|
5534| 20
|
[K10项目分享] 行空板K10适配ESP CLAW —从被动响应到主动智能 |

|
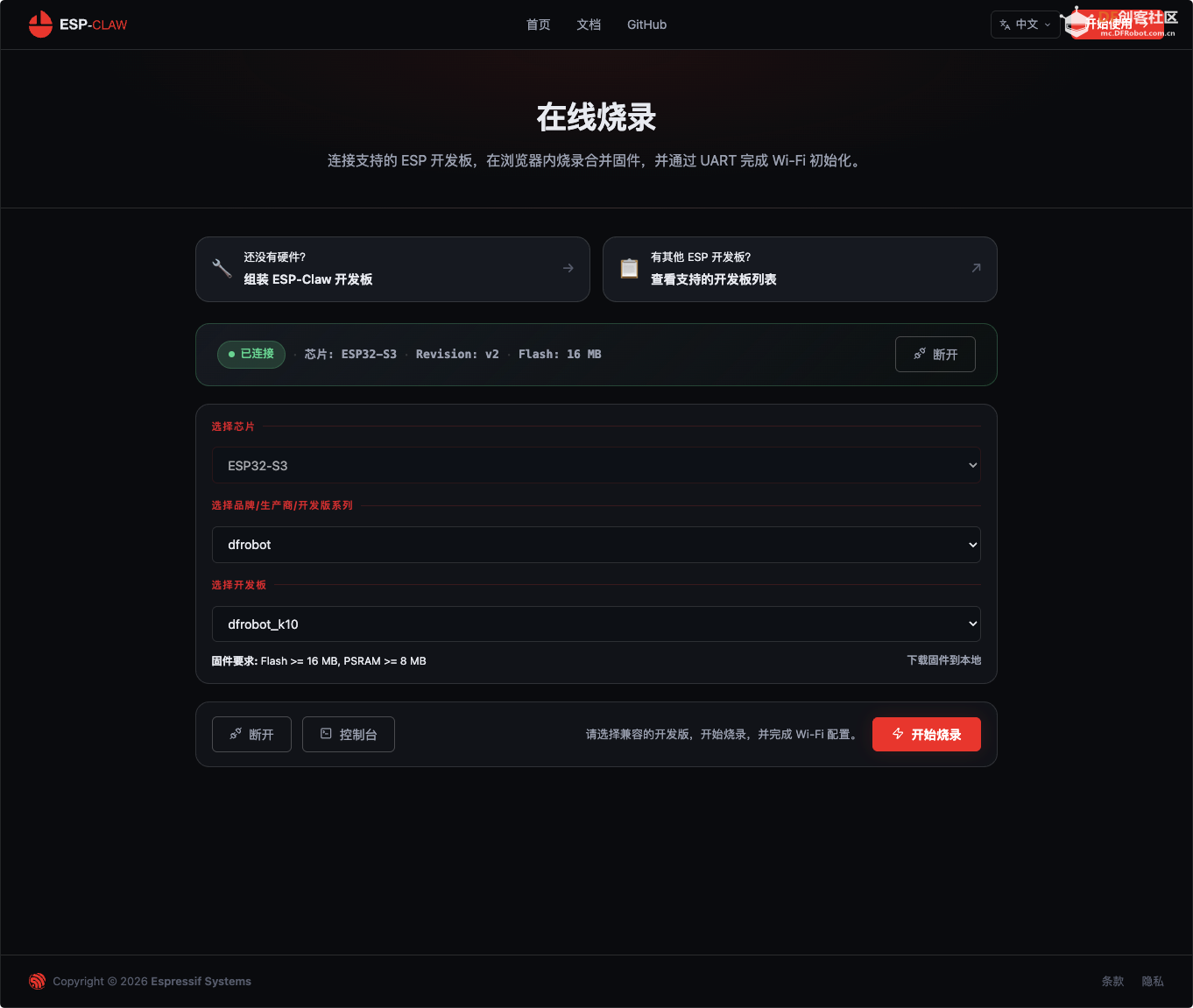
本帖最后由 YeezB 于 2026-4-30 10:06 编辑 从“被动响应”到“主动智能”:ESP-Claw 如何让每一块硬件都长出自己的“大脑”  长久以来,我们使用的智能设备大多扮演的是“听令者”的角色——指令来了,它照做;没有指令,它便静默。你让它关灯,它就关灯;你让它记录温湿度,它就乖乖记录。这种“你说我做”的单向模式,构成了人们对物联网的基本认知。 但ESP-Claw AI智能体框架给出了一个不一样的答案:。