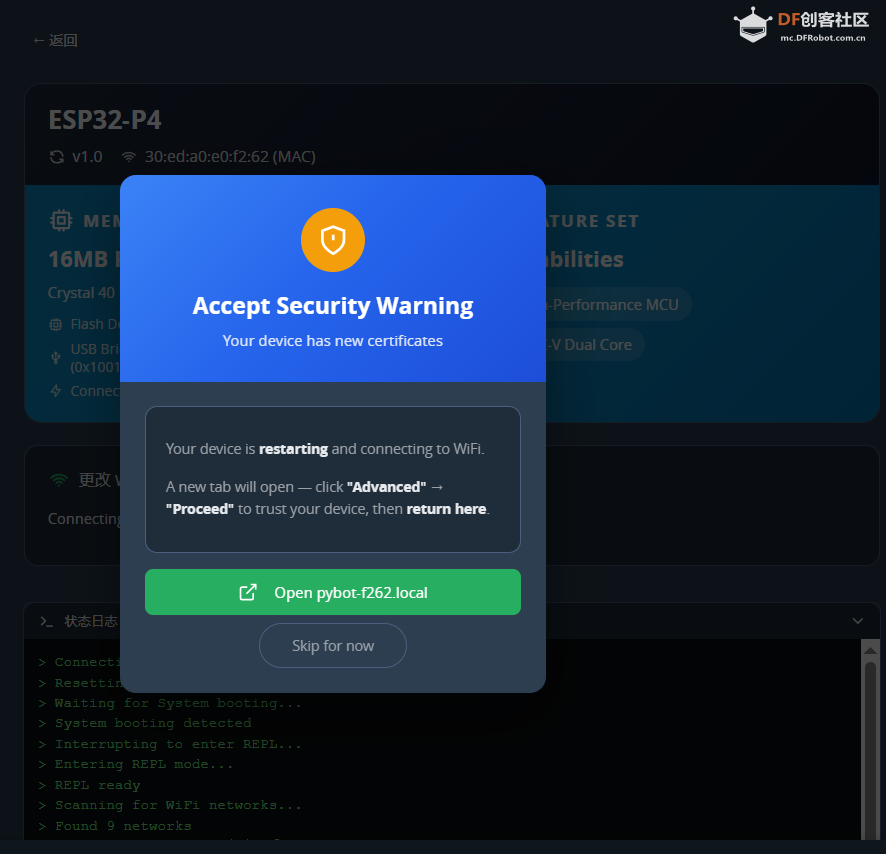 第七步:单击“Open pybot-f262.local” 按钮(前面的pybot-f262会根据每个人的电脑不同提供不同的标识),然后进入一个页面,单击1处的“高级”按钮,然后单击下面的继续前往。  第八步:配置证书,设置密码。在弹出的对话框中输入密码,完成配置。注意可以记下IP地址,在不能使用设备地址的时候用IP代替。  第九步:单击完成设置按钮后,就跳转到连接对话框。输入刚才设置的密码进行连接。假如使用设备地址不能用,则将下图划线的部分用上面的IP地址替换。 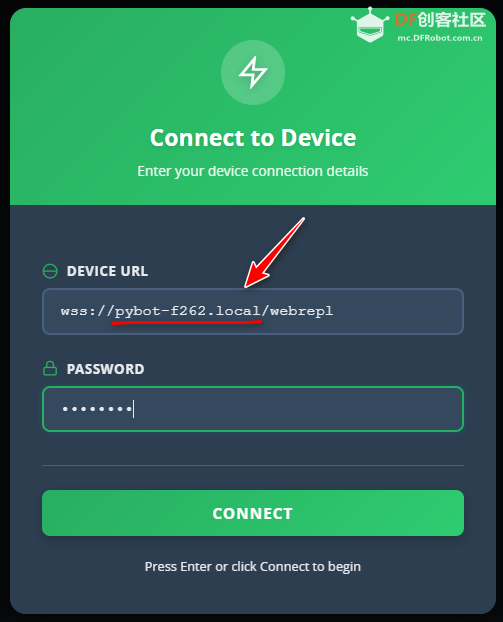 第十步:开始使用。如下图所示,左上角的闪电标志变亮,底部状态栏显示 ESP32 P4当前的运行状态信息,表示已经成功连接。我们就可以通过这个在线IDE使用 MicroPython语言为 ESP32 P4编程。 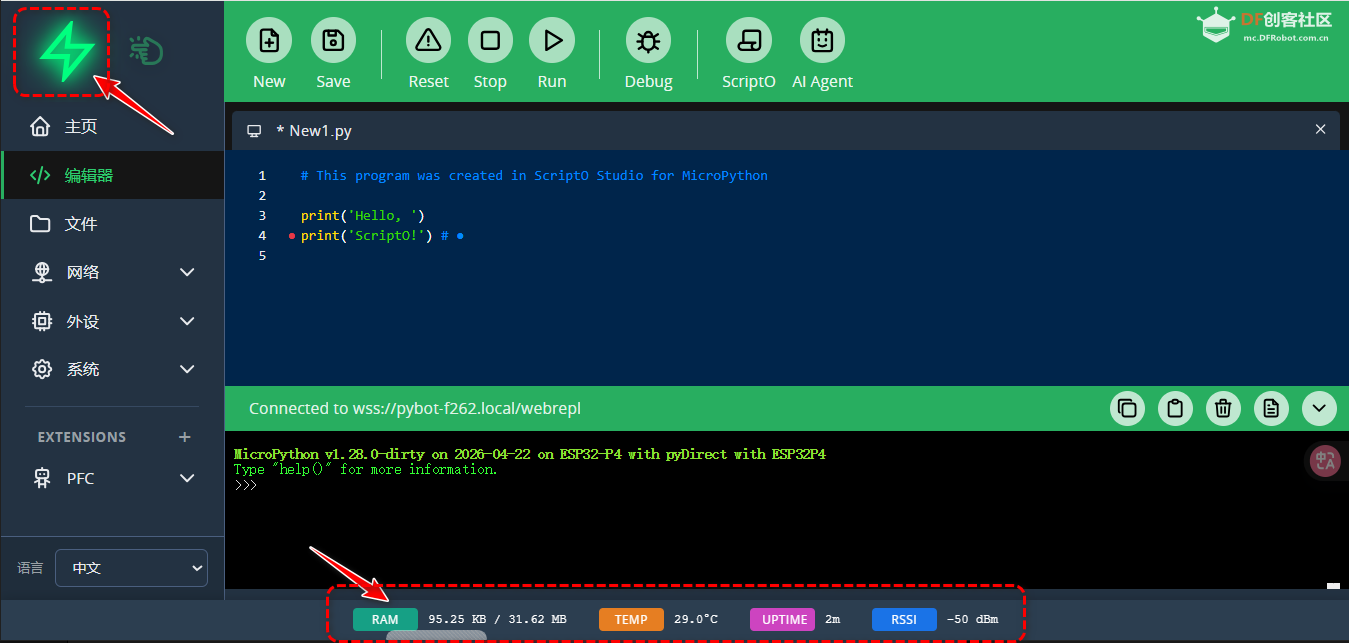 三、添加AI助理。 