|
8594| 3
|
[入门教程] 【掌控】mpython_30…掌控9g小舵机,360度舵机和带驱动N20电机 |

|
掌控mpythom基础库中已经集成舵机驱动。 新写的舵机库更方便,好用,只要写入引脚,角度,舵机就会-----认真执行。 有了舵机库,可以驱动哪些设备呢,大圣老师来测试一下。 1、SG90 9g小舵机 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。  SG90 红 - 正 棕 - 负 橙 - 信号  DFRobot 出品的DF9GMS 180°微型舵机,该舵机采用高强度ABS透明外壳配以内部高精度尼龙齿轮组,加上精准的控制电路、高档轻量化空心杯电机使该微型舵机的重量只有9克,而输出力矩达到了惊人的1.6kg*cm。  2、360度舵机 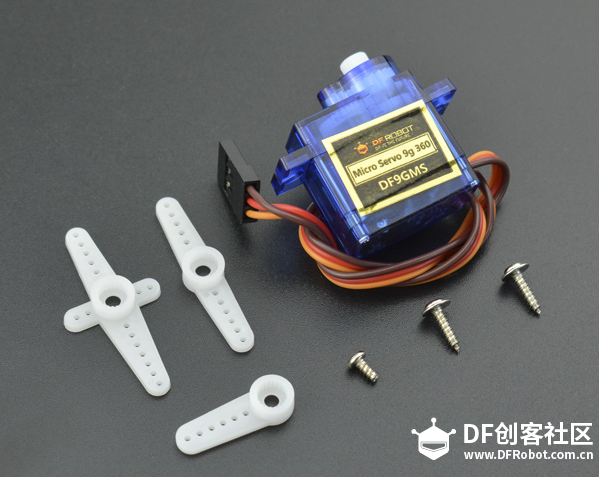
3、带驱动的N20电机 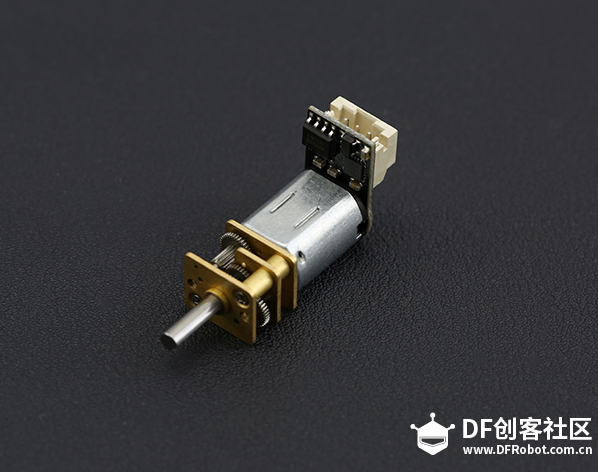 DFRobot荣誉推出带驱动微型金属减速电机。这款带驱动的金属减速电机相对更加实用,无需外部电机驱动即可轻松驾驭。仅需要一根控制管脚,即可以实现电机正/反转控制和速度控制要求。 电机采用了普适的360度伺服舵机控制方案,兼容性更广。在这基础上还做了针对性调整,增大了停止点脉宽;减少了待机功耗,无控制信号情况下电流小于1mA。
【舵机测试】 注意,这里只是用SG90小舵机测试。 视频 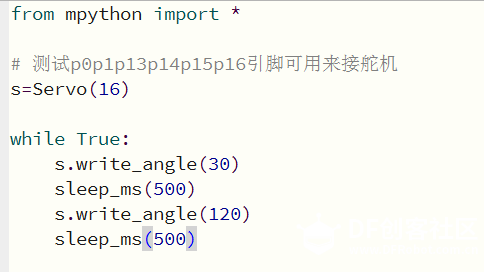 [mw_shl_code=python,true]from mpython import * s=Servo(13) while True: for i in range(0,180,5): s.write_angle(i) sleep_ms(50) for i in range(180,0,-5): s.write_angle(i) sleep_ms(50)[/mw_shl_code] 【360度舵机测试】 视频: [mw_shl_code=python,true]from mpython import * # 360度舵机测试 接p1p16 s1=Servo(1) s2=Servo(16) while True: s1.write_angle(0) # 前进 s2.write_angle(180) sleep_ms(3000) s1.write_angle(84) # 停止 90度左右调整(每个舵机不同)直到停止 有的360度舵机后面有个小窗口可以设为90度用螺丝刀微调电位器 s2.write_angle(87) sleep_ms(3000) s1.write_angle(180) # 后退 s2.write_angle(0) sleep_ms(3000) s1.write_angle(84) # 停止 s2.write_angle(87) sleep_ms(3000)[/mw_shl_code] 【带驱动N20电机测试】 视频 [mw_shl_code=python,true]from mpython import * #带驱动N20机测试 接p1p16 s1=Servo(1) s2=Servo(16) while True: s1.write_angle(0) # 前进 s2.write_angle(180) sleep_ms(3000) s1.write_angle(90) # 停止 90度 s2.write_angle(90) sleep_ms(3000) s1.write_angle(180) # 后退 s2.write_angle(0) sleep_ms(3000) s1.write_angle(90) # 停止 s2.write_angle(90) sleep_ms(3000)[/mw_shl_code] 【拓展】 伙伴们,有了舵机驱动,是不是可以做出超多好玩的项目来啊。 一起创起来吧。 |
© 2013-2024 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