它以“Chat Coding(聊天造物)”为核心,打破了传统设备必须云端依赖、无法自主思考的瓶颈,将 AI 智能体的“思考力”下沉到了边缘芯片。这意味着,搭载 ESP-Claw 的设备不再是被动接收指令的执行单元,而是一个能在本地实现感知、推理与决策闭环的独立智能体。 然而,再优秀的大脑也需要一具“健壮的身体”作为载体。在DFRobot推出的行空板K10(UNIHIKER K10) 身上,我们看到了一套理想的价值终端。这款以 ESP32-S3 为主控的高集成 AIoT 开发板,可谓是“麻雀虽小,五脏俱全”:2.8寸彩色屏幕、200万像素摄像头、双麦克风、扬声器,以及温湿度、环境光与三轴加速度传感器等一应俱全。如此丰富的板载传感与交互资源,与 ESP-Claw 强调的“本地实时感知”与“多模态交互”形成了天然的技术互补。 当“顶级的框架”遇上“顶级的硬件”,会擦出怎样的火花?如今,我们率先在行空板K10上完成了对 ESP-Claw 智能体框架的全面软件适配。曾经需要在 PC 或服务器上才能运行的复杂 Agent,已经完美融入这块小巧的开发板之中,真正开启了“嵌入式原生”的 AI 智能体轻量化时代。现在,我们就来深入拆解这一结合背后的技术尝试与实战魅力。 