|
9093| 2
|
[教程] Romeo for Edison Controller 多舵机实验 |
|
本帖最后由 dwblinux 于 2014-12-10 10:54 编辑 Romeo for Edison Controller 多舵机实验  【元件清单和硬件连接图】 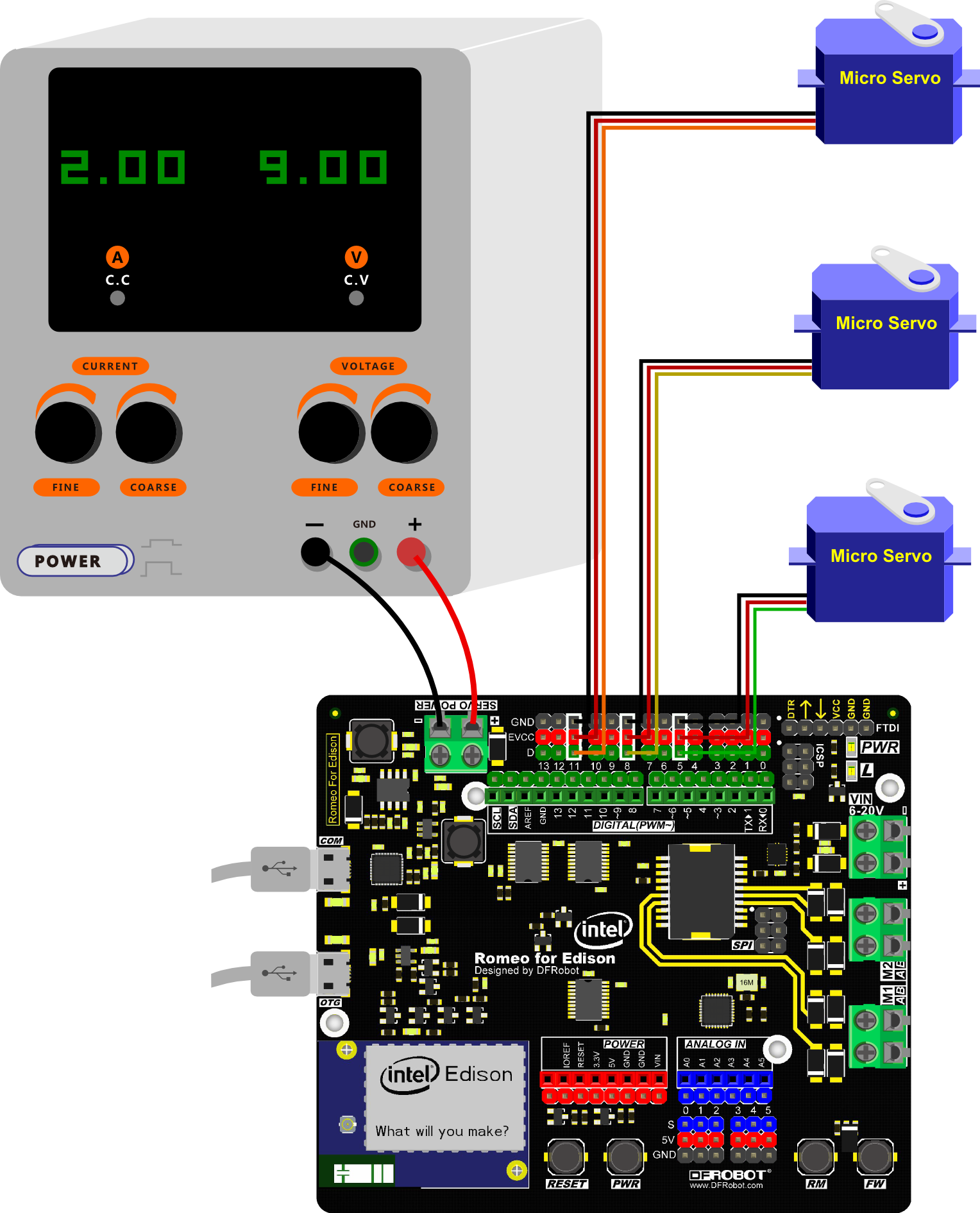 1x micro USB数据线 1x Romeo for Edison Controller板 1x 直流电源 【软件编程】 #include <Servo.h> Servo servo1; Servo servo2; Servo servo3; void setup(){ servo1.attach(5); //定义舵机1控制口为Pin5 servo2.attach(8); //定义舵机2控制口为Pin8 servo3.attach(11); //定义舵机3控制口为Pin11 Serial.begin(19200);//设置波特率 Serial.print("Ready"); } void loop(){ static int v = 0; if ( Serial.available()) { char ch = Serial.read(); //读取串口数据 switch(ch) { case '0'...'9': v = v * 10 + ch - '0'; //字符换算成10进制 break; case 'a': //如果数据后带a,则表示是servo1的数据,比如串口发送85a servo1.write(v); v = 0; break; case 'b': //如果数据后带b,则表示是servo2的数据,比如串口发送90b servo2.write(v); v = 0; break; case 'c': //如果数据后带c ,则表示是servo3的数据,比如串口发送180c servo3.write(v); v = 0; break; } } }  【效果】 通过IDE中的串口助手,发送舵机度数控制舵机转动的角度,比如发送字符85a表示舵机1转动85度,发送字符180c表示舵机3转动180度。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






