|
12717| 0
|
[项目] Wii Nunchuck手柄控制的6自由度机械臂 |
|
机械臂、机械手相信大家都不陌生了,医院里的手术机械手、工厂的里的工业机械手,虽然大家从电视里或现场见过,但其庞大的身躯和高额的售价,使我们望而却步,如今一款小型廉价的6自由度机械臂,能圆大家一个玩机械手的梦! DFRA6DOF(Robotic Arm 6 Degrees of Freedom)6自由度机械臂由6个微型伺服电机(舵机)组成,分别对应于臂、肘、腕(2个自由度)、张合5个关节和1个旋转底座,每个关节可在一定范围内运动,底座可以实现左右90度旋转。通过上位机控制软件给舵机控制器发送控制指令,从而实现机械臂在空间中的精确作业,任务完成情况可通过在机械臂上安装摄像头反馈图像。机械臂也可安装到移动平台上,可完成远程无线可视作业,适用于对人体有害的场所。关节部分杯士轴承的安装螺丝均使用圆帽螺母,防止刮伤您的手,人性化设计确保您能尽情享受那份DIY的乐趣! 一、6自由度机械臂的安装 所有舵机在使用前,都必须使用舵机控制器将角度调整到90度。或者通过对Arduino编程控制这个舵机旋转到90度再调整舵盘安装。 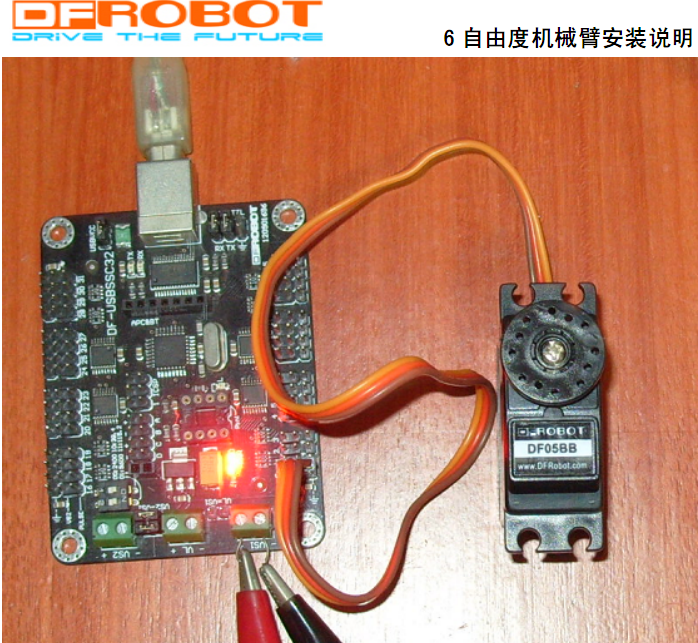 使码盘四个圆孔成正十字。 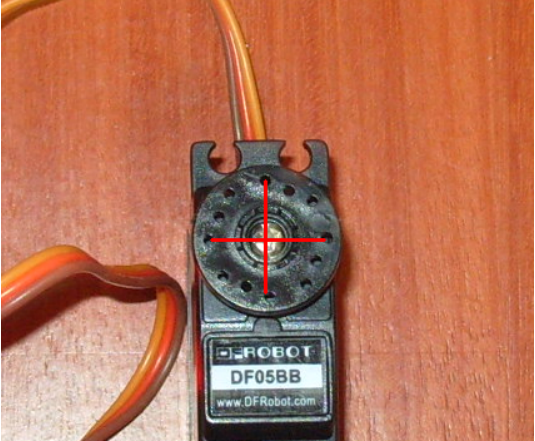 将标有1号的旋转盘找出来,在其下面安装四个M3*10的单头铜柱, 上面用圆帽螺母拧好。  接着在1号盘上面的对应位置安装5个M3*30的单头铜柱。  ·将标有4号的旋转盘找出来,在其下面对应位置安装4个M3*10的单头铜柱,上面用圆帽螺母固定好。 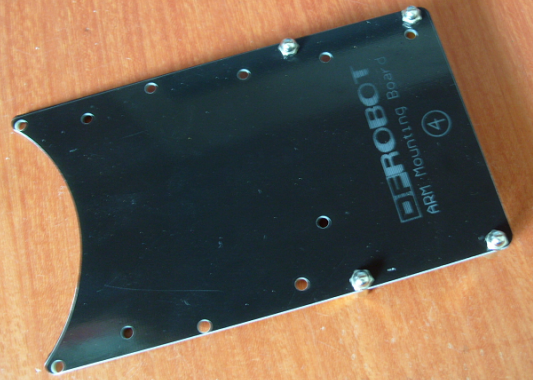 将4号盘放在1号盘对应位置,用2个M3*10的单头铜柱固定好。 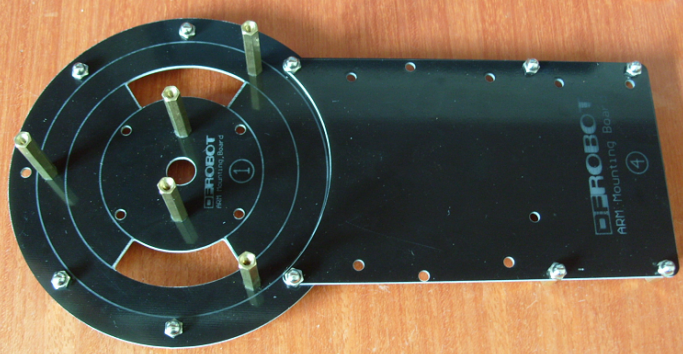 将2号盘和一只归位好的DF05BB舵机准备好。 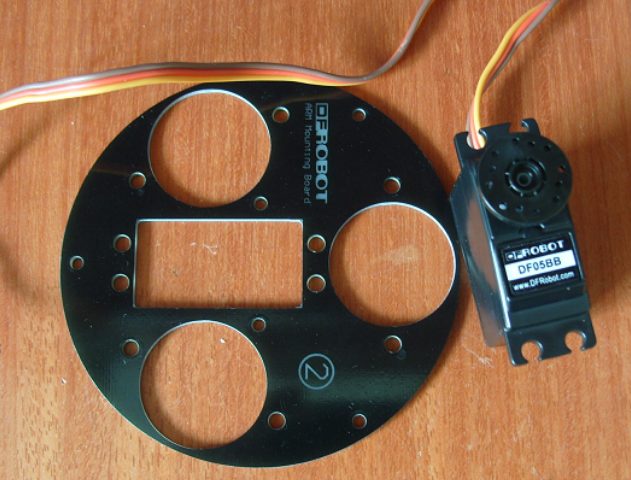 将舵机按照如图位置安装在2号盘上。  在2号盘上安装3个万向轮。 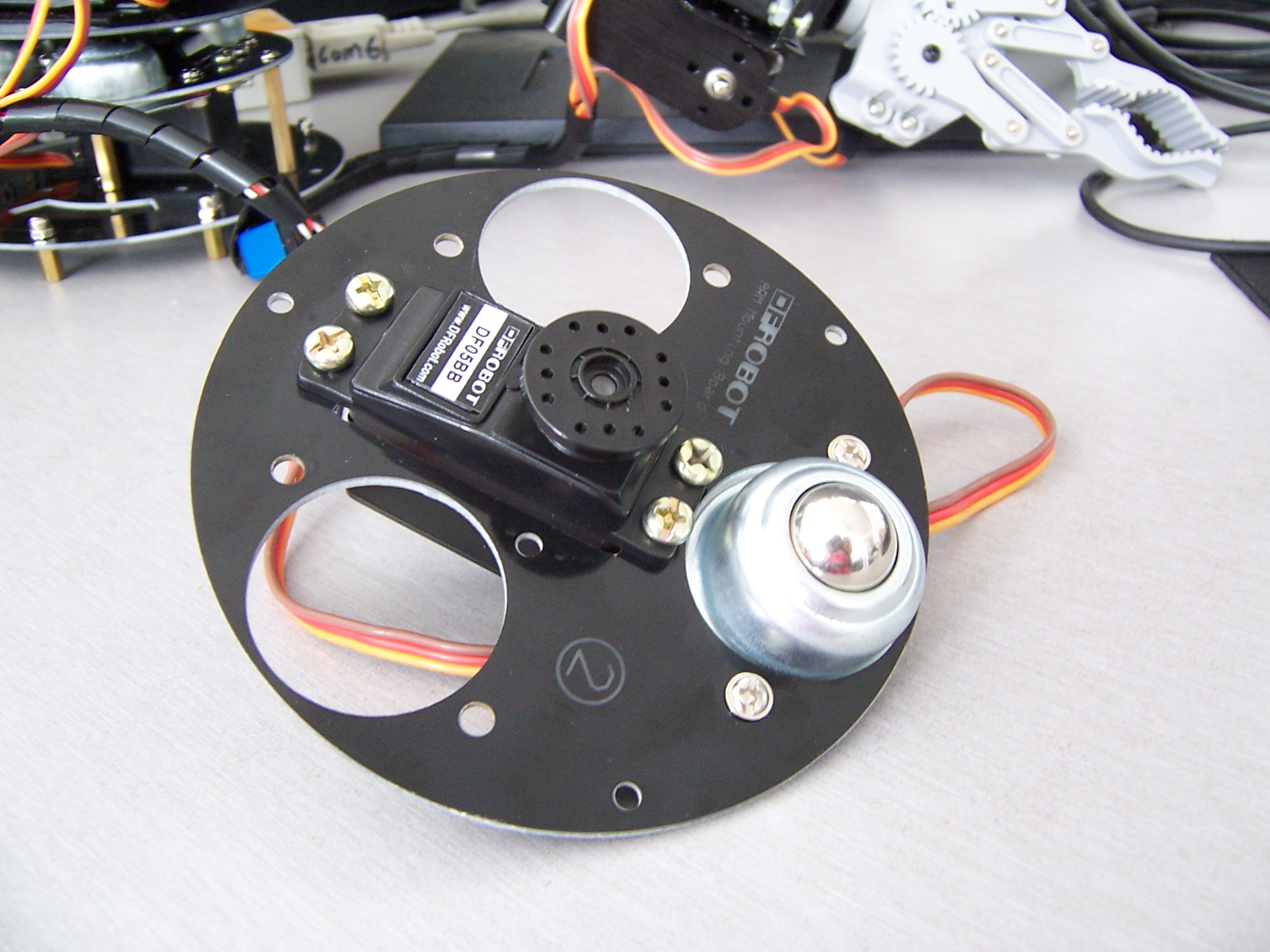 详细制作过程文档及其实例代码见附件:  Robot_Arm.zip Robot_Arm.zip源代码: [mw_shl_code=applescript,true]#include <Servo.h> #include <math.h> #include <stdlib.h> #include "Wire.h" #include "WiiChuck.h" //定义舵机 Servo servo1; Servo servo2; Servo servo3; Servo servo4; Servo servo5; Servo servo6; WiiChuck wii = WiiChuck(); int x,y,xa,xa1=2,xa2,xa3,xa4,ya,ya1,ya2,ya3,ya4,c,z;//定义变量 void act_init()//初始化动作子函数 { servo1.write(90); servo2.write(70); servo3.write(30); servo4.write(90); servo5.write(90); servo6.write(30); } void setup() { //定义舵机控制口 servo1.attach(8); servo2.attach(9); servo3.attach(10); servo4.attach(11); servo5.attach(12); servo6.attach(13); act_init();//初始化 wii.initWithPower();//初始化电源引脚 } void loop() { while(1) { if(true==wii.read()) { //读取手柄的值 //读取手柄的值 x=wii.getJoyAxisX();//摇杆x轴的值 y=wii.getJoyAxisY();//摇杆y轴的值 xa1=wii.getAccelAxisX();//手柄x方向摆动的值 ya1=wii.getAccelAxisY();//手柄y方向摆动的值 c=wii.getButtonC();//手柄按键c的值 z=wii.getButtonZ();//手柄按键z的值 delay(30); x=wii.getJoyAxisX();//摇杆x轴的值 y=wii.getJoyAxisY();//摇杆y轴的值 xa2=wii.getAccelAxisX();//手柄x方向摆动的值 ya2=wii.getAccelAxisY();//手柄y方向摆动的值 c=wii.getButtonC();//手柄按键c的值 z=wii.getButtonZ();//手柄按键z的值 delay(30); x=wii.getJoyAxisX();//摇杆x轴的值 y=wii.getJoyAxisY();//摇杆y轴的值 xa3=wii.getAccelAxisX();//手柄x方向摆动的值 ya3=wii.getAccelAxisY();//手柄y方向摆动的值 c=wii.getButtonC();//手柄按键c的值 