|
1198| 1
|
[ESP8266/ESP32] ESP32 P4跑ESP CLAW及与PycoClaw的比较 |

|
本帖最后由 仔爸 于 2026-5-5 21:23 编辑 前些天在DFROBOT的Esp32 P4上测试了PycoClaw,虽然历经磨难,还在作者的帮助下,总算较好地跑起来,测试效果还可以。这不,听到乐鑫刚出ESP CLAW,我就趁热打铁,也测试一下。测试下来总的感觉是,ESP CLAW跑起来简单,毕竟本土化的东西,与微信、飞书、QQ等交互相对简单,不过另一方面,可玩性不如PycoClaw。 话不多说,先完成ESP CLAW的测试。 一、安装ESP CLAW ESP CLAW也是采用在线烧录的方式,目录支持ESP32 S3和ESP32 P4两种型号的主控板。 第一步:进入https://esp-claw.com/zh-cn/ 然后单击“在线烧录”。  第二步:配置烧录信息。 在烧录前,需要先连接主控板(如果无法找到连接的COM口,则需要安装驱动,如cp210x等)。然后选择开发板,最后单击烧录按钮。 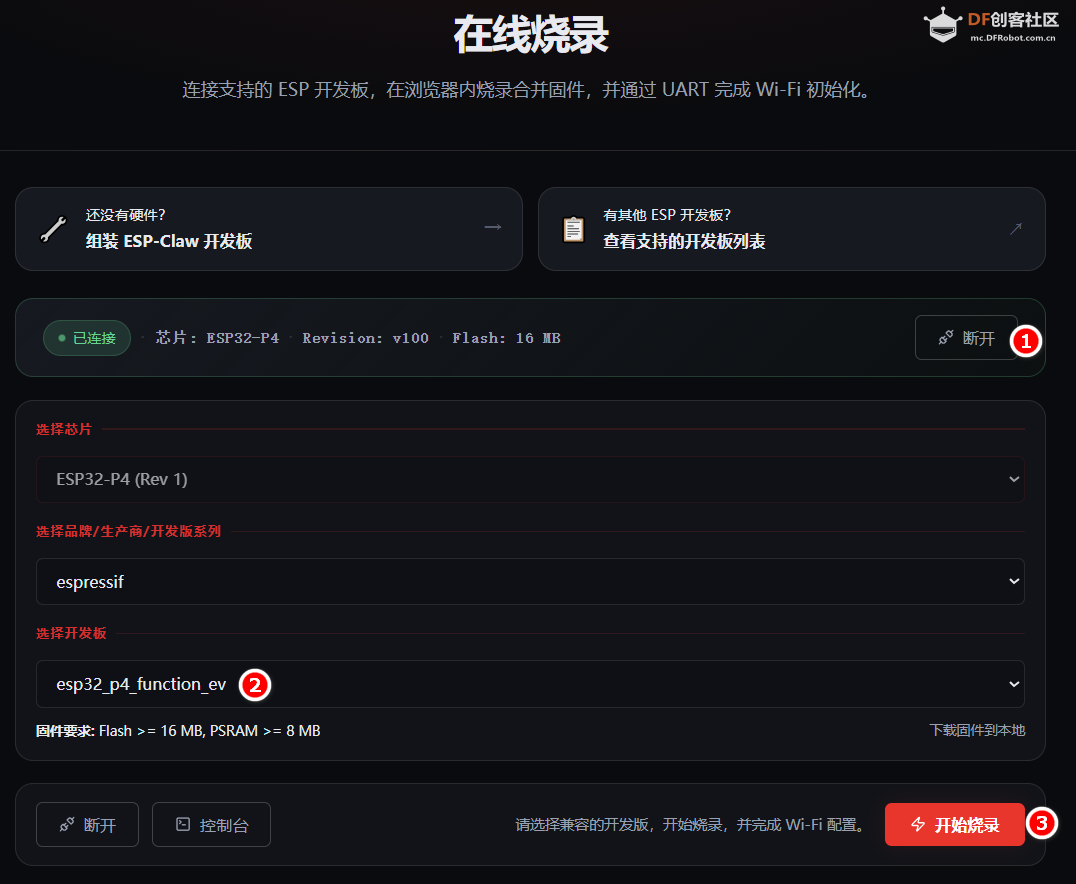 第三步:开始烧录  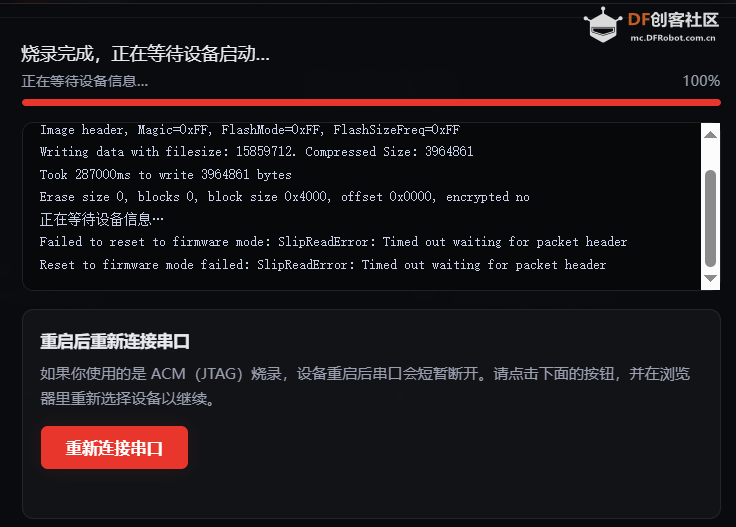 第四步:配置WIFI 保证esp32 p4与烧录的电脑在同一网段。   第五步:配置LLM大语言模型的API 这里我选择使用阿里云百炼大模型,选择了qwen3.6-plus,你也可以根据自己的需求去选择其他的大模型,并填入其API。 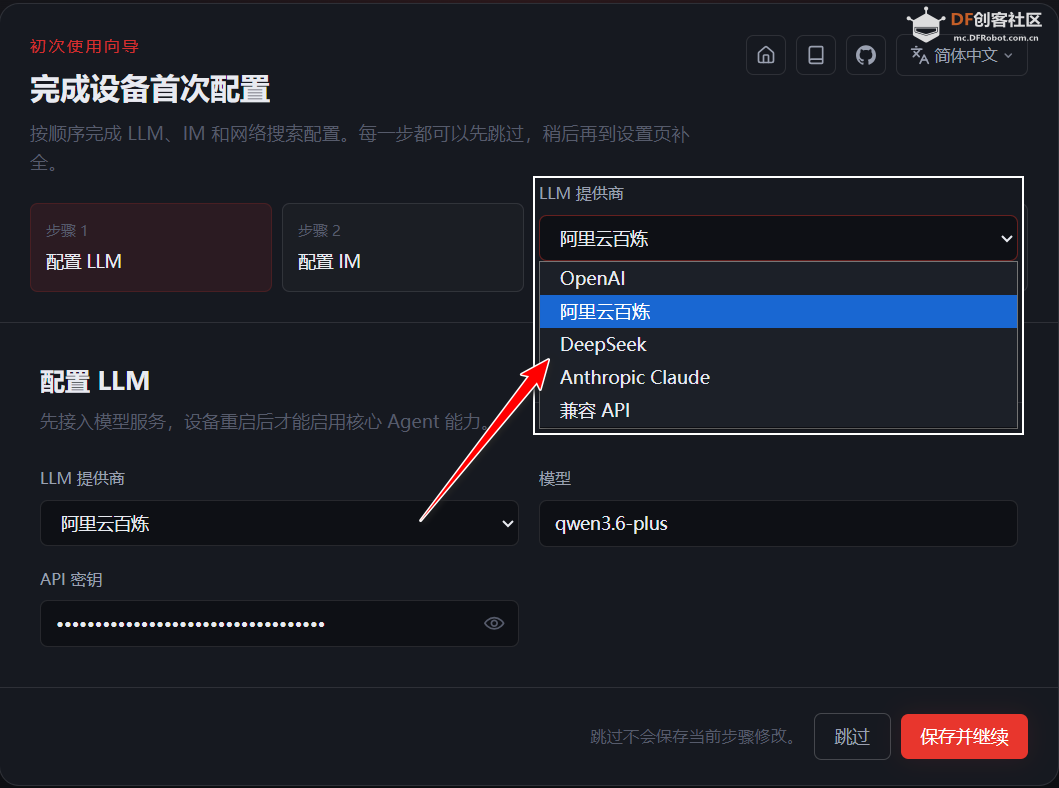 第六步:配置IM即时通讯接口。 在这里我们单击并配置微信聊天,单击右侧的“生成二维码”,用手机微信扫码绑定微信聊天机器人,自动生成下面的高级设置中的各项内容。如果你还想配置“飞书”“QQ”等,可以继续添加。  绑定成功后,你可以在微信中看到名为“微信ClawBot”的机器人。 