|
16665| 0
|
[项目] 【转】arduino制作的L3G4200D + ADXL345卡尔曼滤波自平衡小车 |
两轮自平衡小车的底座基本弄好了,用了个简单的塑料盒子加上两个直流电机和轮胎组成的,比较简陋,但凑合能用。  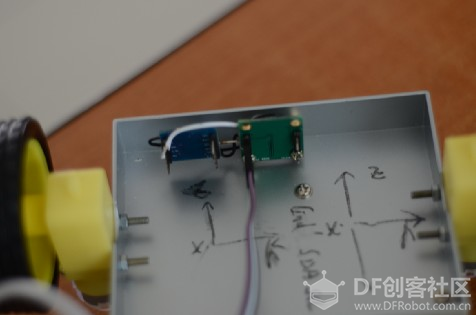 小车下面就是 L3G4200D + ADXL345 两个模块,加速度模块没固定好,板子太小了没地方打孔,有时间将两个模块焊到一个万能板上应该会容易固定一些。 加速度模块角度计算: 如果传感器 x 轴朝下, y 轴朝前 那竖直方向弧度计算公式为: angle = atan2(y, z) //结果以弧度表示并介于 -pi 到 pi 之间(不包括 -pi) 如果要换算成具体角度: angle = atan2(y, z) * (180/3.14) 陀螺仪角度计算:  式中angle(n)为陀螺仪采样到第n次的角度值; angle(n-1)为陀螺仪第n-1次采样时的角度值; gyron为陀螺仪的第n次采样得到的瞬时角速率值; dt为运行一遍所用时间; angle_n += gyro(n) * dt //积分计算 卡尔曼滤波 网上找的kalman滤波,具体代码如下 [mw_shl_code=applescript,true]static const float dt = 0.02; static float P[2][2] = {{ 1, 0 }, { 0, 1 }}; float angle; float q_bias; float rate; static const float R_angle = 0.5 ; static const float Q_angle = 0.001; static const float Q_gyro = 0.003; float stateUpdate(const float gyro_m){ float q; float Pdot[4]; q = gyro_m - q_bias; Pdot[0] = Q_angle - P[0][1] - P[1][0]; /* 0,0 */ Pdot[1] = - P[1][1]; /* 0,1 */ Pdot[2] = - P[1][1]; /* 1,0 */ Pdot[3] = Q_gyro; /* 1,1 */ rate = q; angle += q * dt; P[0][0] += Pdot[0] * dt; P[0][1] += Pdot[1] * dt; P[1][0] += Pdot[2] * dt; P[1][1] += Pdot[3] * dt; return angle; } float kalmanUpdate(const float incAngle) { float angle_m = incAngle; float angle_err = angle_m - angle; float h_0 = 1; const float PHt_0 = h_0*P[0][0]; /* + h_1*P[0][1] = 0*/ const float PHt_1 = h_0*P[1][0]; /* + h_1*P[1][1] = 0*/ float E = R_angle +(h_0 * PHt_0); float K_0 = PHt_0 / E; float K_1 = PHt_1 / E; float Y_0 = PHt_0; /*h_0 * P[0][0]*/ float Y_1 = h_0 * P[0][1]; P[0][0] -= K_0 * Y_0; P[0][1] -= K_0 * Y_1; P[1][0] -= K_1 * Y_0; P[1][1] -= K_1 * Y_1; angle += K_0 * angle_err; q_bias += K_1 * angle_err; return angle; [/mw_shl_code] 波形显示 测试说明——单片机采集加速度和陀螺仪的信号,并使用上面的kalman滤波,计算出最优倾角,通过串口发送到pc机,pc机运行的串口示波器将相关波形显示出来。 1、蓝色为加速度换算后的角度。 2、黄色为陀螺仪直接积分后的角度。 3、红色为kalman滤波后的角度。 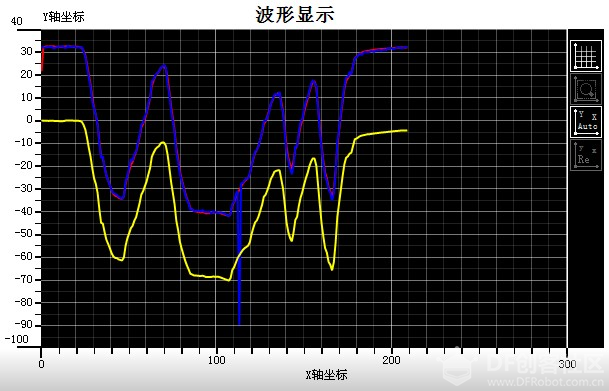 用手指敲小车可以看到加速度模块计算获取的角度震动比较厉害,经过卡尔曼滤波后的波形相对平缓一些。 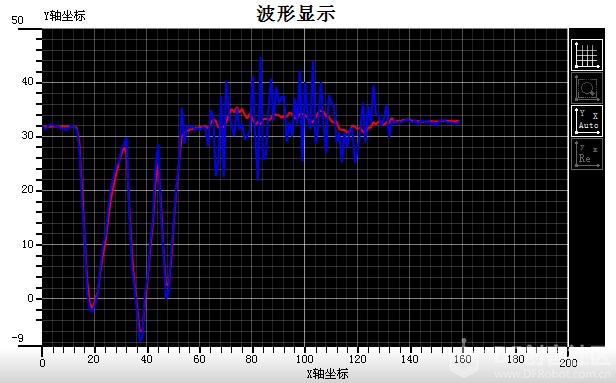 局部放大看一下曲线还是很优美的哦,哈。。 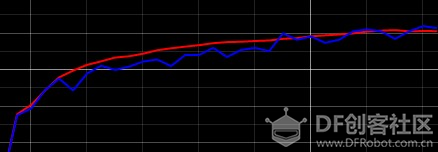 波形显示用了园子里xf_z1988的开源波形控件,他的主页是:http://www.cnblogs.com/xf_z1988/ |
 活跃会员
活跃会员



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