根据 PycoClaw的官方文档介绍,它的最大特点是让ESP32独立跑 完整 AI 智能体循环,前提是需要接入大型语言模型(LLM)并理解你的请求并生成合适的响应。 单击左侧任务栏中的“系统 > AI助手”,在右侧选择一个大语言模型,配置其可用的API。 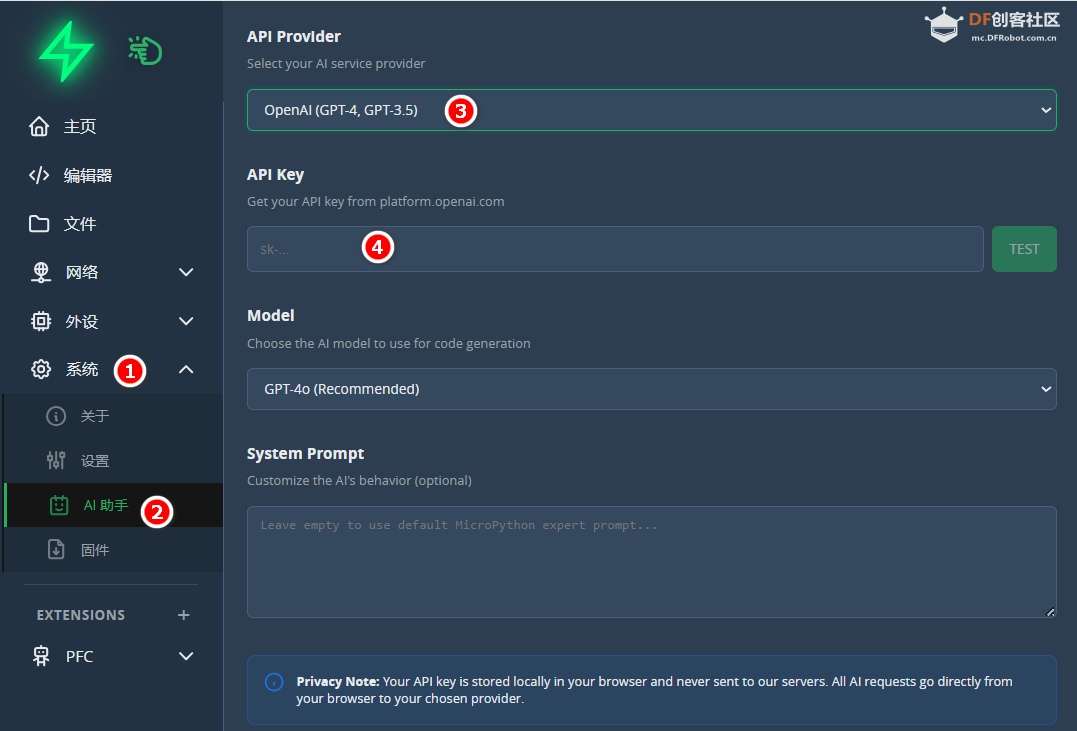 这里提供了以下几种大语言模型的选择。由于我没有这些大语言模型的API,所以无法尝试。 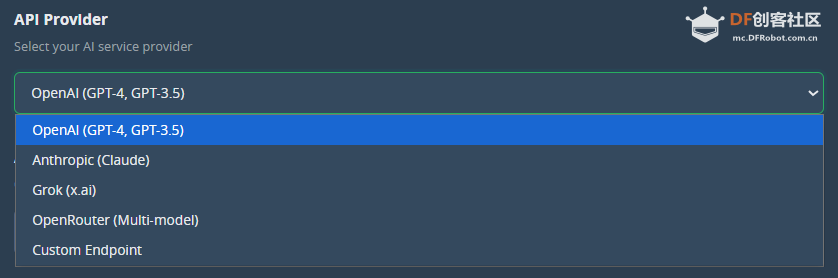 如果你成功进行了配置,那么接下来单击左侧任务栏的“编辑器”,然后单击顶部最右边的“AI Agent”按钮,右侧弹出AI Agent对话框,就可以与刚才设置的大语言模型进行对话,并对ESP32 P4进行编程。 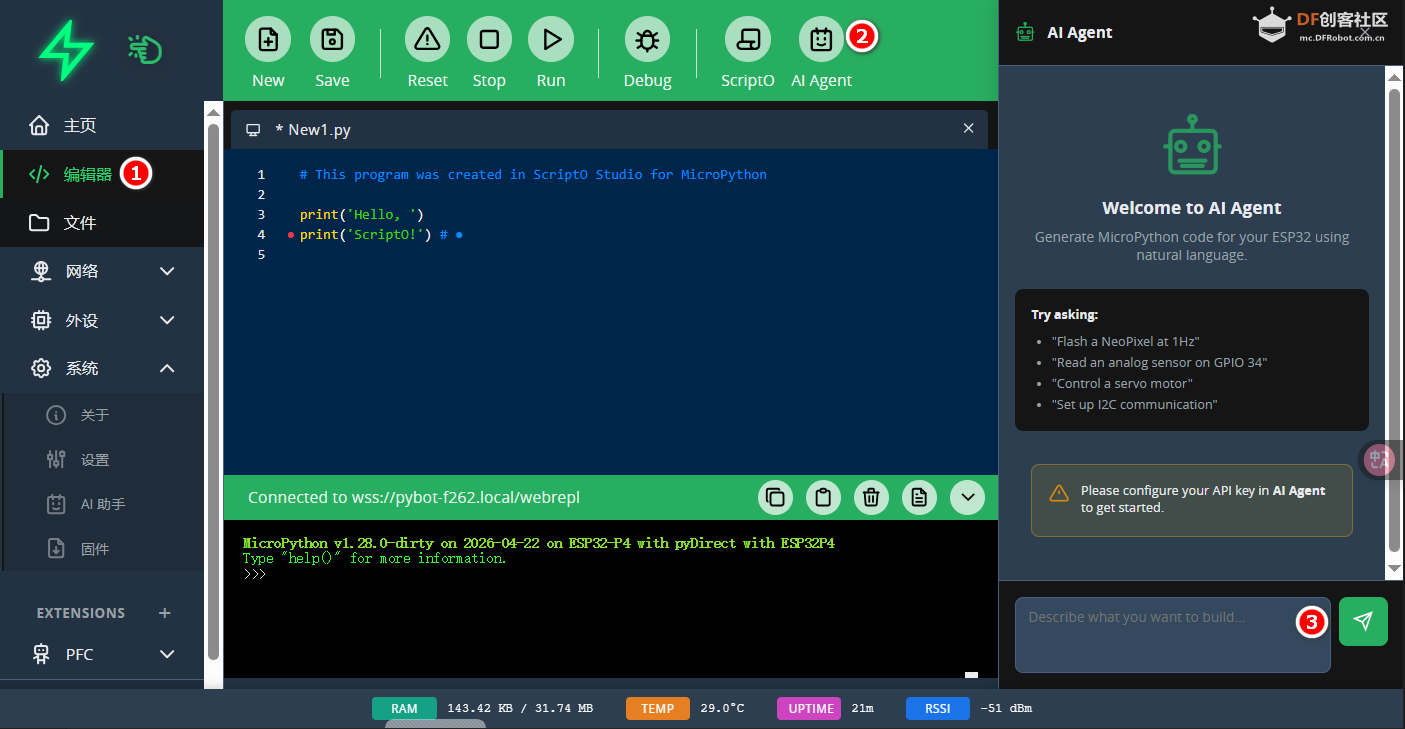 你可以输入如下这样的命令 "Blink the LED on GPIO2 every 500ms" "Read