z=wii.getButtonZ();//手柄按键z的值 delay(30); x=wii.getJoyAxisX();//摇杆x轴的值 y=wii.getJoyAxisY();//摇杆y轴的值 xa4=wii.getAccelAxisX();//手柄x方向摆动的值 ya4=wii.getAccelAxisY();//手柄y方向摆动的值 c=wii.getButtonC();//手柄按键c的值 z=wii.getButtonZ();//手柄按键z的值 delay(30); xa=(xa1+xa2+xa3+xa4)/4;//取均值 xa=xa-40;//为了让90成为中点值 ya=(ya1+ya2+ya3+ya4)/4;//取平均值 ya=ya-40; } if((x==130||x==131)&&y==255&&z==1)//摇杆位置为向前 { if(xa<30)//限制最小值 xa=30; if(xa>150)//限制最大值 xa=150; servo1.write(xa);//给舵机旋转的度数 delay(10); } else if((x==130||x==131)&&y==0)//摇杆位置向后 { if(ya<30) ya=30; if(ya>150) ya=150; servo2.write(ya);//给舵机旋转的度数 delay(10); } else if(x==0&&(y==130||y==129))//摇杆的位置向左 { ya=175-ya;//为了让手柄在Y轴向前的时候,舵机3也向前 if(ya<20) ya=20; if(ya>150) ya=150; servo3.write(ya);//给舵机旋转的度数 delay(10); } else if(x==255&&(y==130||y==129))//摇杆的位置向右 { ya=175-ya; if(ya<30) ya=30; if(ya>80) ya=80; servo4.write(ya);//给舵机旋转的度数 delay(10); } else if(c==0)//手柄按键c按下 { if(xa<30) xa=30; if(xa>150) xa=150; servo5.write(xa);//给舵机旋转的度数 delay(10); } else if(z==0)//手柄按键z按下 { if(ya<40) ya=40; if(ya>110) ya=110; servo6.write(ya);//给舵机旋转的度数 delay(10); } } }[/mw_shl_code] |
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