软硬件准备 硬件:行空板K10 固件:从文末下载.zip压缩包后解压获得.bin文件 烧录网站:https://espressif.github.io/esp-launchpad/? 烧录 注:行空板K10固件截至26年4月29日已成功合并入ESP CLAW主线。 您可跳过以下烧录,配置步骤,直接在ESP CLAW官方网站进行烧录,配置后台模型 ESP CLAW官方网站: https://esp-claw.com/zh-cn/flash/ 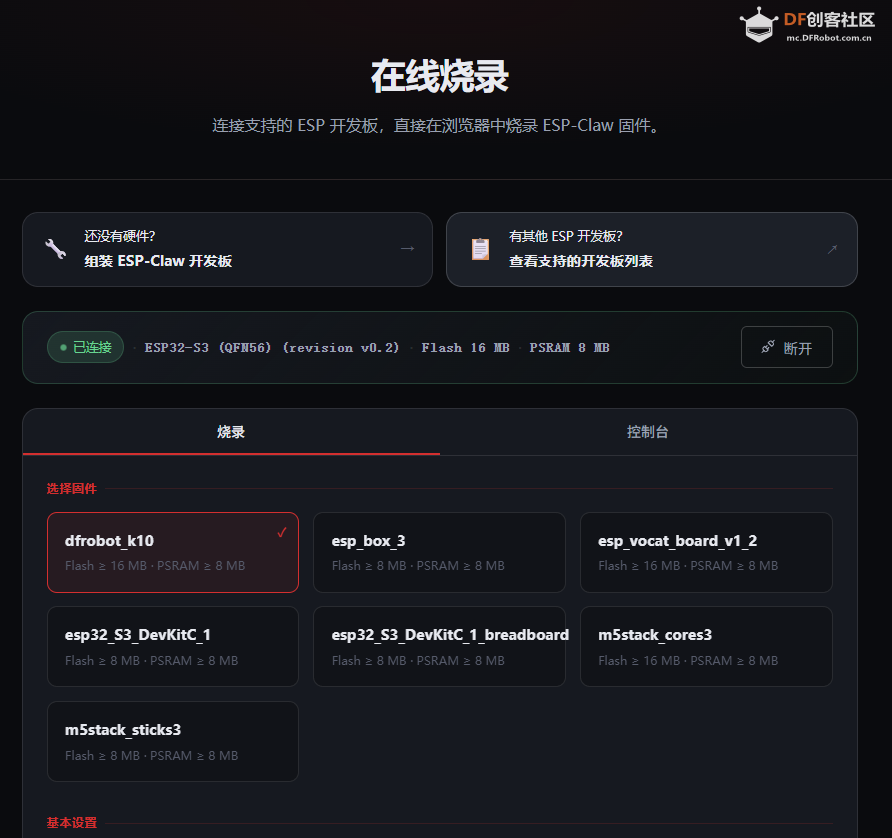 在DIY中选择刚刚下载的.bin文件 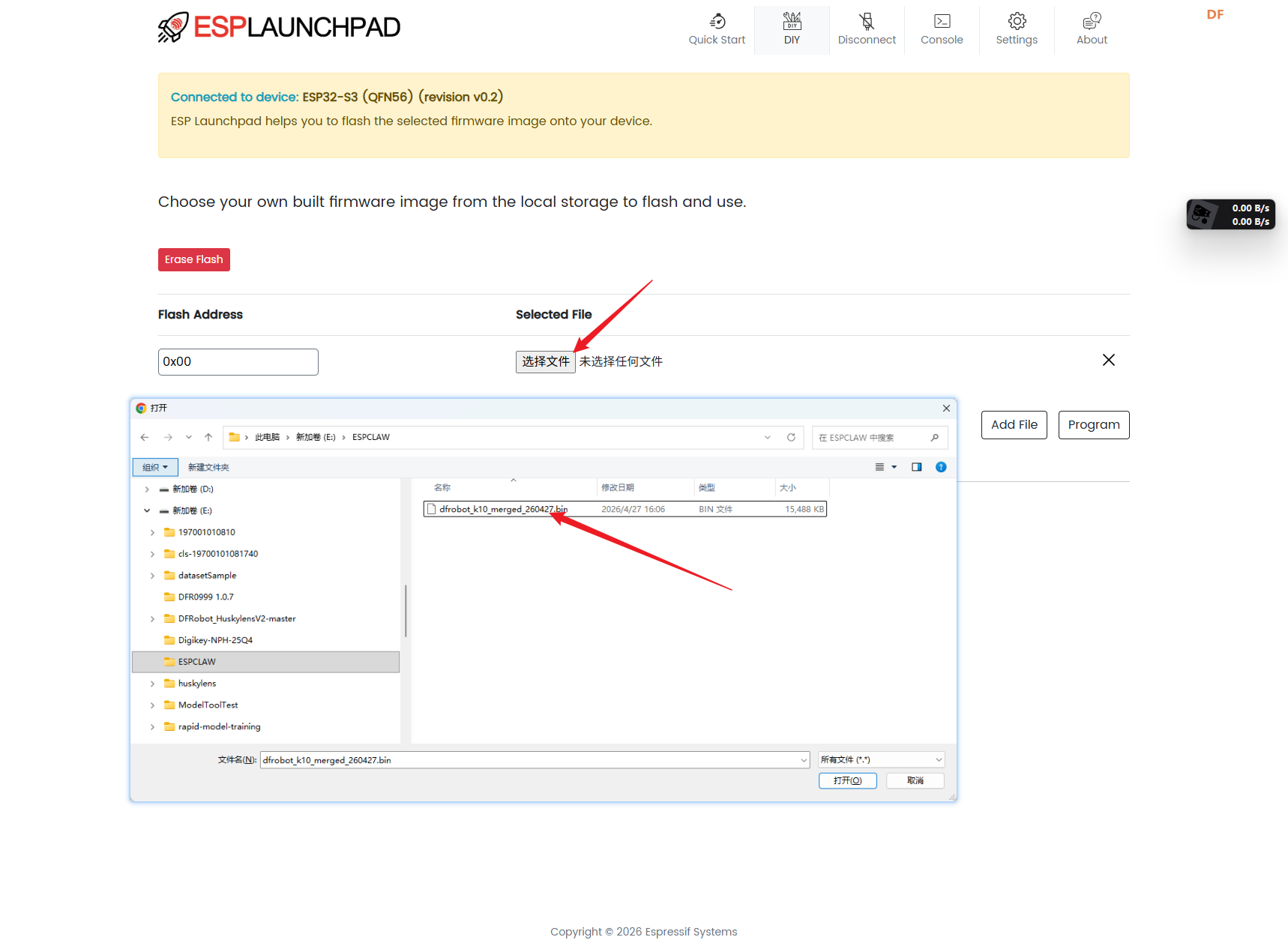 Flash Address设置为0x00 