temperature from the BME280 sensor on I2C" 代理会生成带有代码和解释的响应,通过动作按钮配置或使用代码。 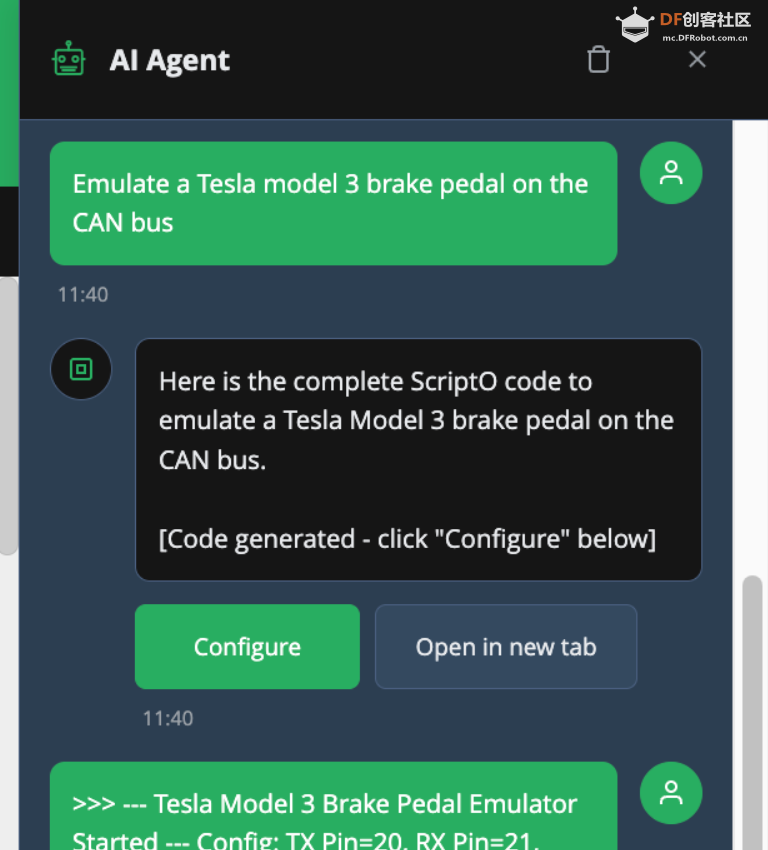 因为我没有OpenAI等可用的API,所以我尝试通过另一种方式来启动与大语言模型的对话。 四、使用PFC扩展 1.添加PFC扩展 ScriptO Studio提供了一些扩展,通过 JS 配置器模式为 ScriptO Studio 添加了新功能——JavaScript 类提供自定义界面面板和设备端 Python 库。比如这里我们通过左边任务栏的“EXTENSIONS"右边的加号打开对话框,然后添加”PFC“扩展。 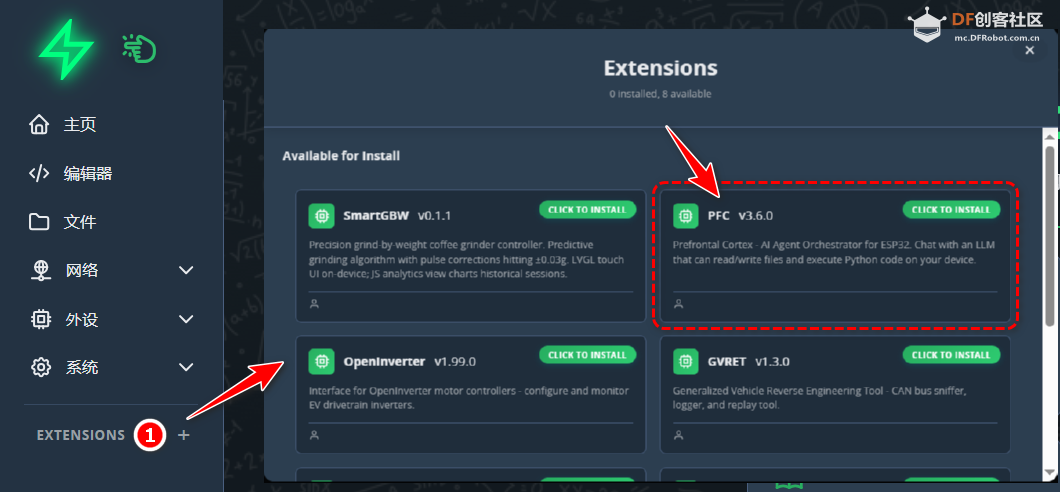 经过一段时间的等待,当扩展安装成功之后就可以在左侧任务栏的下面找到该扩展。  2.配置PFC 首先我们配置PFC扩展要调用的大语言模型。这里的配置要比AI助手更加灵活,有更多的选择。