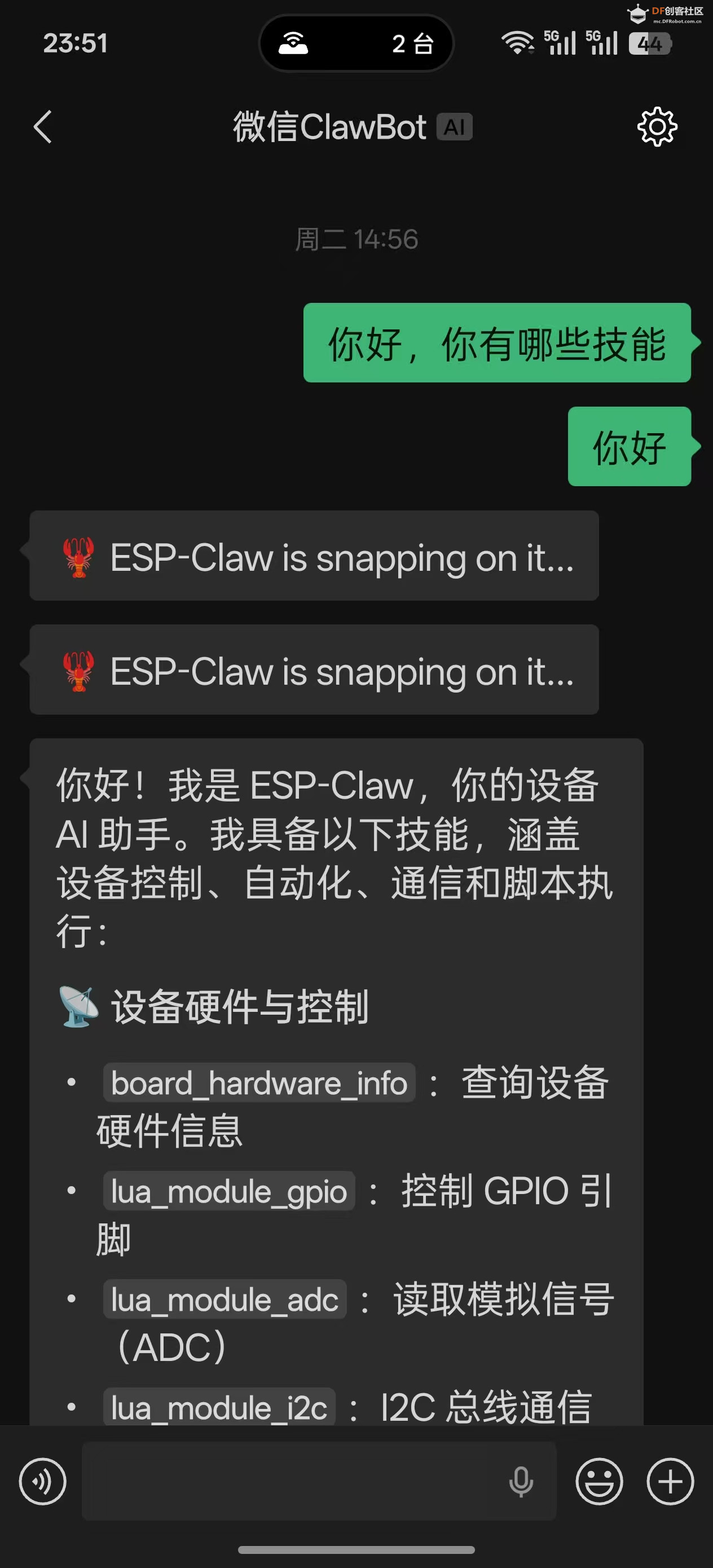 第七步:配置网络搜索 配置搜索引擎后,ESP-Claw才能通过网络检索获取最新信息,如查询天气等需要依赖搜索引擎支持。  在tavily官网注册并登录。 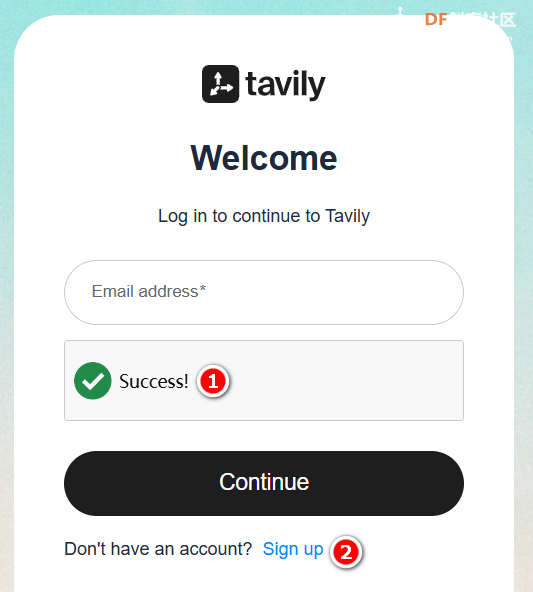 登录后,在Overview的右侧页面复制API Keys。 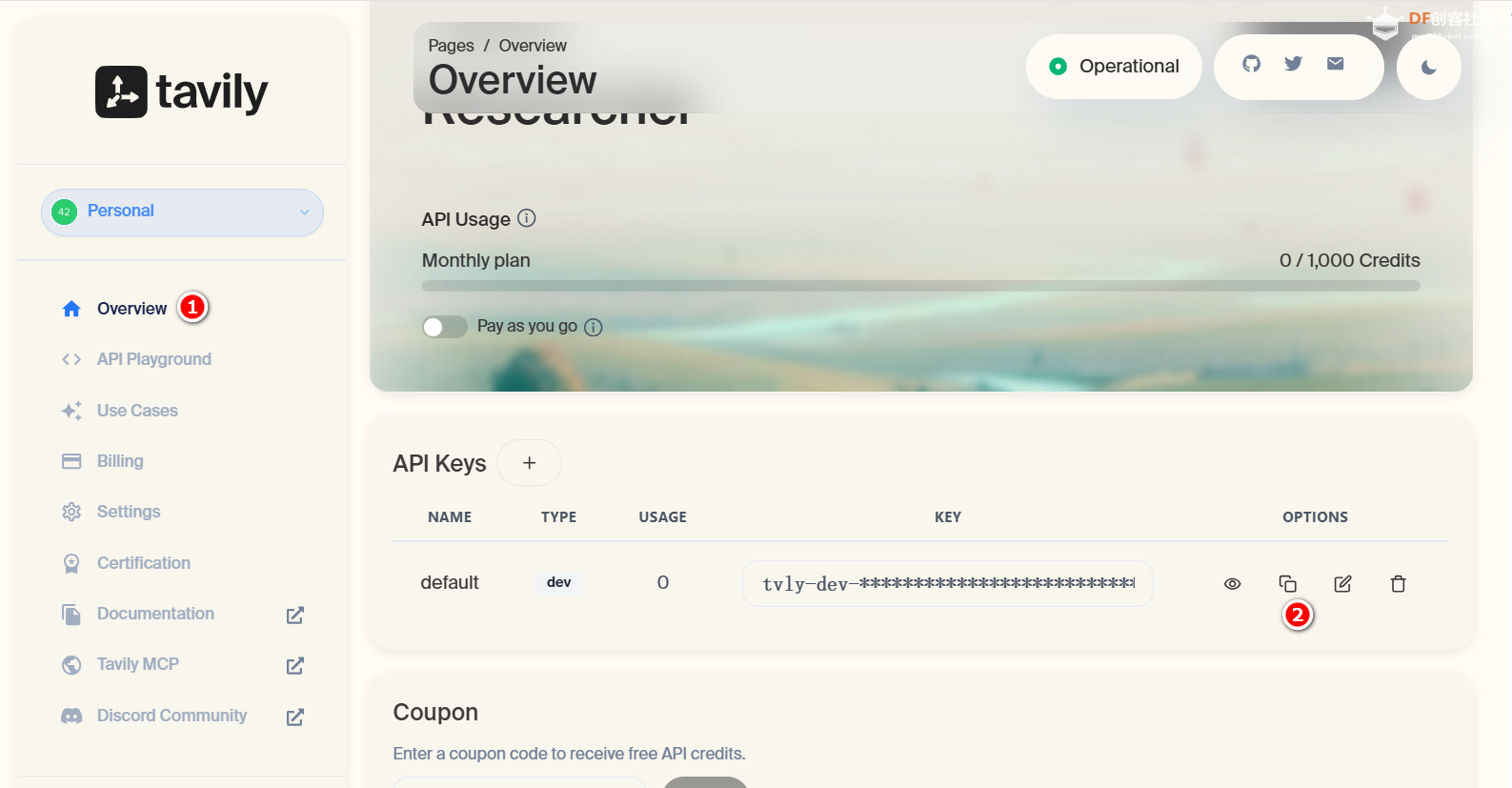 第八步:重启设备。 单击重启按钮重启ESP32 P4,完成重启后,浏览器界面自动进入如下所示的管理界面。 可以单击
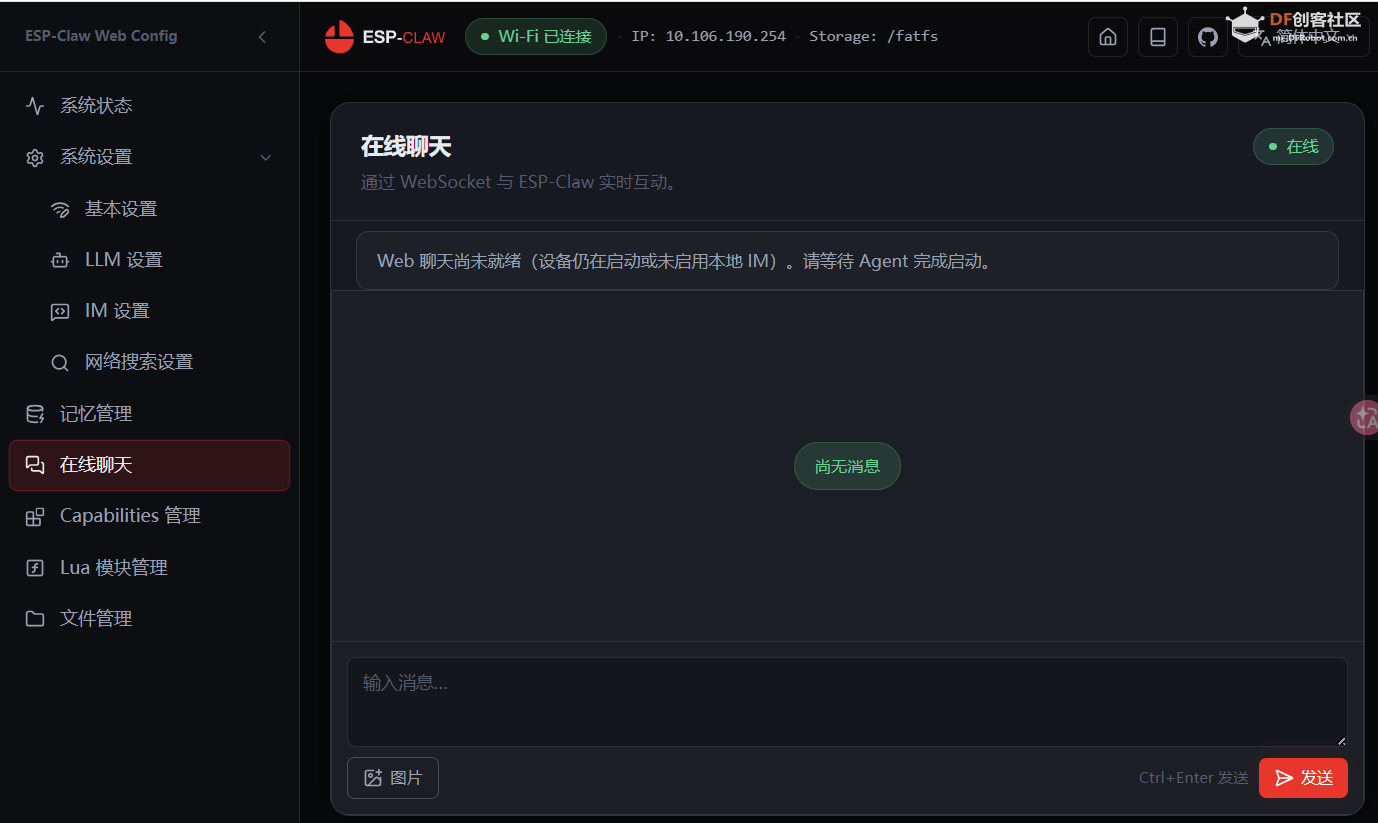 二、测试ESP CLAW 1.通过“在线聊天”来命令EPS32 P4工作在浏览器管理端,我们可以通过在线聊天的方式让硬件工作。在聊天框输入想让ESP32 P4执行的内容,稍等片刻就会看到执行效果。这里的内容不消耗之前配置的阿里云百炼大模型的Token。