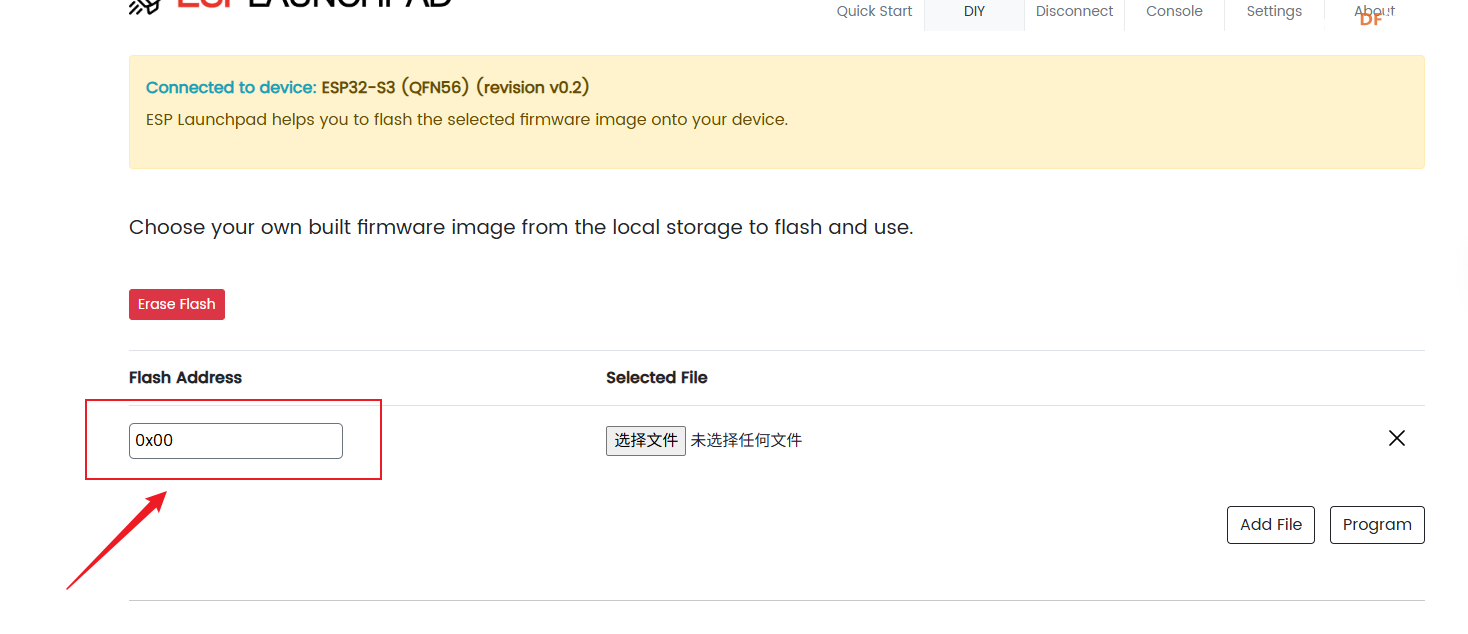 按住K10背后的BOOT按钮,将其通过USB接入电脑。然后点击Connect连接电脑与K10 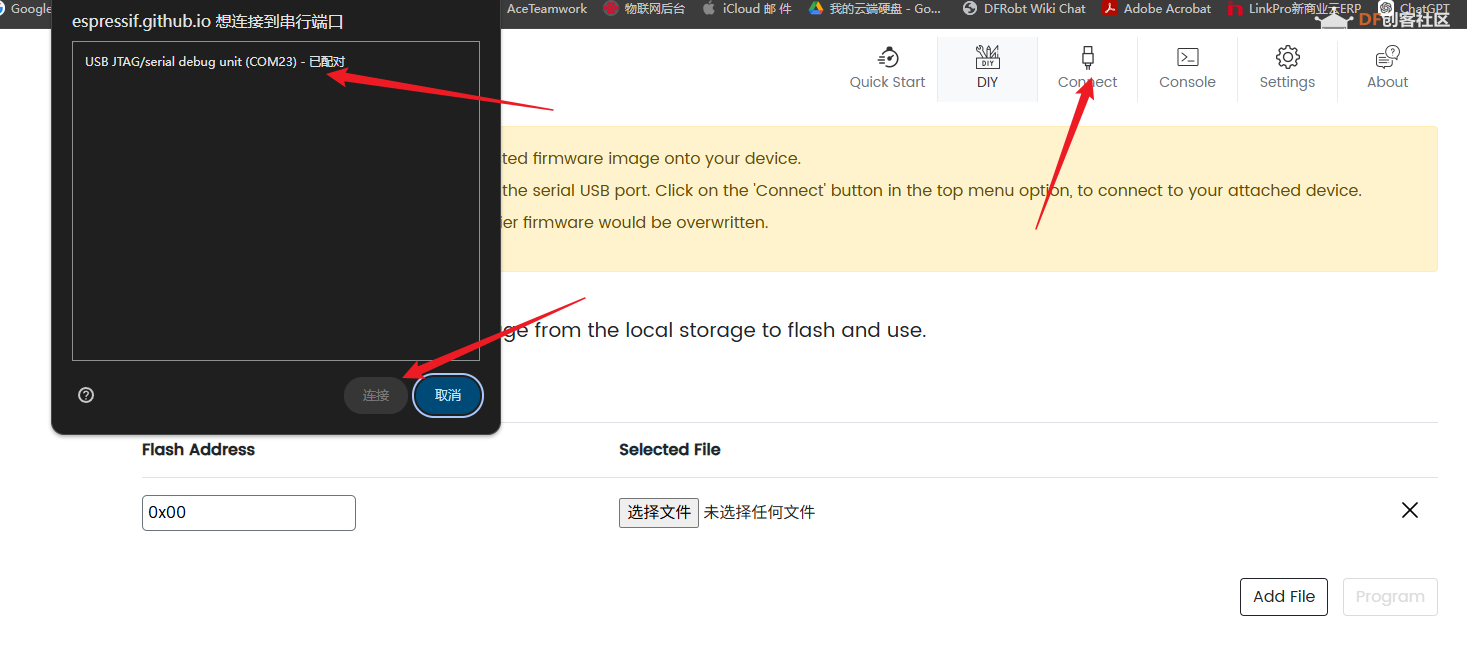 点击Erase Flash擦除现有固件 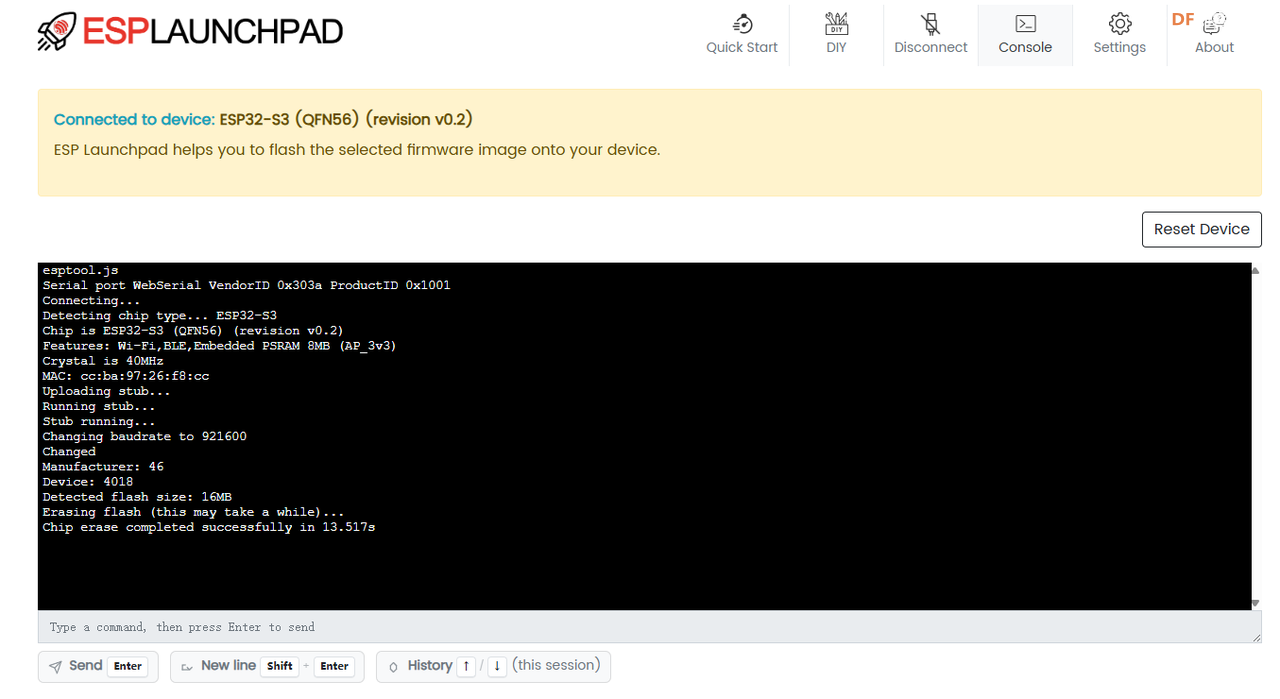 最后点击Program来烧录ESP CLAW固件 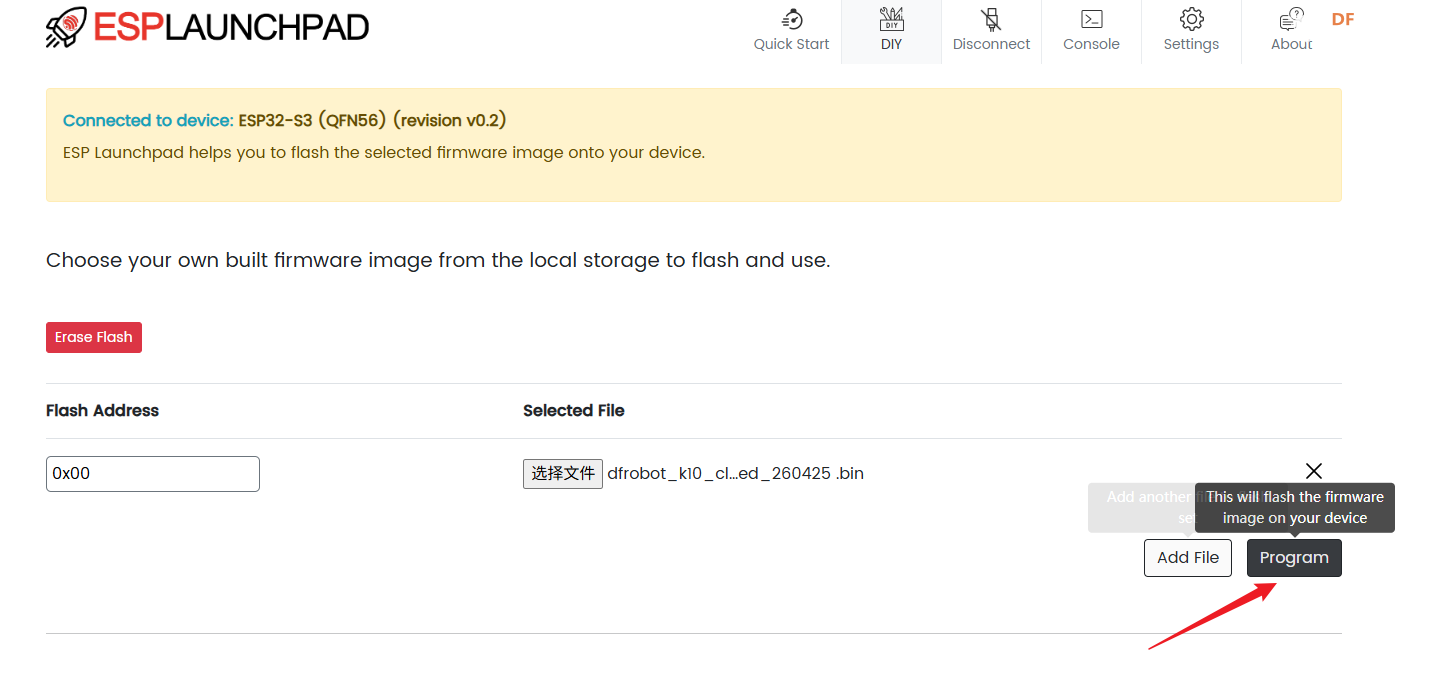 配置ESPCLAW 烧录完成后,行空板K10显示屏上会出现ESP CLAW图片,并且顶部会出现WiFi名称。 