在此我以智浦清言开放平台的GLM-4.7模型为例(可以免费使用几百万TOKEN,请自行取得API) 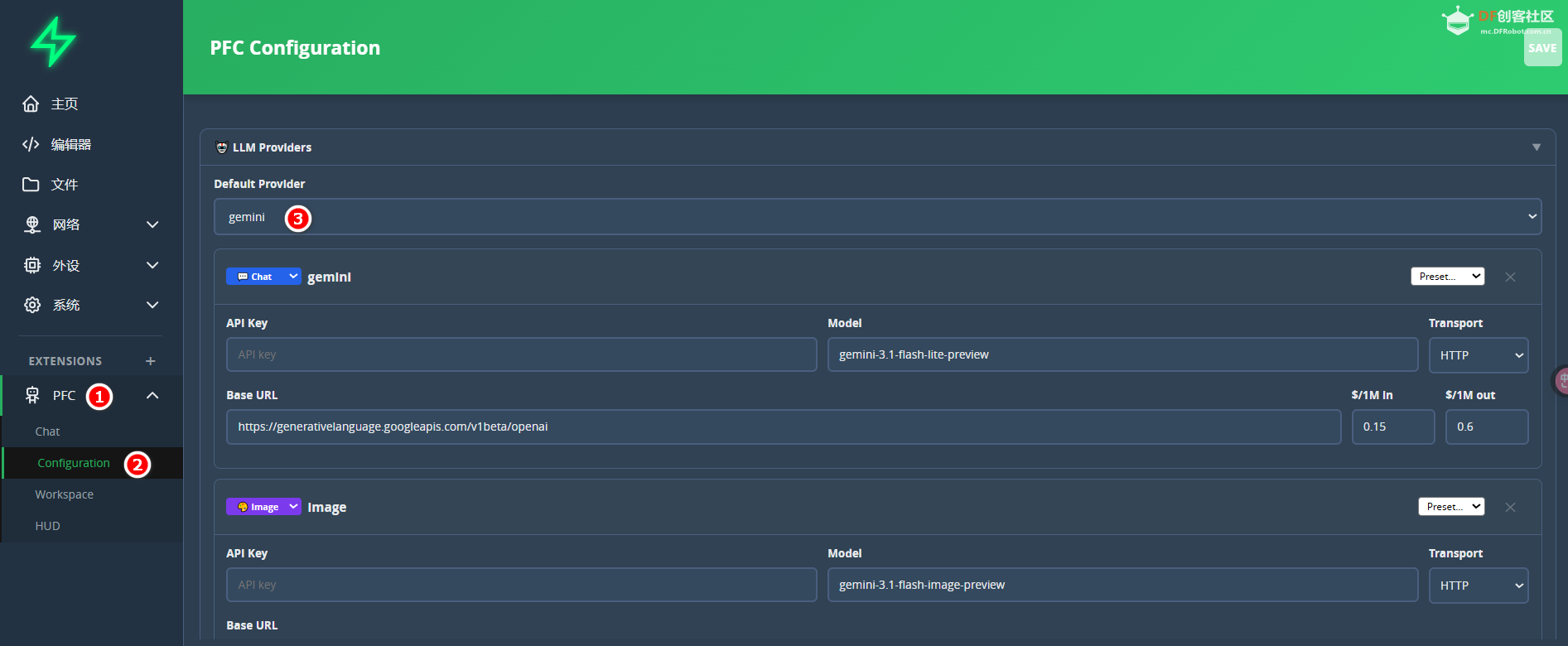 右侧往下找到并单击”Add Provider“按钮,添加一个自定义的调用 ,在弹出的对话框中为该调用取个名字,如”GLM“。 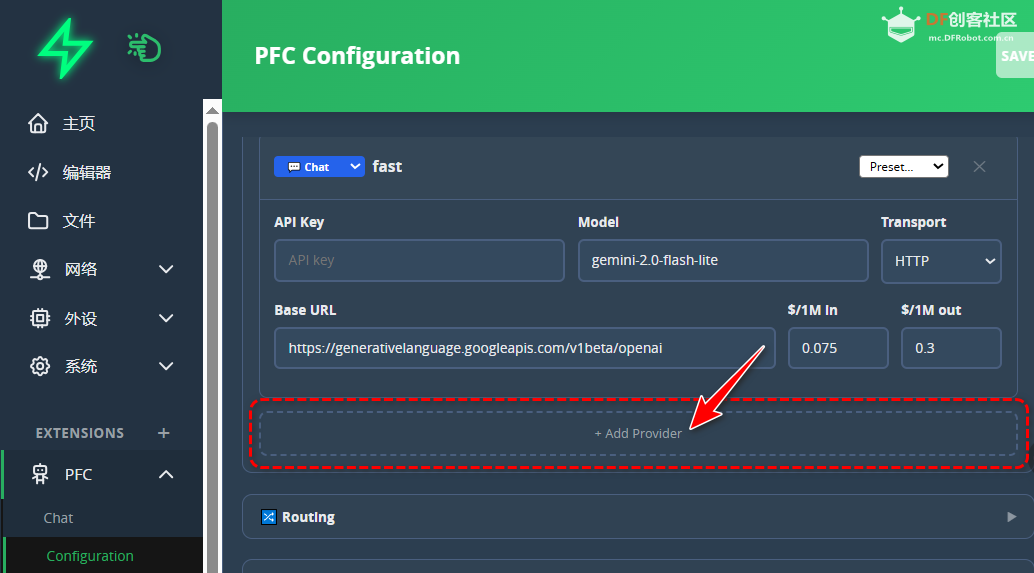 然后填入API,模型名称(哪个有免费额度优先用该模型名称),调用URL等参数,然后先单击一下右上角的”SAVE“按钮。右下角4处填入的是消耗token的单价, 我这边是免费的,就填0。你如果使用的是收费的,按标价填,这样可以在驾驶舱(HUB)中查看用量。 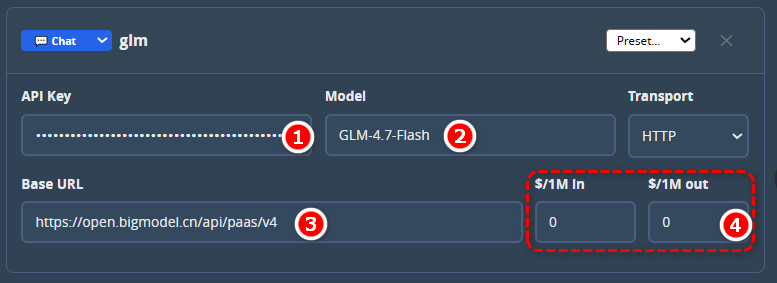 在设置界面的顶部选择我们刚创建的GLM模型,再次单击”SAVE“按钮。 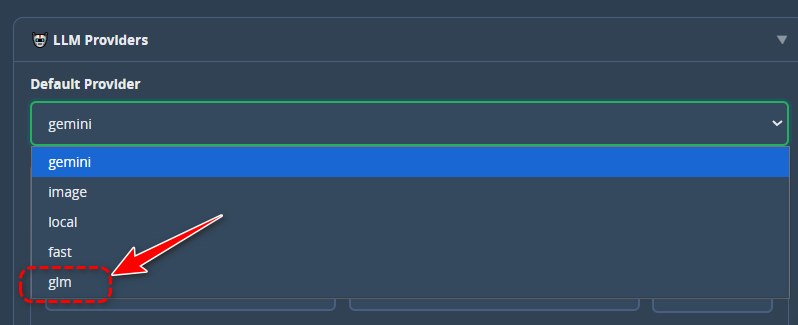 3.添加技能skills 添加技能是为了能在PFC中高效使用和控制物理硬件。 