估计是使用了乐鑫共享的资源。 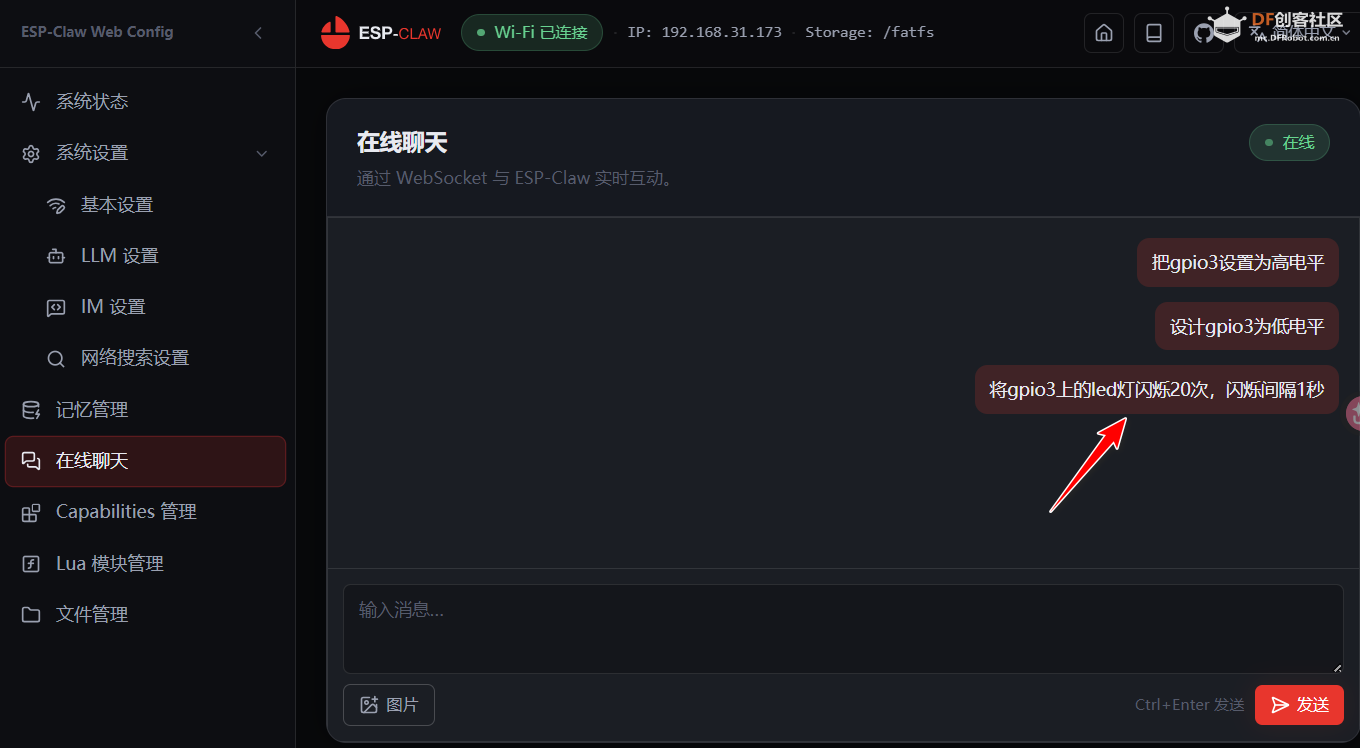 2.通过微信ClawBot机器人让ESP32 P4工作 在微信中找到“微信ClawBot”机器人聊天窗口,输入提示词,如“你有哪些技能”,则会收到相关的信息。  FireBeetle 2 ESP32-P4的板载LED灯在3号引脚,我们测试一下。输入“设置3号引脚为高电平”,然后机器人与ESP CLAW沟通后,成功把板载LED灯点亮。 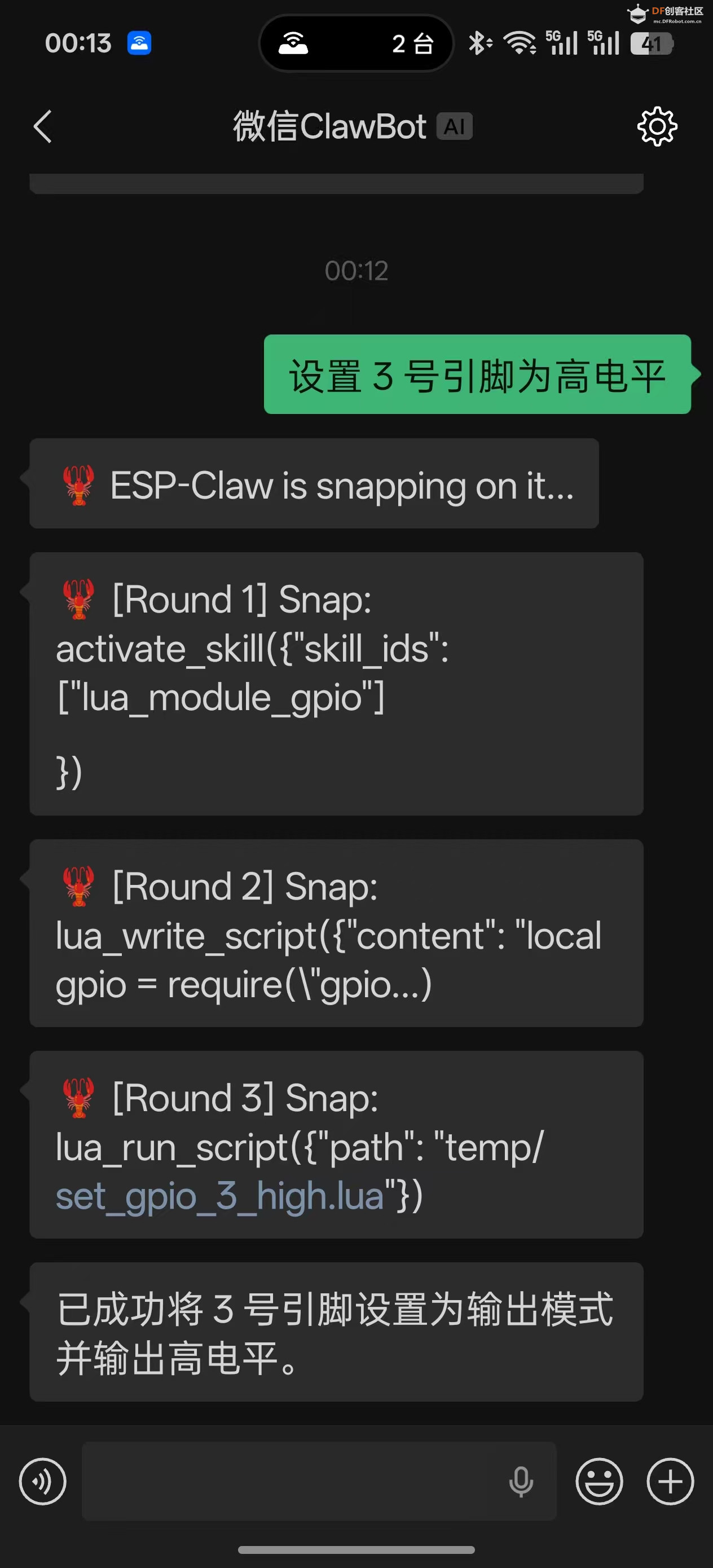 换个话述,我想把板载灯关闭,我输入“关闭gpio3上的led”,等待几秒就把灯给关了。 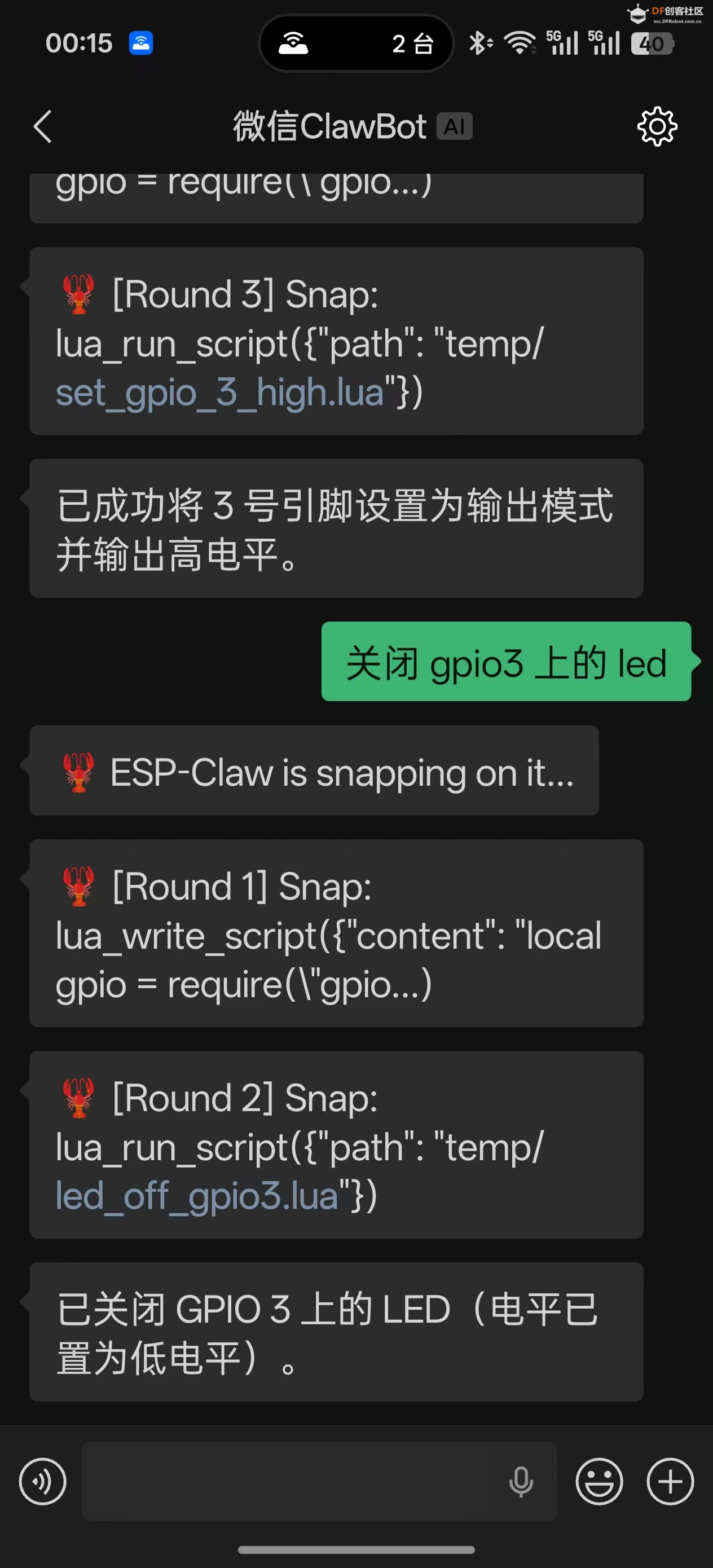 通过“文件管理”,我们发现刚才两个对话会产生两个程序文件,使用的是Lua语言,存放在ESP32 P4的/scripts/temp目录中,双击文件可以查看内容,也可以下载或删除(右侧按钮)。  