使用手机或者电脑连接该WiFi,等待数秒后会自动打开配置网页。或者手动打开 http://esp-claw.local/ 也可。 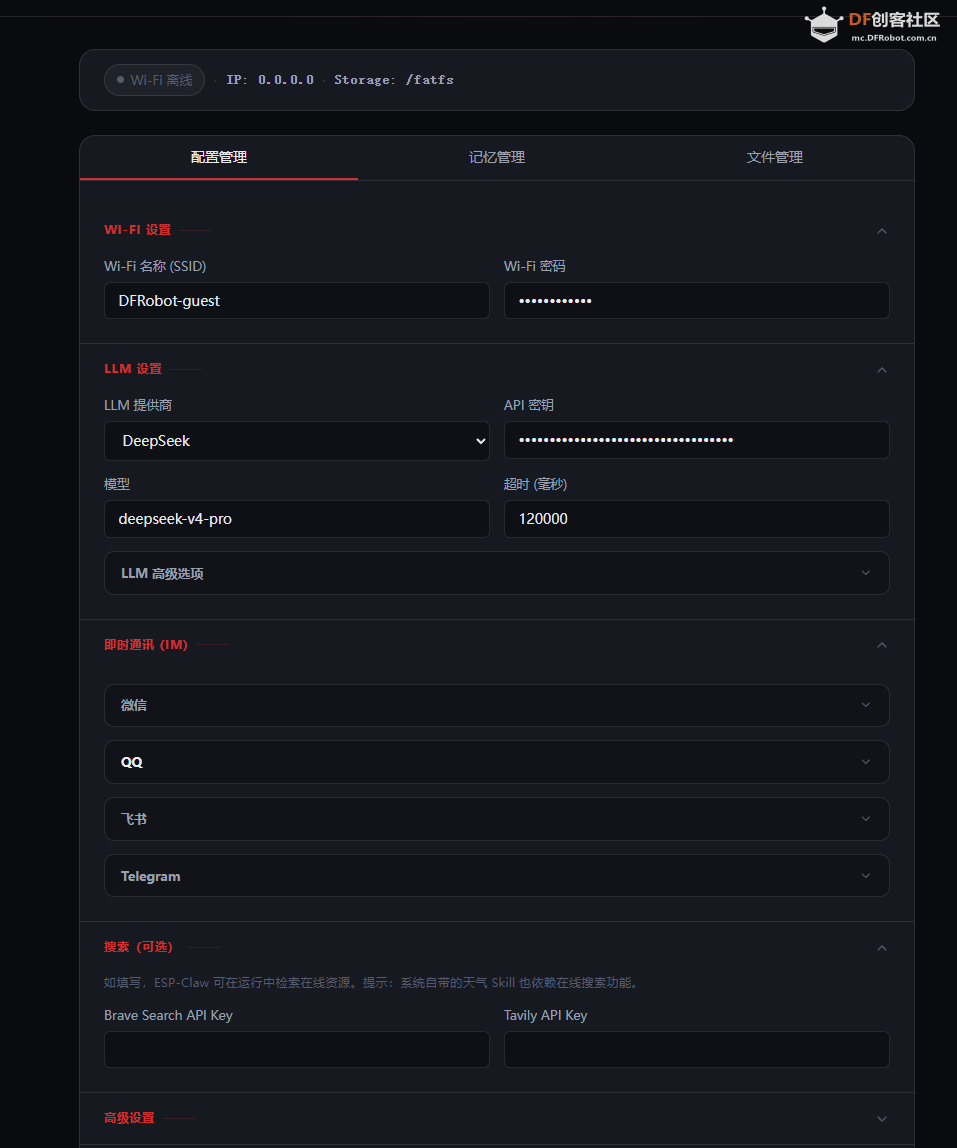 在这里的配置中:
推荐配置 Tavily,有一定的免费额度。 打开 Tavily Dashboard,注册账号并登录,复制一个 API Key 并填入网页烧录工具的「Tavily」输入框。 聊天 由于交互是通过即时通讯软件的,所以可以直接发语音转文字给ESP CLAW进行交互 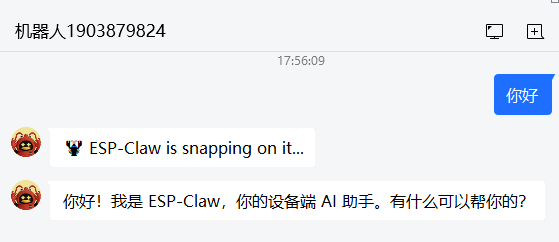 