单击左侧的“编辑器”,然后在顶部单击“ScriptO"按钮 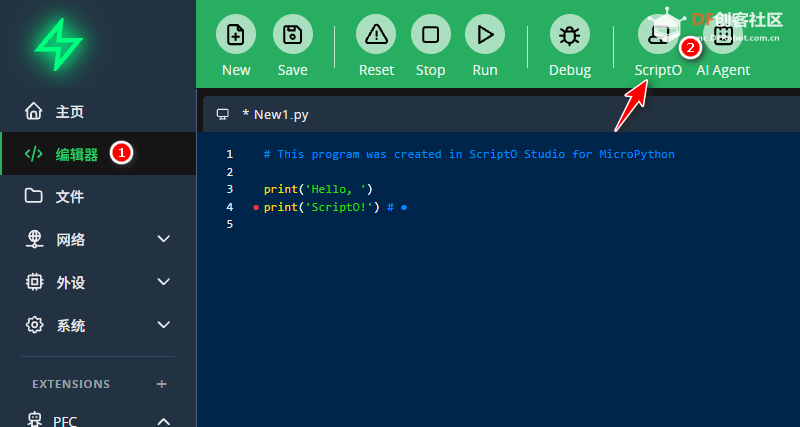 在弹出的对话框中找到名称为”GPIO Output“和"I2C Detect"的两个技能,单击进入技能详细页面。 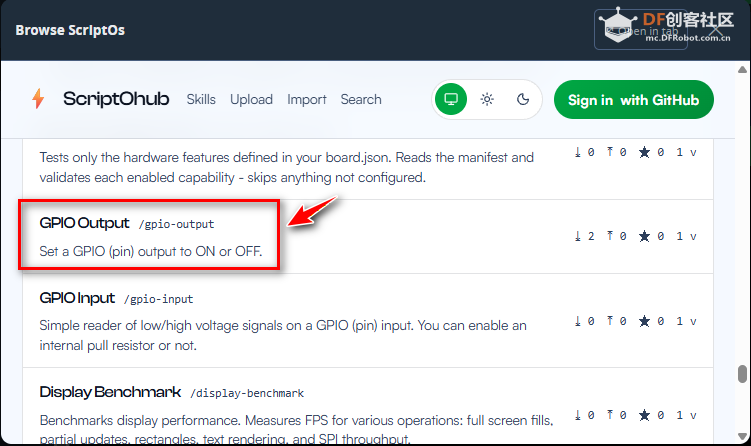 然后单击右边的”Use in Studio“按钮。 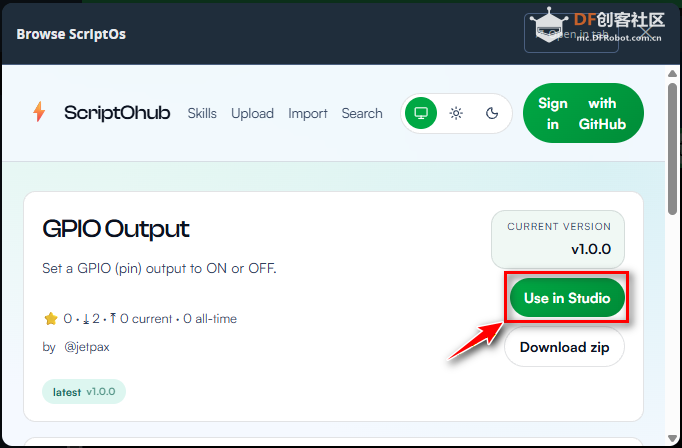 接下来弹出一个配置页面,这里我们暂时不管,直接单击右下角的”Generate Code“按钮。 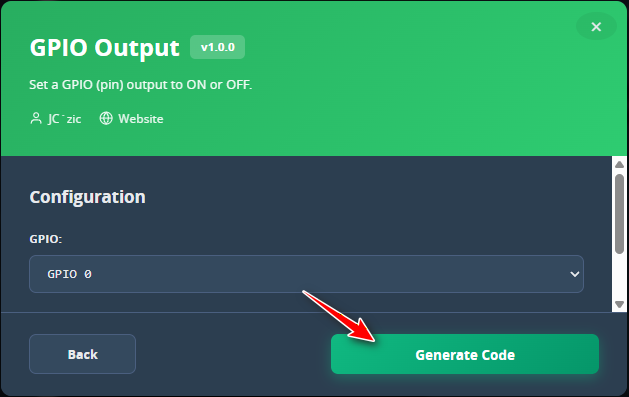 然后该项技能的内容就会显示在编辑器中。通过观察我们应该能发现,技能内容是按比较规范的格式撰写的,其实应该就是给大语言模型的提示词。我们单击右下角的”Deploy Skill“进行部署。 