3.使用ESP-CLAW的能力:技能和模块 通过查看ESP32 P4上的文件目录,发现在/skills目录下有一些技能和模块,比如有一个weather.md的文件 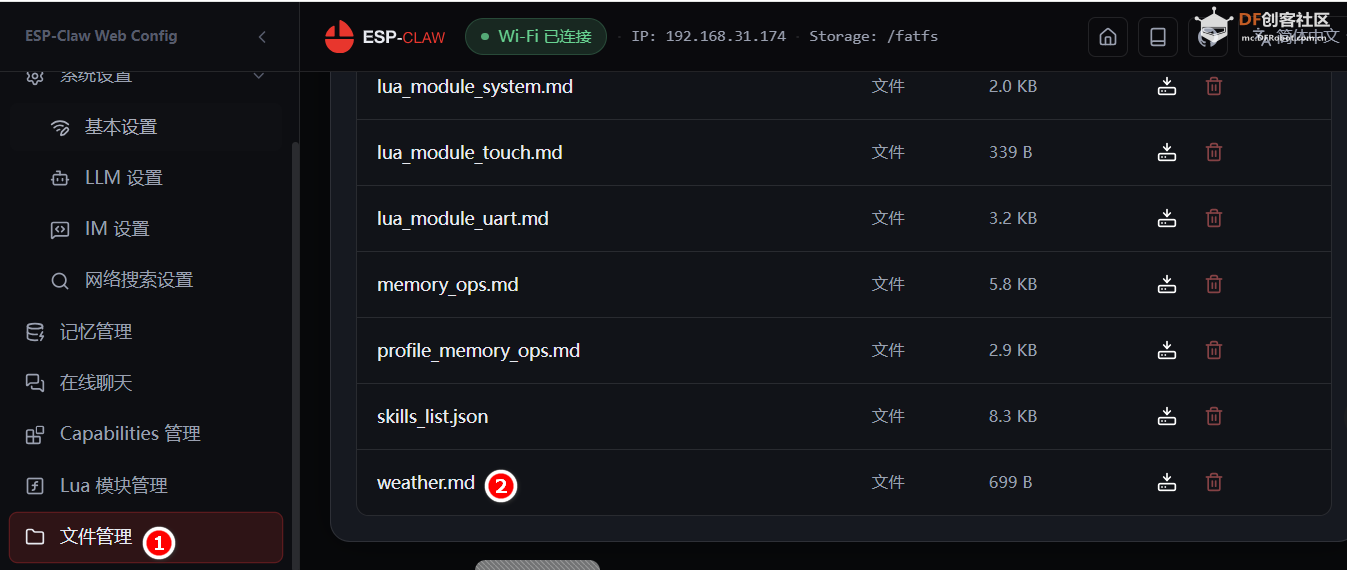 双击weather.md文件,可以看到如何获取天气的使用方法 。 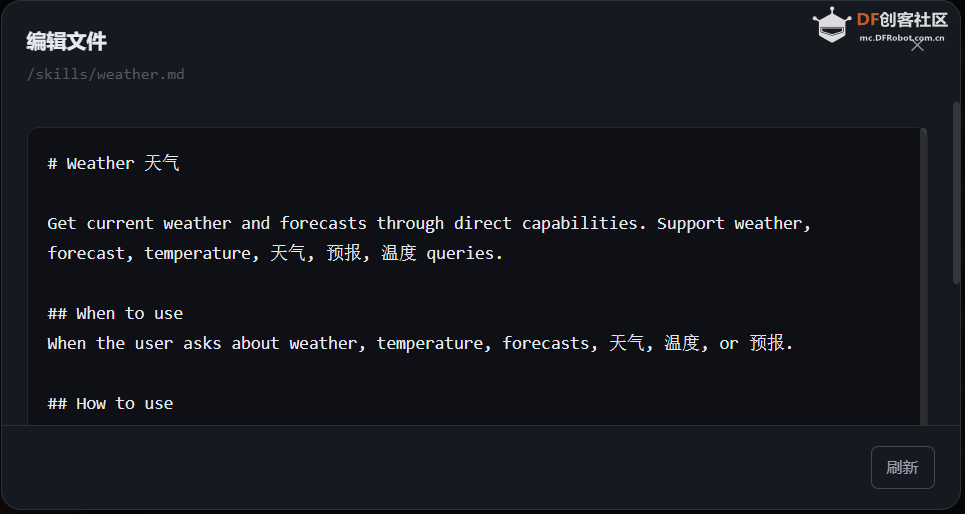 接下来我在ESP32 P4的GPIO4(接CLK)和GPIO5(接DIO)引脚上接了一个四位数据管,然后将宁波当前的温度显示在上面。  接下来我又尝试在ESP32 P4上接了一个TFT_LCD屏,驱动类型是ILI9341,结果发现无法驱动。查阅了ESP-CLAW的GITHUB,发现目录我刷的这个固件只支持EK79007和GT911这两类高分辨率的屏幕。倒是发现m5stack_cores3支持ILI9341显示屏,但我不会重新编译ESP32 P4的固件,否则可以把这个液晶屏的驱动加到固件里。 