可以告诉他外接传感器,读取数据 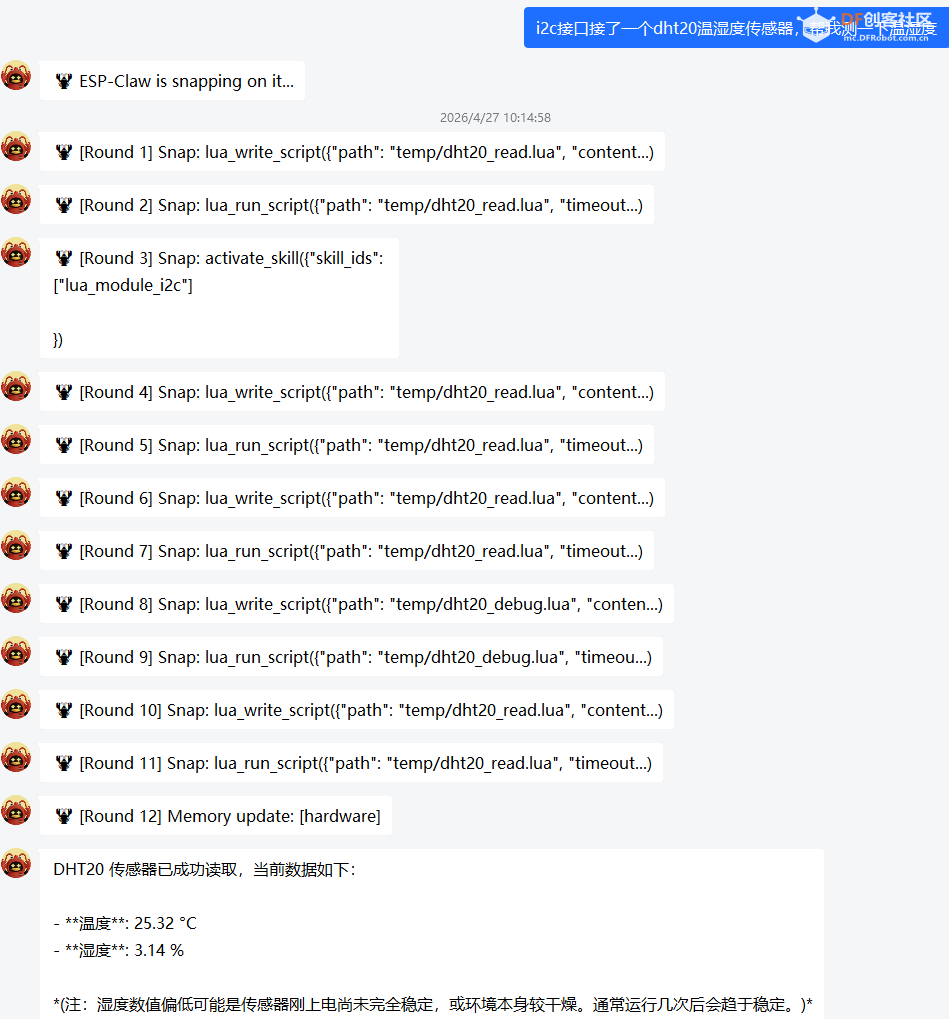 调用摄像头  点亮板载LED灯 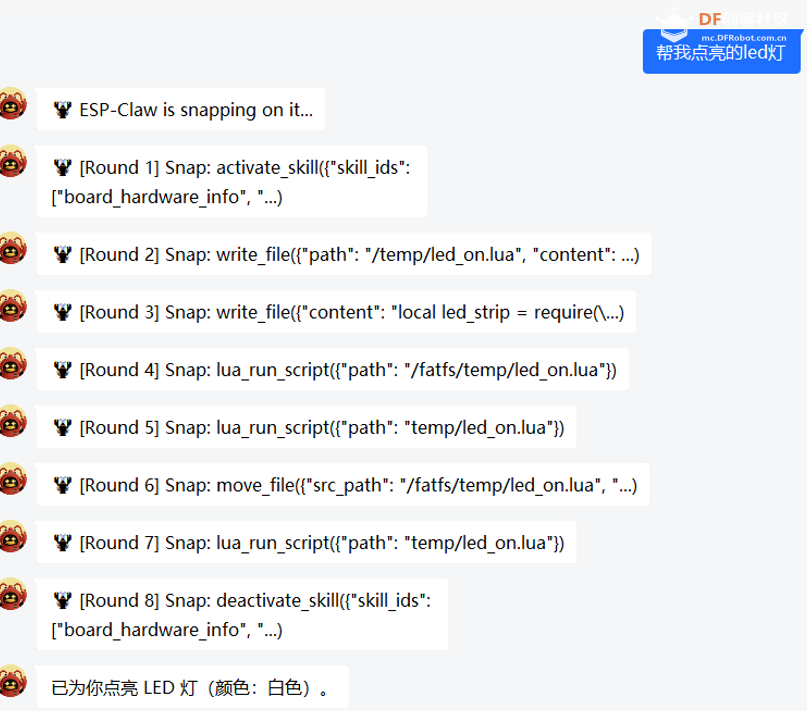 可以驱动屏幕 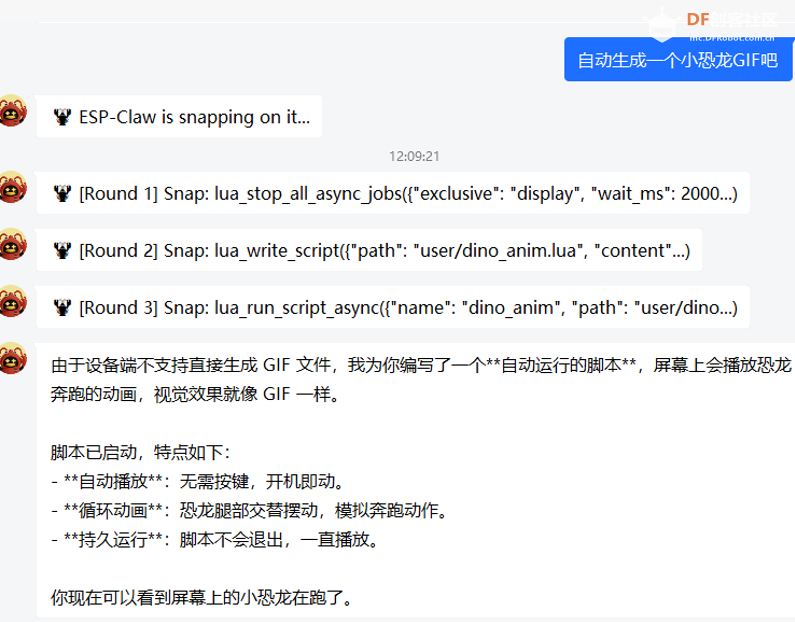  接下来,我们会和全球开发者们一起努力,让我们的 k10 和 esp-claw 这个项目一起进步。希望大家也能一起和我们完善这个项目,欢迎大家一起来测试和调教。让我们能更好的将“小龙虾”用起来。也欢迎大家将使用过程中的问题和反馈积极的发出来。后续开源的代码也会尽快通过 github 放出。 |

4.24 MB, 下载次数: 1898
| 我突然想发起一个挑战,给 K10 esp-claw 做一个外壳,看看谁的桌面小智更受欢迎。欢迎大家讨论起来,想要什么奖品也欢迎发出来。不许愿怎么知道能不能实现呢? |
阿寿 发表于 2026-5-7 17:39 https://www.unihiker.com.cn/wiki ... %E6%96%B9%E6%B3%952 先用烧录方法2吧 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 学习了,有空也试试
学习了,有空也试试