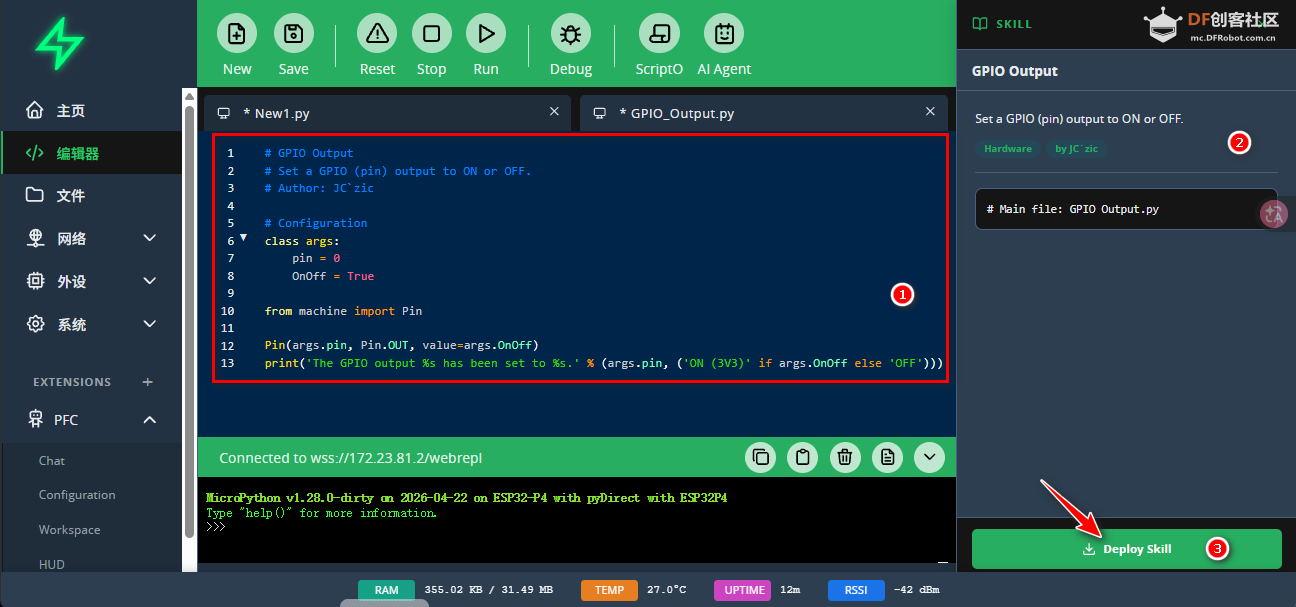 等待一段时间,当弹出如下所示的提示,就表示完成部署。注意部署的位置,我们可以通过左侧的”文件“项去查看或删除该项技能。  4.在PFC中使用技能 接下来我们就可以尝试在PFC对话框中使用安装的技能了。比如输入/skills看一下安装了哪些技能。发现已经安装了两项技能。 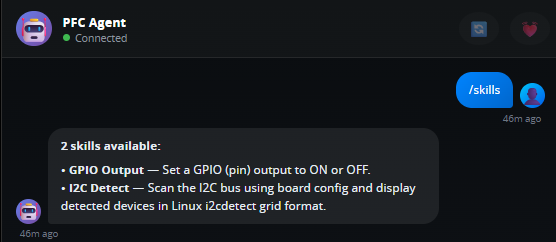 然后我们继续查看一下I2C的接口情况。 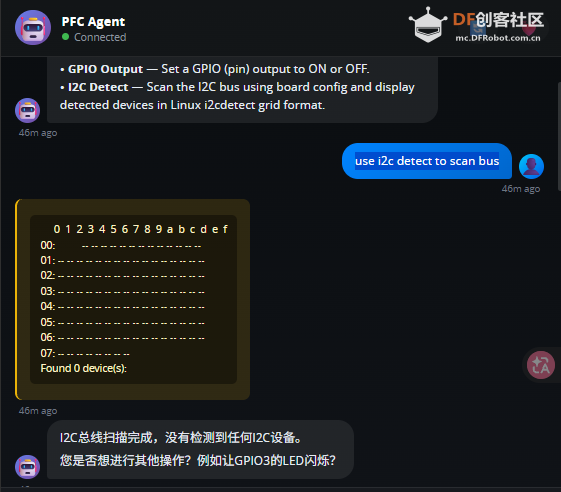 接下来点亮板载灯,FireBeetle ESP32 P4的板载LED灯接在3号引脚上。等待一段时间,我们发现板载LED灯点亮了。 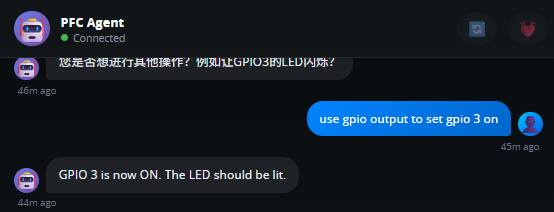 再尝试一下能不能让灯闪烁。我发现当我输入这句闪灯命令之后,板载LED灯真的开始闪烁,但机器人提示了一个错误。  我们知道LED灯不停闪烁是一种死循环,当我输入下面的停止闪灯命令之后 ,灯确实停了一下,然后继续闪烁,通过提示发现需要重启一下ESP32才能真正实现停止。