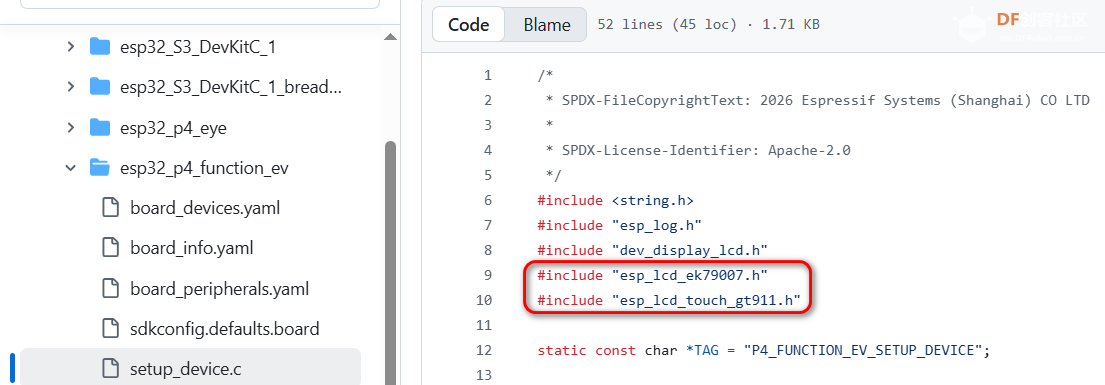 三、ESP-CLAW和PycoClaw的比较 1. 相同点
附:添加飞书聊天机器人 之前使用的是微信聊天机器人,使用直接很方便,只要用手机上的微信扫码就添加成功。而飞书机器人相对复杂一点。 第一步:飞书要以组织注册,如果是个人的话,估计不能使用。切记切记。 第二步:登录飞书开发者平台,网址https://open.feishu.cn/,在开发者后台首先需要创建一个“企业自建应用”。  第三步:输入名称,单击“立即创建”按钮。  第四步:创建成功后,可以通过左侧“基础信息”中的“凭证与基础信息”中获取API。可以将App ID和App Secret复制一下(可以暂存在记事本等文本软件中),或者进入ESP CLAW管理后台的系统设置>IM 设置,添加一个飞机机器人,将这个凭证填入。 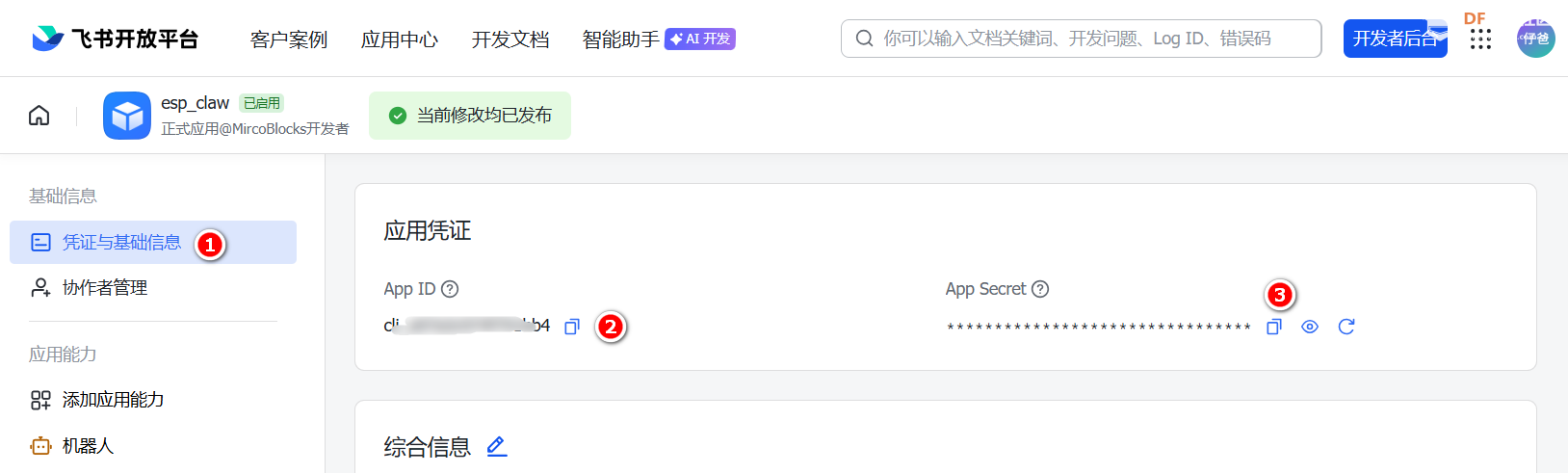 第五步:添加机器人能力。 