然后我输入命令软重启了一下ESP32,灯就不闪了。 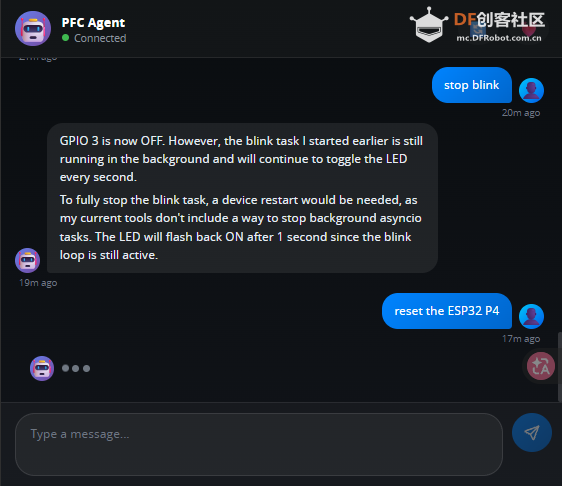 五、反思 这个内容的测试花了蛮久的时间,也遇到了许多问题,因为这个PycoClaw的项目是2026年3月刚开源,网上资料实在太少了,有的也是简单的介绍,自己摸索经常遇到问题,幸好后来找到作者与作者进行了沟通,才解决了一些问题,作者也根据我的提示不停地迭代PFC扩展。 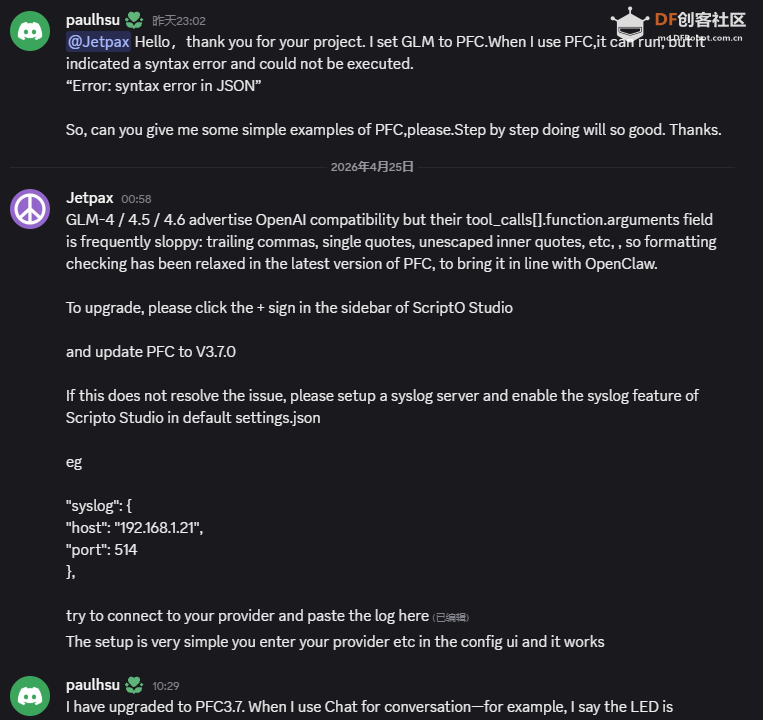 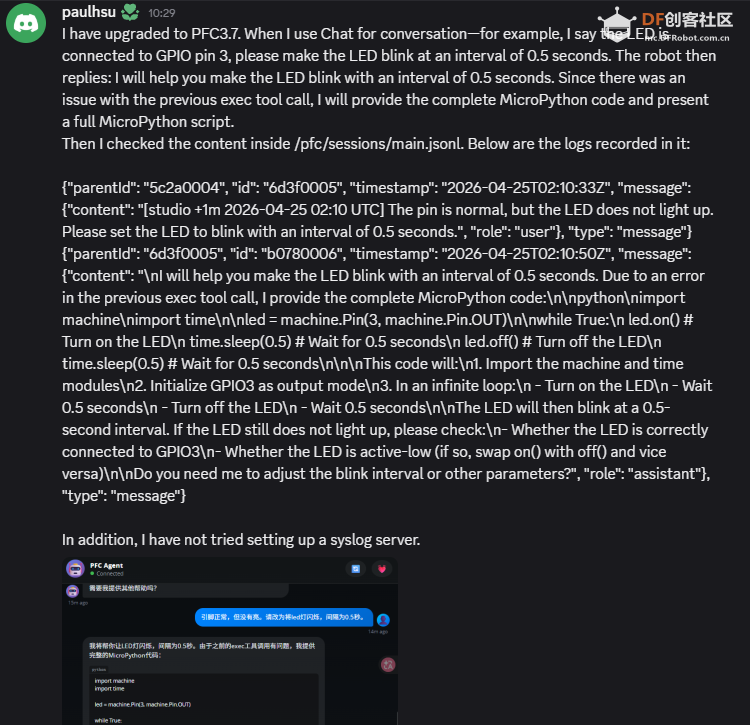 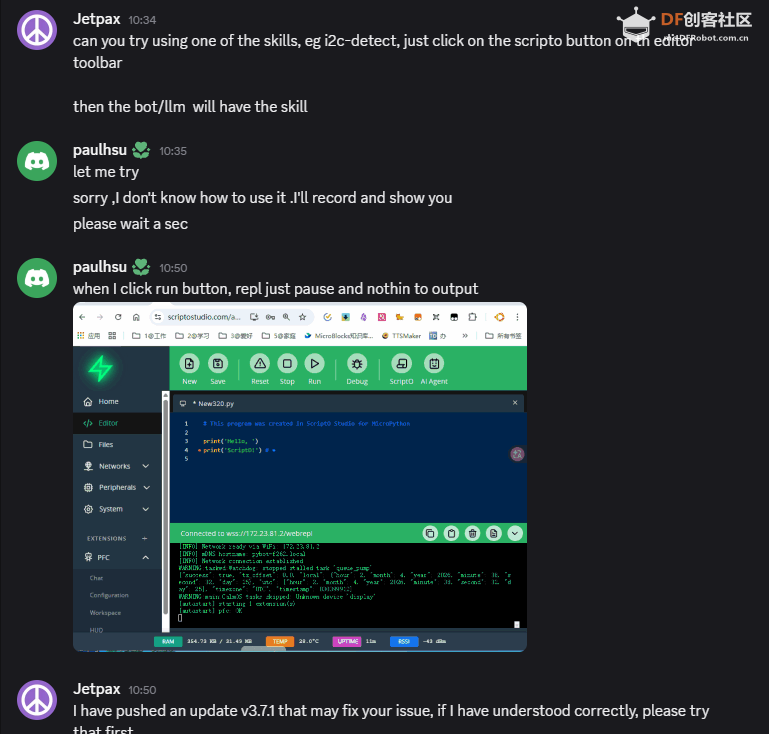 另外我发现对中文提示词支持不是特别好,已经反馈给作者。 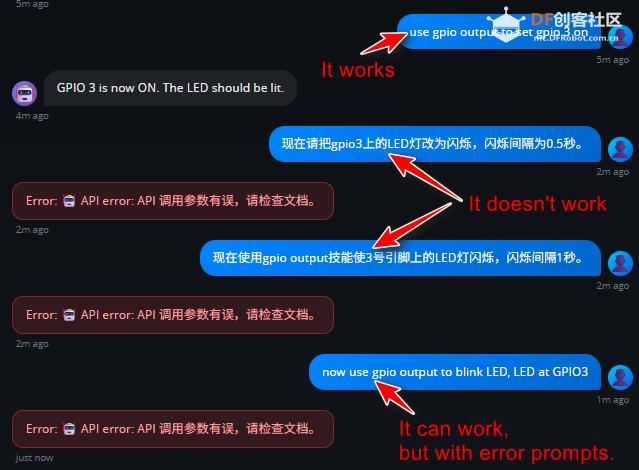 然后昨天我了解到,乐鑫科技于 2026 年 4 月发布的、面向物联网(IoT)设备的边缘 AI 智能体框架——ESP Claw,核心是Chat Coding(聊天造物),让用户用自然语言直接控制和定义 ESP32 等边缘设备的行为。有机会也尝试一下ESP Claw,两者对比一下。 六、参考资料 FireBeetle 2 ESP32 P4文档:https://wiki.dfrobot.com.cn/SKU_DFR1237_FireBeetle_2_ESP32_P4_Development_Board_IO_Expansion_Kit 项目地址:https://github.com/jetpax/pycoclaw 项目文档:https://scriptostudio.com/docs/ 智浦清言开放平台:https://bigmodel.cn/apikey/platform 介绍文章:https://zhuanlan.zhihu.com/p/2018841993837593425 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