单击左侧“应用能力”下的“添加应用能力”,在右侧找到并添加“机器人”。  第六步:单击左侧“应用能力”下面的“机器人”(上一步添加了之后会出现这个链接)。 找到右侧”如何开始使用“右侧的笔图标,在下面出现的输入框中输入机器人的卡片名称。  第七步:单击左侧”开发配置“下面的”事件与回测”,单击右侧“订阅方式”右侧的笔图标,选中“长连接”前面的单选框,然后验证一下是否成功,如果成功则单击“保存”按钮。   第八步:订阅“接收消息”。 仍在当前页面中找到右侧下方的“添加事件”按钮,在弹出的对话框中单击左侧的“消息与群组”,在右侧找到“接收消息”将前面的复选框勾选。  第九步:开通“群消息”权限。 单击左侧“开发配置”下面的“权限管理”,然后可以单击右侧的“开通权限”,在弹出的对话框中单击左侧的“消息与群组”,然后在右侧勾选群消息相关的复选框。  如果你觉得这样去挑选一个一个的权限麻烦,也可以单击“批量导入/导出权限”,  在弹出的对话框中输入下面这段Json代码,这里一共开通了4个权限(im开头)。然后按提示下一步进行确认添加即可。 第十步:发布机器人智能体。 单击左侧“应用发布”下面的“版本管理与发布”,在右侧单击“创建版本”按钮。  然后在右侧输入一些版本相关的信息,最后单击“保存”按钮。然后需要等待飞书官方审核通过才可以继续下一步。 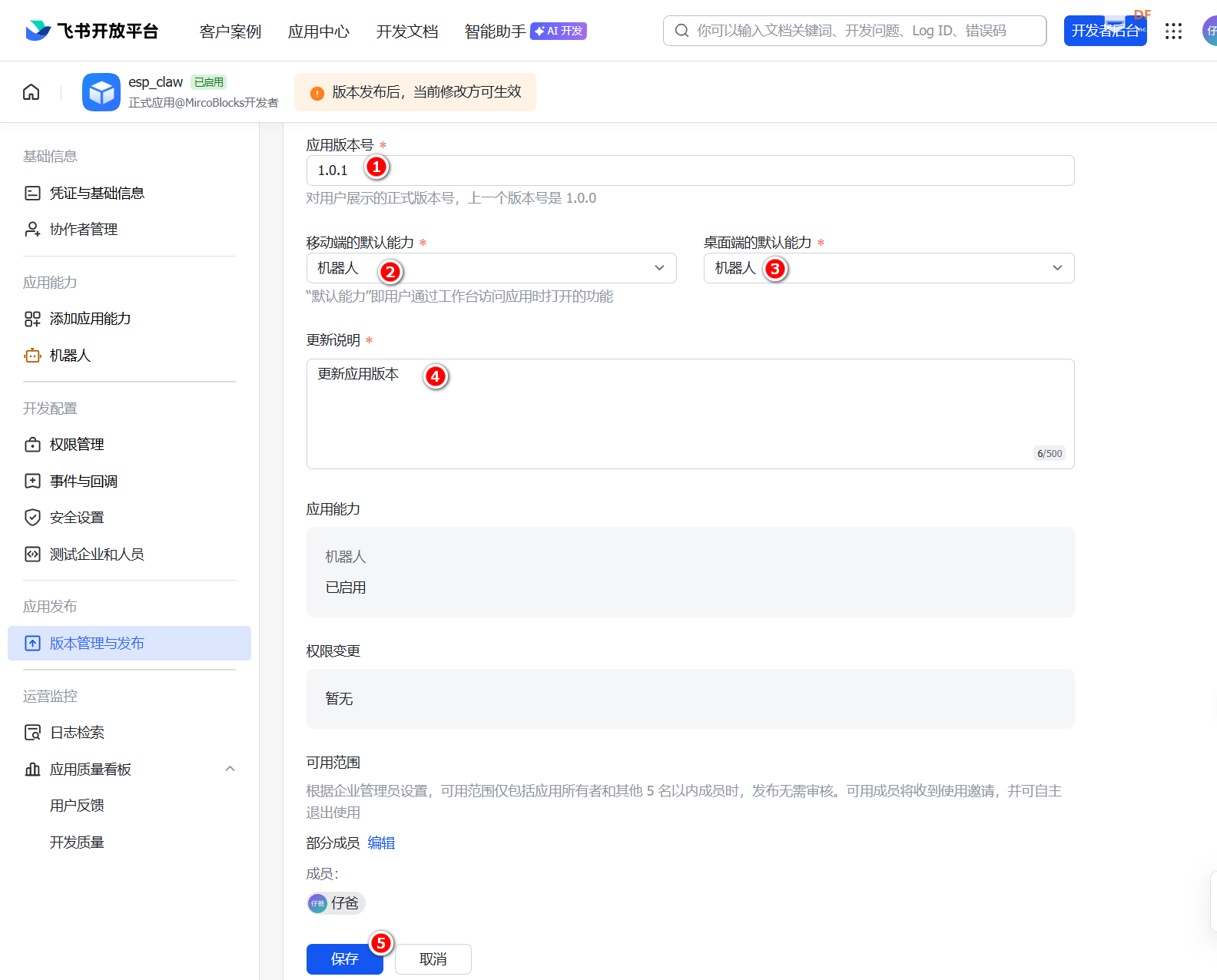 第十一步:在手机或PC端的飞书客户端的搜索框中输入第三步创建的智能体名字,然后打开与此智能体的对话框就可以进行交流沟通了。 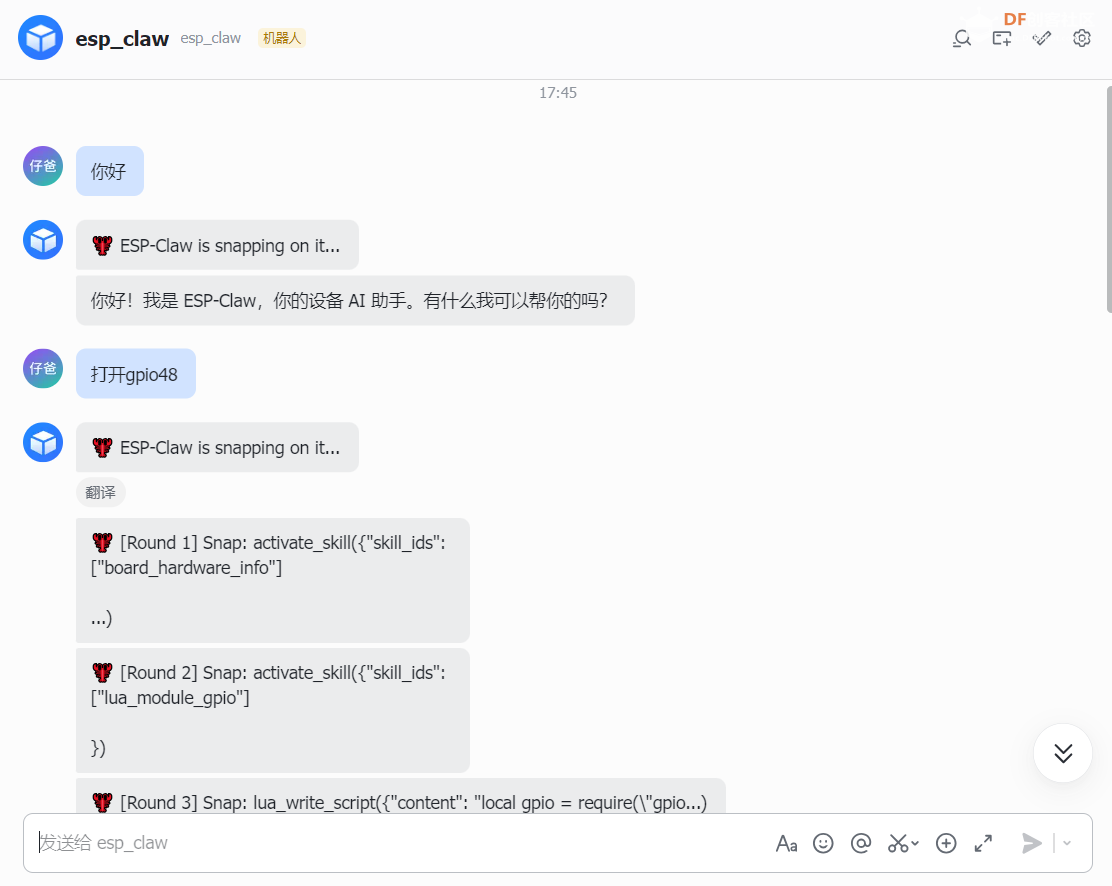 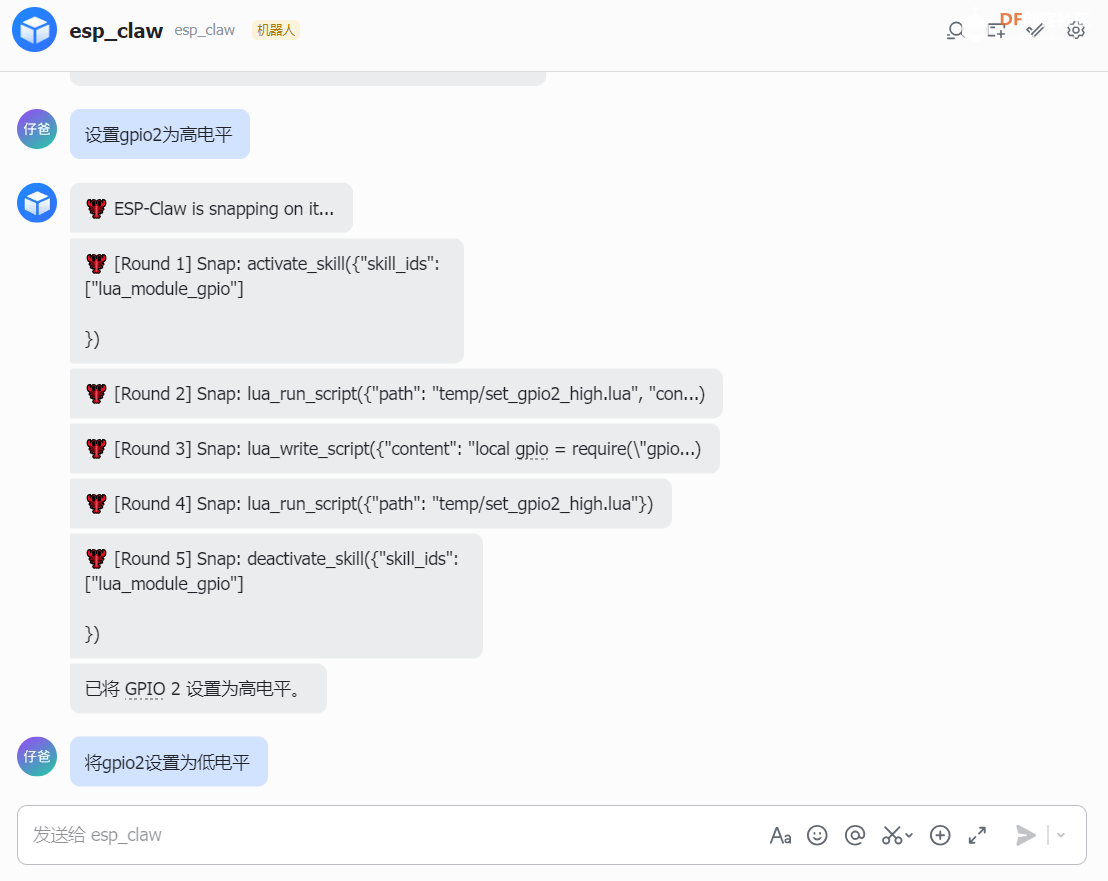 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 仔爸真棒,开始学习......
仔爸真棒,开始学习......






